

getmanov_v_g_cifrovaya_obrabotka_signalov_uchebnoe_posobie / getmanov_v_g_cifrovaya_obrabotka_signalov_uchebnoe_posobie
.pdfИз рис. 6.5.3а и 6.5.3б видно, что в результате применения окна Блэкмана практически полностью устраняются пульсации в полосе пропускания и уровень пульсаций в полосе задерживания снижается до 80 Дб.
6.5.4. Синтез КИХ-фильтров методом частотных выборок
Продолжим рассмотрение задачи построения КИХ-фильтров в частотной области. Передаточная функция КИХ-фильтров внешне напоминает дискретное преобразование Фурье. Воспользуемся этим обстоятельством при решении задачи синтеза. Действительно, запишем снова выражение ПФ
|
|
|
k |
|
|
|
H(a, j T) |
a e j Ts. |
|
|
|
|
s |
|
|
|
s |
0 |
|
|
Расположим частотные точки равномерно |
r ; r 0, 1,..., k; |
||
r |
r; |
2 /(k 1). Пусть комплексные значения H0 ( j rT) |
||
задают эталонную ПФ для КИХ-фильтра в равномерно расположенных дискретных частотных точках. Введѐм нормированные частотные выборки H0,r H0 ( j rT)/(k 1). Очевидно, что после-
довательности частотных выборок H0,r и коэффициенты as связаны прямым и обратным дискретным преобразованием Фурье:
|
|
|
|
|
|
|
1 |
|
k |
|
j |
2 |
|
rs |
|
|
|
|
|
|
|
|
||
|
H |
|
|
|
|
|
|
|
a e |
|
|
k |
1 |
|
, |
r |
|
0, 1,..., k, |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
0,r |
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
k |
|
1s 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
k |
|
|
|
j |
2 |
rs |
|
k H |
|
( j |
|
|
T ) |
|
j |
2 |
|
rs |
|
|
||||
a |
H |
0,r |
e |
|
N |
|
|
|
|
0 |
|
|
|
r |
|
|
e |
|
k |
1 |
, |
s 0, 1,..., k. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
s |
|
|
|
|
|
|
|
|
|
|
k |
1 |
|
|
|
|
|
|
|
|
|
|||
r |
0 |
|
|
|
|
|
|
|
r 0 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
На практике решение задачи синтеза КИХ-фильтров практически всегда связано с тем, что требуется синтезировать АЧХ заданного вида с помощью КИХ-фильтра с действительными коэффициентами as . Воспользуемся подходом разд. 6.5.2, основанным на
формировании КИХ-фильтров с линейными ФЧХ.
Рассмотрим пример задачи синтеза с k-нечѐтным. Сформируем
симметричную АЧХ Hr , r 0,..., |
k, Hr Hk 1 r , |
которая соот- |
ветствует в точках r 0, 1,..., (k |
1) / 2 значениям |
заданной эта- |
221 |
|
|
лонной Hr |
H0,r |
. |
Тогда коэффициенты КИХ-фильтра предста- |
|||||||||||||
вятся следующей формулой: |
|
|
|
|
|
|
|
|
||||||||
|
k |
|
|
j |
2 |
|
rs |
(k |
1)/2 |
|
|
2 |
|
|
|
|
a |
H |
e |
|
k |
1 |
|
2H |
r |
cos |
|
|
|
rs , |
|||
|
|
|
|
|
||||||||||||
s |
r |
|
|
|
|
|
|
|
|
k |
1 |
|
||||
|
r 0 |
|
|
|
|
|
|
r |
0 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
s |
0,..., |
(k |
1)/2, as ak 1 s. |
|
|
|
|||||||||
Нетрудно видеть, что симметричные коэффициенты as являются действительными.
6.5.5.Синтез КИХ-фильтров по методу аппроксимации во временной области
Данный метод синтеза основан на решении задачи аппроксимации во временной области наблюдений сигнала на ограниченном числе дискретных точек с помощью линейной по параметрам модели. Рассмотрим с учѐтом определѐнных допущений используемую здесь задачу аппроксимации и предлагаемый алгоритм синтеза.
