

getmanov_v_g_cifrovaya_obrabotka_signalov_uchebnoe_posobie / getmanov_v_g_cifrovaya_obrabotka_signalov_uchebnoe_posobie
.pdfбенностей информации от ОУ и требований к информации для СВУ.
Рассмотрим более детально назначения и основные характеристики составляющих систем.
ОУ – объект управления – характеризуется векторами входных управляющих переменных u1(Ti) (u1(t)) и векторами выходных
переменных, которые в ряде случаев определяются как векторы фазовых координат x(t) x(p(t), t), p(t) – векторные парамет-
рические функции.
Решение задач ЦОС, в ряде случаев, может быть сопряжено с необходимостью построения для ОУ математических моделей, которые связывают зависимостями входные и выходные переменные. В простейшем случае для статических ОУ связь между входными и выходными переменными определяется модельными нелинейными функциями от нескольких переменных, которые можно представить в скалярном или векторном виде:
x1(t) |
f1( p1(t),..., pq (t), u11(t),..., |
u1m(t)), |
|
. . . |
(1.1.1) |
x1(t) |
f1( p1(t),..., pq (t), u11(t),..., |
u1m(t)), |
|
x(t) f (x(t), p(t), u1(t)) . |
(1.1.2) |
Связь между векторами управляющих переменных и векторами фазовых координат для динамических ОУ определяется системами модельных дифференциальных уравнений. Для динамических ОУ с сосредоточенными параметрами модельные дифференциальные уравнения в векторном виде представляются следующим образом:
dx |
f (x(t), p(t), u1(t)) . |
|
dt |
||
|
ОУ с распределѐнными параметрами описываются модельными дифференциальными уравнениями с частными производными.
Необходимо отметить отличия параметрических функций p(t) и управляющих переменных u1(Ti) . Управления u1 (Ti) являются полностью известными; параметрические функции p(t) – некото-
рые неизвестные функции, относительно которых могут быть сведения только об их самых общих характеристиках.
11

В инженерной практике ЦОС иногда рассматриваются чрезвычайно сложные ОУ, функционирование которых не может быть адекватно описано с достаточной точностью предлагаемыми статическими или динамическими моделями. В этом случае описание моделей ОУ осуществляется с привлечением теоретико-вероятно- стных представлений.
ССД – система сбора данных – обеспечивает промежуточное накопление и предварительную цифровую обработку многоканальной информации об объекте управления. На вход системы ССД поступает вектор фазовых координат x(t) x( p(t), t) и вектор
управления u2 (Ti), реализующий настройку ССД. Выходом ССД являются векторы наблюдений y(Ti) фазовых координат, связанные с фазовыми координатами x(Ti) и помеховыми возмущениями w(Ti) , которые обусловливают погрешности в наблюдениях. Наблюдения описываются следующей модельной зависимостью:
y(Ti) h(x(Ti), w(Ti), u2(Ti)) , |
(1.1.3) |
где вид модельной функции наблюдения h( , , ) определяется кон-
струкцией ССД.
СОИ – система обработки информации – обеспечивает по входной информации-наблюдениям от ССД y(Ti) и вектору управления
u3 (Ti), который предназначен для настройки алгоритмов СОИ, решение задачи вычисления оценок фазовых координат x (Ti) и оценок параметрических функции p (Ti) , которая, по-существу,
является центральной для ЦОС.
СВУ – система выработки управлений – осуществляет формирование необходимых управляющих воздействий u1(Ti) для ОУ,
u2 (Ti) для ССД и u3 (Ti) для СОИ по информации от СОИ. В об-
щем виде |
можно записать: u1(Ti) |
u1(x (Ti), |
p (Ti)), |
u2 (Ti) |
u2(x (Ti), |
p (Ti)), u2(Ti) u2(x (Ti), |
p (Ti)), |
u3(Ti) |
u3(x (Ti), |
p (Ti)) . |
|
|
|
|
1.1.2. Модельная цифровая ИУС
Рассмотрим пример модельной цифровой ИУС, предназначенной для проведения виброиспытаний конструкции крыла самолѐта.
12
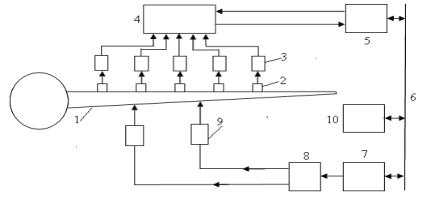
На рис. 1.1.2 изображена еѐ упрощѐнная блок-схема. Одна из возможных целей проведения виброиспытаний может заключаться в построении математической модели изгибно-крутильных колебаний крыла под действием распределѐнных нагрузок. При динамическом нагружении крыло ведѐт себя как упругодеформируемая система и колебательные движения крыла описываются в общем случае дифференциальными уравнениями с частными производными.
