

getmanov_v_g_cifrovaya_obrabotka_signalov_uchebnoe_posobie / getmanov_v_g_cifrovaya_obrabotka_signalov_uchebnoe_posobie
.pdfний связь между фазовыми координатами и выходными напряжениями реализуется в виде дифференциальных уравнений, соответствующих случаю динамических функций преобразования.
Как правило, точный вид функций преобразования почти всегда оказывается достаточно сложным; поэтому в качестве функций преобразования могут выступать их модели, приближѐнно описывающие связи между фазовыми координатами и выходными напряжениями. Функции преобразования или их модели используются для решения задач ЦОС.
Статические функции преобразования для датчиков устанавливают связь между входом и выходом в виде соотношений, которые являются нелинейными модельными функциями
V(t) g(x(t)). |
(1.3.1) |
Функции g( ) формируются на основе рассмотрения математиче-
ских моделей датчиков. Функции (1.3.1) определяют вид статических характеристик датчиков.
Для реальных датчиков разработана целая система вариантов модельных функций преобразования – статических характеристик. Рассмотрим некоторые из них, наиболее часто встречающиеся в практике ЦОС. Линейная статическая характеристика для датчика в виде функции V(t) a bx(t) является простейшим вариантом
статической связи. Статическая характеристика датчика в виде нелинейной функции V(t) g(x(t)) в некоторых случаях может пред-
ставляться графиком, изображѐнным на рис. 1.3.2. Условие 0 x(t) xнс определяет рабочий диапазон датчика, точка xнс определяет границу области насыщения.
Рис. 1.3.2. Модельная статическая функция преобразования датчика
21

Описание функционирования многих типов датчиков в ряде случаев не может основываться на статических соотношениях. Благодаря наличию инерционных частей, трения и других факторов конструкций реальных датчиков между измеряемой фазовой координатой и выходным сигналом могут иметь место зависимости более сложного вида, чем статические.
Достаточно часто, когда входная измеряемая фазовая координата x(t) и выходной сигнал V(t) являются функциями времени t
(иногда x(t) x может быть константой), следует учитывать дина-
мические свойства датчиков. Фукции преобразования для динамических датчиков устанавливают связи между входами и выходами в виде соотношений, которые являются модельными дифференциальными уравнениями. Указанные модельные дифференциальные уравнения формируются на основе рассмотрения математических моделей датчиков, которые базируются на уравнениях механики и электротехники.
В инженерных приложениях наиболее часто рассматриваются модельные линейные дифференциальные уравнения первого и второго порядка, соответствующие линейным динамическим датчикам и определяющие динамические функции преобразования. Для практики ЦОС целесообразно рассмотреть два наиболее часто встречающихся вида линейных дифференциальных уравнений, связывающих в динамике измеряемые фазовые координаты x(t) и
выходные сигналы V(t) .
Датчикам с апериодическими функциями преобразования ставятся в соответствие модельные линейные дифференциальные уравнения первого порядка
V(t) |
1 |
V(t) |
k0 |
x(t), |
(1.3.2) |
|
|
||||
|
T |
T |
|
|
|
где T – постоянная времени, обусловливающая его инерционность; k0 – коэффициент усиления. Датчики с колебательными функция-
ми преобразования описываются модельными линейными дифференциальными уравнениями второго порядка
V(t) 2 V(t) |
2V(t) |
2k x(t). |
(1.3.3) |
|
0 |
0 |
0 |
0 |
|
|
22 |
|
|
|
Значения параметров , |
2 |
и k |
определяют динамические свой- |
|||
|
0 |
0 |
|
|
|
|
ства датчиков. Сочетание |
параметров |
2 |
2 |
0 соответствует |
||
|
0 |
|||||
|
|
|
|
|
|
|
колебательным функциям преобразования.
Линейным динамическим датчикам ставятся в соответствие передаточные функции. Эти характеристики позволяют производить анализ динамических свойств и погрешностей линейных динамических датчиков. Передаточные функции определяются на основе применения преобразований Лапласа для функций времени x(t), V(t):
Х ( р) |
х( )е р d , V ( р) V ( )е р d , |
0 |
0 |
p – комплексный параметр. Передаточные функции H( p) для ли-
нейных динамических датчиков определяют связь между входом и выходом при нулевых начальных условиях следующим образом:
V(p) H( p)X( p) .
Для апериодических и колебательных динамических измерительных преобразователей (1.3.2), (1.3.3) передаточные функции записываются в виде полиномов от переменной p:
|
|
k |
|
|
|
|
|
2k |
|
|
|
|
H1( p) |
0 |
|
, |
H2 ( p) |
|
|
0 |
0 |
|
. |
|
Tp |
1 |
|
p2 |
2 p |
2 |
|||||
|
|
|
|
|
|
|
|
|
|
0 |
|
Для p j |
выражения X( j |
), V( j |
) представляют собой пре- |
||||||||
образования |
Фурье для |
функций времени |
|
x(t), V(t). Функция |
|||||||
H( j ) в этом случае для линейных динамических датчиков определяет связь входов и выходов в частотной области:
V( j ) H( j )X( j ) .