Рис. 1.1.2. Блок-схема системы виброиспытаний конструкции крыла самолѐта
На верхней поверхности крыла 1 устанавливается система датчиков виброускорений 2 в заданной системе точек. Выходные сигналы от датчиков подаются на систему усилителей 3 и далее на многоканальные входы электронного блока 4, где производится их аналоговая фильтрация, оцифровка в устройстве дискретизации и промежуточное хранение в буферном запоминающем устройстве. Специализированная ЭВМ 5 связывает блок 4 с линией локальной вычислительной сети ЛВС 6. Специализированная ЭВМ 7, подсоединѐнная к ЛВС, производит управление электронным блоком 8, который задаѐт режимы работы системы динамических вибровозбудителей 9 и реализует силовые воздействия в определѐнных точках на нижней поверхность крыла. Специализированная ЭВМ 10 управляет вибровозбудителями, производит сбор информации от датчиков и осуществляет обработку результатов виброиспытаний.
Представленная блок-схема является сильно упрощѐнной. Реальные подобные цифровые ИУС включают в свой состав сотни
13
датчиков и десятки вибровозбудителей. Управление такими системами может осуществляться только на основе ЭВМ.
Для малых воздействий от вибровозбудителей колебательные движения крыла описываются системами линейных дифференциальных уравнений с постоянными коэффициентами, которые связывают функции смещений в заданных точках и функции силовых воздействий в определѐнной системе точек на нижней поверхности крыла. В случае, если динамические вибровозбудители реализуют тестовые синусоидальные воздействия, то установившиеся колебания в системе точек крыла, где размещены датчики виброускорений, также являются синусоидальными и характеризуются соответствующими амплитудами и фазовыми сдвигами. С помощью проведения измерений амплитуд и фазовых сдвигов колебаний в системе точек крыла и измерений системы тестовых воздействий могут быть вычислены соответствующие амплитудно-частотные и фазочастотные характеристики (АЧХ и ФЧХ), которые составляют основу математической модели крыла.
В рассматриваемой ИУС датчики 2, усилители 3, электронный блок 4 и специализированная ЭВМ образуют ССД; вибровозбудители 9, электронный блок 8, специализированная ЭВМ 7 образуют СВУ; ЛВС 6 и ЭВМ 10 реализует СОИ; крыло 1 представляет собой ОУ.
1.2.Сигналы и варианты алгоритмов ЦОС
1.2.1. Классификация сигналов, непрерывные и дискретные сигналы
Сигналы могут классифицироваться многими способами, например, в зависимости от предметной области и решаемых задач.
Сигналы бывают детерминированными и случайными: 1) детерминированными или регулярными называются сигналы, которые описываются функциями заданного вида и в которых известны все параметры этих функций; 2) квазидетерминированными называются сигналы, которые описываются функциями известного вида, однако один или несколько параметров этих функций являются случайными величинами; 3) случайными называются сигналы, значения которых в каждый момент времени представляют собой слу-
14
чайные величины. Случайные сигналы могут быть стационарными
и нестационарными.
Сигналы различаются видом дискретизации. Дискретизация сигналов может быть осуществлена по времени и по уровню. На рис. 1.2.1а–1.2.1г проиллюстрированы различные виды дискретизации сигналов.
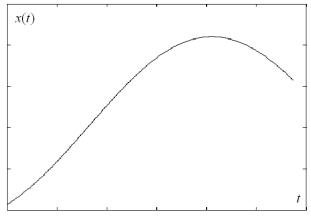
Исходный физический сигнал x(t) (напряжение, ток и т.д.) яв-
ляется непрерывной функцией времени t, определѐнной на конечном или бесконечном интервале времени (см. рис. 1.2.1а). Подобные непрерывные сигналы в ряде случаев называются аналоговыми. Последовательность чисел, представляющая собой значения сигнала в дискретные моменты времени, называется отсчѐтами сигнала и составляет дискретный ряд. Как правило, отсчѐты берутся через равные промежутки времени T, называемые периодом дискретизации (интервалом, шагом дискретизации). Процесс преобразования непрерывного сигнала в последовательность отсчѐтов называется дискретизацией и результат подобного преобразования является сигналом хДВ(Ti), в котором произведена дискретизация по време-
ни (см. рис. 1.2.1б). Представление непрерывного сигнала в виде набора дискретных отсчѐтов приводит к потере информации, поскольку не учитываются значения сигнала в промежутках между отсчѐтами.
Рис. 1.2.1а. Непрерывный сигнал x(t) (аналоговый сигнал)
15
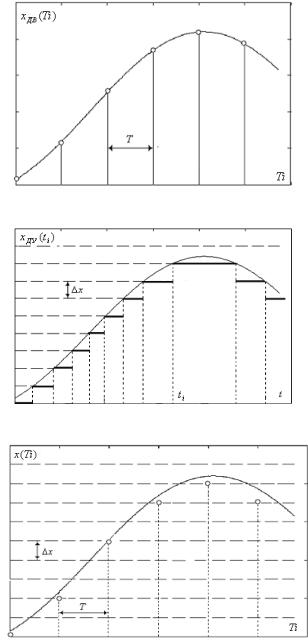
Рис. 1.2.1б. Сигнал, xДВ(Ti), дискретизованный по времени
Рис. 1.2.1в. Сигнал xДУ (ti ), дискретизованный по уровню
Рис. 1.2.1г. Сигнал x(Ti), дискретизованный по времени и по уровню
16

Квантование по уровню пояснено на рис. 1.2.1в. Сигналы, квантованные только по уровню и обозначаемые как xДУ (ti ), представ-
ляют собой последовательность кусочно-постоянных функций с переключениями ti , расположенными неравномерно во времени,
х – шаг квантования по уровню.
При обработке сигналов в вычислительных устройствах отсчѐты представляются в виде двоичных чисел с конечным числом разрядов. Из-за этого отсчѐты могут принимать только конечное множество значений, приводящее к округлению и внесению погрешностей. Сигнал, дискретизованный во времени и квантованный по уровню x(Ti), называется цифровым (см. рис. 1.2.1г). Вычисли-
тельные устройства, предназначенные для обработки сигналов, оперируют только с цифровыми сигналами. Однако в ряде случаев, когда рассматриваются дискретные сигналы, эффекты, связанные с квантованием по уровню, не принимаются во внимание.
1.2.2. Этапы проведения ЦОС
Проведение цифровой обработки сигналов удобно подразделить на два этапа. В соответствии с этими двумя этапами, на которых решаются специальные задачи, может быть произведена классификация алгоритмов ЦОС.
Этап предварительной обработки. Первый этап ЦОС состоит в проведении вычислительных процедур, которые направлены на решение задач типа редактирования, повышения точности и достоверности и определения элементарных статистических характеристик для дискретизованных сигналов. На этом этапе реализуются процедуры, которые используют алгоритмы:
устранения аномальных значений в дискретизованных сигналах; устранения пропусков в дискретизованных сигналах в дискрети-
зованных сигналах; устранения помеховых аддитивных и мультипликативных трен-
дов в дискретизованных сигналах; вычисления элементарных статистических характеристик для
дискретизованных сигналов; сжатия (архивирования) и разархивирования сигналов.
Разумеется, этот перечень алгоритмов может быть расширен и уточнѐн. После проведения первого предварительного этапа осу-
17

ществляется второй этап цифровой обработки, заключающийся в решении задач анализа сигналов.
Этап анализа сигналов. Второй этап ЦОС состоит в проведении вычислительных процедур, осуществляющих, главным образом, определение физической природы (идентификации) сигналов и оценивания их параметров. Второй этап цифровой обработки, как правило, реализует алгоритмы:
цифрового спектрально-корреляционного анализа дискретизованных сигналов;
цифровой фильтрации дискретизованных сигналов; построения математических моделей и оценивания параметров
дискретизованных сигналов.
Так же, как и для первого этапа, этот перечень алгоритмов может быть уточнен и значительно дополнен.
1.2.3. Варианты алгоритмов ЦОС
Опишем основные варианты типовых алгоритмов ЦОС, реализующих линейные преобразования дискретных сигналов. Будем обозначать: – входной, в общем случае комплексный сигнал;
T – интервал дискретизации; i – дискретный индекс. В ряде случаев выходной сигнал будем обозначать как x(Ti); иногда выходную
последовательность будем обозначать как c(k). Разумеется, для
ЦОС реализуются и нелинейные преобразования сигналов, например при вычислении корреляционных или ковариационных функций.