Функция H( jω) является комплексной функцией частоты, которую можно представить в экспоненциальном виде:
H( jω) H( j ) e j ( ) ,
где H( j ) – амплитудно-частотная характеристика (АЧХ); ( ) – фазочастотная характеристика (ФЧХ) для линейных дина-
мических датчиков. Функции АЧХ и ФЧХ позволяют определить
23

амплитудные и фазовые искажения в зависимости от частоты для линейных динамических датчиков, когда эталонная величина x(t) изменяется по гармоническому закону в соответствии с формулой
x(t) X cos t,
для которой заданы X – амплитуда; – частота. Общеизвестно, что значение сигнала V(t) для линейного динамического измеритель-
ного преобразователя в установившемся режиме в этом случае также будет описываться гармонической функцией
V(t) V cos( t |
) , |
где V – амплитуда измеренного сигнала; |
– фазовый сдвиг между |
синусоидальной выходной и входной функциями. С помощью функций АЧХ и ФЧХ H( jω) и ( ) можно оценивать ампли-
тудные и фазовые искажения, вносимые динамическим измерительным преобразователем. Для заданной частоты амплитудное и фазовой искажение V / X и между измерительным сигналом и измеряемой величиной определяются следующим образом:
V |
|
H( j ) |
|
, |
( ) . |
|
|
||||
X |
|
|
|||
|
|
|
|
|
Рассмотрим более детально конструкцию и характеристики одного из вариантов датчиков виброускорений. На рис. 1.3.3 представлен схематический чертѐж электромеханической конструкции пьезоакселерометра. Действие пьезоэлектрических датчиков виброускорений основано на использовании прямого пьезоэффекта – свойства некоторых материалов (пьезоэлектриков) генерировать электрический заряд под действием приложенной к ним механической силы. Инерционный элемент 3 прикреплѐн к верхней грани пьезоэлемента 2, а нижняя грань пьезоэлемента прикреплена к корпусу 1, пружина 4 воздействует на верхнюю поверхность инерционного элемента. При установке датчика на исследуемом объекте эта система воспринимает его вибрацию. Выходом пьезоэлектрического датчика является напряжение V(t), снимаемое с пьезоэле-
мента.
24
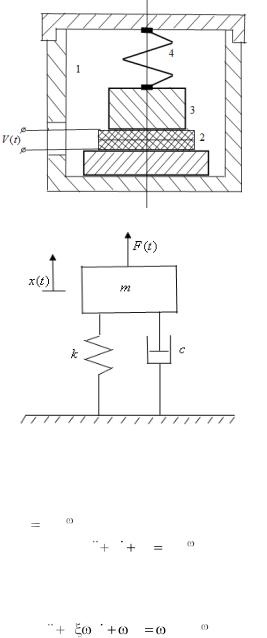
Рис. 1.3.3. Схематический чертѐж конструкции пьезоакселерометра
Рис. 1.3.4. Схема механической модели пьезоакселерометра
Упрощѐнная схема механической модели этого датчика приведена на рис. 1.3.4. Дифференциальное уравнение для смещения x(t) инерционного элемента под действием комплексной гармони-
ческой силы F(t) Fe j t , имеет вид
mx cx kx Fe j t ,
где m, c, k определяют параметр массы, коэффициент демпфирования и коэффициент упругости. От данного уравнения можно перейти к дифференциальному уравнению вида
x 2 |
0 |
x |
2x |
2 F e j t , |
|
|
|
0 |
0 |
k |
|
|
|
|
|
|
|
25
где |
2 |
k/m, |
c/2m 0 . Положим, что установившееся решение |
0 |
этого дифференциального уравнения имеет вид x(t) Xe j t , где
X – комплексная амплитуда. После подстановки x |
|
Xe j t |
получим |
|||||||||||
выражение для амплитуды |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
2 |
|
F |
|
1 |
|
|
|
F |
|
|
|
X |
|
|
0 |
|
|
|
|
. |
(1.3.4) |
|||||
2 |
2 |
j2 |
|
k |
2 |
|
|
|
k |
|||||
|
|
|
|
|
|
|
||||||||
|
0 |
|
0 |
j2 |
|
|
|
|
|
|||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
||
С использованием (1.3.4) сформируем передаточную функцию H0 ( j ) , связывающую в частотной области амплитуду X с амплитудой силы F:
H ( j ) |
X |
|
|
|
1 |
|
1 . |
(1.3.5) |
||
|
|
|||||||||
0 |
F |
2 |
|
|
|
k |
|
|||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
j2 |
|
|
|
|
||
|
|
|
|
|
||||||
|
0 |
|
0 |
|
|
|
||||
Выделим в передаточной функции (1.3.5) действительную и мнимую часть
|
2 |
2 |
1 |
j |
H0 ( j ) |
|
0 |
|
|
|
|
|
|
|
0 |
|
|
. |
|||
2 |
2 |
|
2 |
2 |
2 |
2 |
2 |
|
||||||||
|
2 |
|
|
|||||||||||||
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
0 |
|
|
|
0 |
|
0 |
|
|
|
0 |
|
|
||||
На основе формул для действительной и мнимой частей представим выражения для АЧХ 
 и ФЧХ ( ) рассматриваемого пьезоакселерометра:
и ФЧХ ( ) рассматриваемого пьезоакселерометра:
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||
|
H0 ( j ) |
|
2 |
|
|
|
1 |
|
|
|
, ( ) arctg |
0 |
. |
||||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
2 |
|
|
|
|
2 |
|
||||||
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
0 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Поскольку выходное напряжение V(t) и смещение x(t), |
ускорение |
||||||||||||||||
a(t) и возбуждающая сила F(t) связаны линейными зависимостями V(t) kv x(t), a(t) kaF(t), то передаточная функция пьезоакселерометрического датчика, связывающая V(t) и a(t) представится очевидным образом:
26
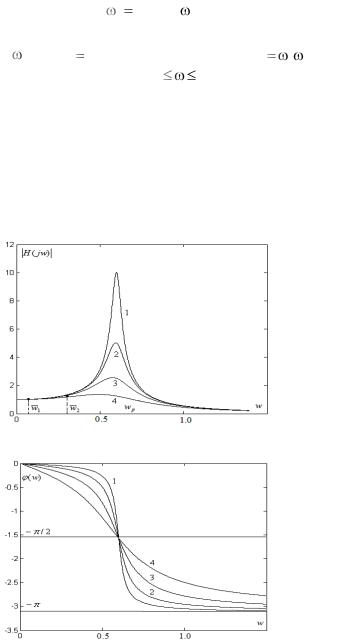
H( j ) k0H0 ( j ) .
На рис. 1.3.5а–1.3.5б изображены АЧХ и ФЧХ передаточной
функции H( j ) для k0 |
1 и относительных частот w |
/ 0 . |
||||
Рабочий частотный |
диапазон |
|
1 |
|
2 для таких |
датчиков |
w |
w |
|||||
соответствует почти плоскому участку АЧХ; при выборе рабочего диапазона следует учитывать величину фазового запаздывания ФЧХ. АЧХ пьезоакселерометров содержат области, примыкающие к резонансной частоте wp .
Перечисленные сведения по частотным характеристикам присущи почти всем видам датчиков практически независимо от их физической природы. Здесь не конкретизируется возможный перечень типов датчиков, применяемых в системах ЦОС.
Рис. 1.3.5а. АЧХ передаточной функции пьезоакселерометра
Рис. 1.3.5б. ФЧХ передаточной функции пьезоакселерометра
27

1.3.2.Усилители, противомаскировочные фильтры, электронные коммутаторы
Выходные электрические сигналы V(t) от датчиков поступают на входы системы широкополосных усилителей (УС) с коэффициентами усиления K1; назначение данных усилителей cостоит в обеспечении усиления входных сигналов до стандартного значения: K1V (t) V1(t) , V1(t) V1 , чаще всего V1 1 В. Частотные характеристики передаточной функции для УС должны быть подобраны таким образом, чтобы для входного сигнала V(t) в заданном час-
тотном диапазоне амплитудные и фазовые искажения были незначительными.
На вход аналогового противомаскировочного фильтра подаѐтся сигнал V1(t), выходной сигнал фильтра обозначается в виде V2 (t). Низкочастотные аналоговые фильтры (непропускающие высокие
частоты) |
с передаточными функциями ( j |
) |
обеспечивают уст- |
ранение |
высокочастотных составляющих |
в |
выходном сигнале |
V2 (t). Подобная аналоговая фильтрация необходима для согласования частоты последующей дискретизации и верхней частоты сигнала V2 (t). Физическое содержание процесса противомаскиро-
вочной фильтрации будет прояснено в разд. 3.4, в котором будут рассмотрены вопросы дискретизации сигналов.