Алгоритм дискретного преобразования Фурье (ДПФ). Для данного алгоритма входной дискретный, в общем случае ком-
плексный сигнал в виде конечной последовательности y(i) |
y(Ti), |
||||||||||
i |
0, 1,..., N 1, и выходная конечная комплексная последователь- |
||||||||||
ность c(k) связаны зависимостью |
|
|
|
||||||||
|
|
1 N 1 |
j |
2 |
ki |
|
|
|
|
||
|
|
|
|
k |
0, 1,..., N 1. |
|
|||||
|
c(k) |
|
|
e |
|
N |
|
y(i) , |
(1.2.1) |
||
|
N i |
|
|||||||||
|
|
0 |
|
|
|
|
|
|
|
||
ДПФ представляет |
собой |
линейное |
преобразование |
вектора |
|||||||
yT |
(y(0), y(1),..., y(N |
1)) |
|
в |
|
вектор |
cT (c(0), c(1),..., c(N 1)). |
||||
|
|
|
|
|
|
|
|
18 |
|
|
|
Данное линейное преобразование (1.2.1) может быть представлено в матрично-векторном виде
c Dy,
где элементы квадратной матрицы D(N, N), обозначаемые как dik , вычисляются как значения комплексной синусоидальной функции
|
1 |
|
j |
2 |
ki |
1 |
|
2 |
|
|
2 |
|
|
|
dik |
e |
N |
cos |
ki |
j sin |
ki , |
i, k 0, 1,..., N 1. |
|||||||
|
|
|
|
|
|
|||||||||
|
N |
|
|
|
N |
|
N |
|
|
N |
|
|
||
|
|
|
|
|
|
|
|
|
|
Алгоритм ДПФ является фактически основным в рассматриваемой ЦОС; одно из основных применений ДПФ – спектральный анализ дискретных данных.
Алгоритм дискретной свёртки. Этот алгоритм в частном слу-
чае представлен выражением
i |
|
|
|
|
x(i) |
h(i |
s)y(s) , |
|
(1.2.2) |
s |
0 |
|
|
|
где y(s) – входная последовательность, s |
0, 1,..., N 1; |
x(i) – |
||
выходная последовательность, |
i |
0, 1,..., N |
1 , а функция |
цело- |
численного переменного h(m), являющаяся весовой, иногда назы-
вается ядром свѐртки.
Далее будет показано, что алгоритм дискретной свѐртки (1.2.2) может быть реализован в форме ДПФ. Алгоритм дискретной свѐртки используется при вычислениях реакции линейных динамических систем.
Алгоритм цифровой фильтрации. Дискретное разностное уравнение
m |
|
k |
|
x(i) |
br x(i r) |
as y(i s) . |
(1.2.3) |
r 1 |
s |
0 |
|
представляет собой общее описание алгоритма цифровой фильтрации в рекуррентном виде; y(i) – фильтруемый входной, x(i) – от-
фильтрованный выходной сигнал Далее будет пояснено, что алгоритм цифровой фильтрации
(1.2.3) может быть реализован в форме дискретной свѐртки. Алгоритмы цифровой фильтрации широко используются в решениях задач обработки дискретизованных сигналов для различных предметных областей.
19
1.3. Структура ССД
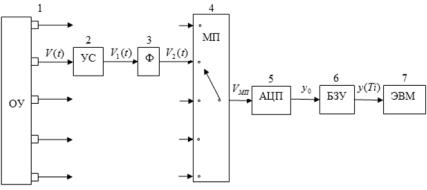
Структура ССД существенным образом определяет возможности проведения ЦОС. ССД состоит из системы датчиков, усилите-
лей, противомаскировочных фильтров, электронных коммутаторов, аналого-цифровых преобразователей и устройств буферной памяти. На рис.1.3.1 схематически изображѐн один из вариантов упрощѐнной конструкции ССД, цифрами отмечены основные элементы системы.
Рис. 1.3.1. Блок-схема системы сбора данных
1.3.1. Датчики CCД
Объекту управления (ОУ) в рамках ССД придаѐтся набор первичных информационных преобразователей – система датчиков, назначение которых состоит в преобразовании фазовых координат объекта в систему электрических сигналов – выходные на-
пряжения V (t) , в которых содержится информация о параметрах
объекта.
Каждому датчику ставится в соответствие функция преобразования, которая связывает значение величины x(t) со значением
напряжения V(t). Функции преобразования могут быть двух видов.
Для статических измерений связь между фазовыми координатами и выходными напряжениями реализуется в виде линейных или нелинейных функциональных зависимостей, соответствующих случаю статических функций преобразования. Для динамических измере-
20