Для противомаскировочного фильтра АЧХ имеет вид, изобра-
женный на рис. 1.3.6, где параметр с – частота среза фильтра, |
|||||||
удовлетворяет условию |
|
( j c |
|
2 |
1/ 2 . Как правило, для противо- |
||
|
|
||||||
|
|
|
|||||
маскировочных фильтров их АЧХ в точке среза |
с |
должны иметь |
|||||
|
|
|
|
|
|
|
|
большую крутизну. Вследствие чего в рабочей полосе частот
(0, c ) |
коэффициент усиления фильтра должен быть примерно |
||||||||
равен 1, |
в высокочастотной области ( c , ) |
коэффициент усиле- |
|||||||
ния фильтра должен быть близок к нулю: |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
( j ) |
1, 0 |
c ; |
( j ) |
0 , |
c |
. |
|
Частота среза |
c |
аналогового фильтра обычно регулируется в за- |
|||||||
|
|
|
|
|
|
|
|
|
|
висимости от полосы исходного сигнала (его частотных свойств) и
28
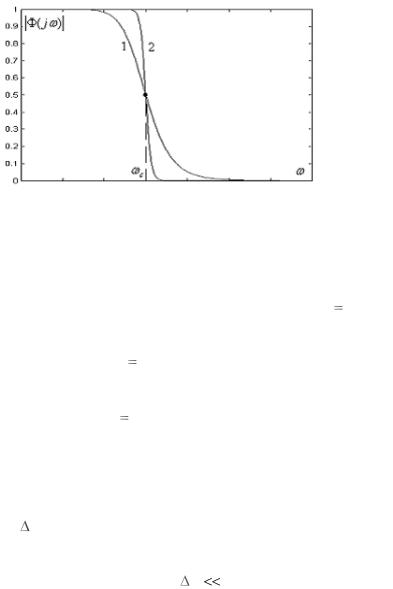
заданной частоты дискретизации. Линии 1 и 2 АЧХ на рис. 1.3.6 отличаются крутизной.
Рис. 1.3.6. АЧХ противомаскировочного фильтра
Выход противомаскировочного фильтра V2 (t) фактически явля-
ется информационным сигналом, который далее подвергается дискретизации.
Электронный коммутатор (мультиплексор) реализует переключение измерительных каналов с частотой дискретизации fd 1/ T,
T – интервал временной дискретизации. На вход электронного коммутатора поступают аналоговые сигналы от противомаскировочных фильтров V2i (t), i 1,..., n, n – число информационных
каналов ССД (по числу датчиков). На единственном выходе электронного коммутатора формируется последовательность кусочнопостоянных сигналов VМП VМП (t), которая подаѐтся на устройст-
во дискретизации.
Пример временной диаграммы работы электронного коммутатора для трѐх информационных входных каналов, на которые подаются напряжения V21(t), V22 (t), V23(t) , приведѐн на рис. 1.3.7.
С временным шагом дискретизации T происходит запоминание на время tk (время коммутации) соответствующего кусочно-
постоянного напряжения, которое предназначено для подачи в устройство дискретизации. Для работы электронного коммутатора должно выполняться соотношение n tк T.
29
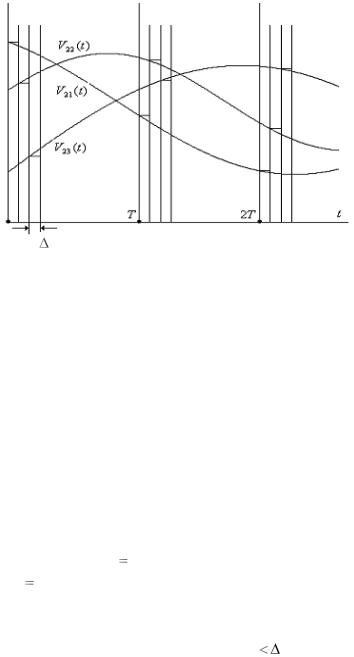
VМП (t)
tк
Рис. 1.3.7. Временная диаграмма работы электронного коммутатора
Для некоторых задач цифровой обработки при многоканальном вводе высокочастотных сигналов необходимо учитывать фазовые сдвиги для информации в дискретизованных сигналах, которые вносятся при работе по предлагаемой схеме.
Следует отметить, что использование в ССД электронного коммутатора не является обязательным; его применение диктуется в ряде случаев требованием уменьшения аппаратурных затрат для снижения числа микросхем АЦП или, например, для обеспечения идентичности дискретизации по различным каналам. Вполне возможно построение ССД без электронного коммутатора с использованием в каждом канале отдельных микросхем АЦП.
1.3.3. Аналого-цифровые преобразователи
Аналого-цифровые преобразователи (АЦП) осуществляют преобразование последовательности кусочно-постоянных напряжений от мультиплексора VМП VМП (t) в последовательность цифровых
кодов у0 y0 (Ti) . Следует отметить существенные параметры АЦП для формирования систем ЦОС: 1) tАЦП – время преобразования АЦП аналогового напряжения V2i (t) в цифровой код; оче-
видно, должно выполняться неравенство tАЦП |
tk ; 2) LA – число |
30 |
|