Пусть задана выборка из (k 1) наблюдений сигнала y(s) y(Ts), s 0, 1,..., k. Аппроксимируем указанные наблюдения линейной по параметрам c1, c2,..., cm моделью в виде полиномиальной функции
|
|
m |
|
y (c,Ts) |
c (Ts)r 1. |
|
|
M |
|
r |
|
|
r 1 |
|
|
Cформируем квадратичный функционал |
|
||
|
k |
m |
2 |
|
|
||
S(c, y) |
y(s) |
c (Ts)r 1 . |
|
|
|
r |
|
s |
0 |
r 1 |
|
Решение задачи аппроксимации связано с вычислением оптималь-
ного вектора параметров c модели, который обеспечивает минимальное значение функционала, физический смысл которого очевиден. С помощью векторно-матричных обозначений вектора на-
блюдений Y и матрицы X 0 оптимальный вектор параметров c находится следующим образом:
222
|
y(0) |
|
|
|
1 |
T 0 |
(T 0)m 1 |
|
|
|
||
|
|
|
|
|
|
|
||||||
Y |
y(1) |
, |
X |
|
1 |
T |
1 |
(T 1)m 1 |
, c (XT X |
|
) 1 XTY. |
|
|
0 |
|
|
|
|
|
0 |
|||||
|
|
|
|
|
|
|
|
|
0 |
0 |
||
|
y(k) |
|
|
|
1 |
T |
k |
(T k) |
m 1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Для того, чтобы избежать проблем с вычислениями, будем пола-
гать, что k, |
m принимают малые значения. |
|
|
||||||||||||
Введѐм матрицу D размерности (m, k |
1) и представим вектор |
||||||||||||||
c в виде линейной функции от вектора наблюдений |
|
||||||||||||||
|
|
|
|
|
c |
|
|
|
|
k |
|
|
|
|
|
D |
(XT X |
0 |
) 1 XT , |
DY, |
|
c |
d |
rs |
y(s), r 1,..., m, |
(6.5.16) |
|||||
|
0 |
|
0 |
|
|
|
|
|
r |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
s |
0 |
|
|
|
|
где drs , r 1,..., m, |
s |
0, 1,..., |
k, |
– коэффициенты матрицы D. Мо- |
|||||||||||
дель |
сигнала |
для |
вектора параметров c в некоторой |
точке i, |
|||||||||||
0 i |
k, может быть найдена в виде линейной комбинации на- |
||||||||||||||
блюдений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
m |
k |
|
|
|
|
|
|
y (c , Ti) |
|
c (Ti)r 1 |
|
|
d |
rs |
y(s) (Ti)r 1 |
|
||||||
|
M |
|
|
|
r |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
r |
1 |
|
|
|
r 1 |
s 0 |
|
|
|
|
|
|
|
|
|
|
k |
m |
|
|
(Ti)r 1 y(s). |
|
||||
|
|
|
|
|
|
|
d |
rs |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s 0 |
r 1 |
|
|
|
|
|
|
|
|
Точка i в общем случае не связана со значением k; рассмотрим ча-
стный случай i |
k. Введѐм коэффициенты ak s , |
s |
0, 1,..., k, и |
||||
представим значение модели сигнала в точке k в виде свѐртки |
|||||||
m |
(Tk)r 1 a |
|
|
|
k |
|
|
d |
s |
, |
y (c , Tk) |
a |
y(s). |
(6.5.17) |
|
rs |
k |
|
M |
k s |
|
|
|
r 1 |
|
|
|
s |
0 |
|
|
Примем yM(c , Tk) в качестве результата фильтрации наблюдений y(0), y(1),..., y(k) для точки k, введѐм обозначение x(k):
k |
|
k |
yM(c , Tk) x(k) , x(k) |
ak s y(s) |
as y(k s). (6.5.18) |
s 0 |
s |
0 |
Основываясь на выражении (6.5.18), можно сформировать КИХфильтр. Положим, что последовательность наблюдений сигнала y(i) реализована для k i . Результат фильтрации сигнала
x(i) в точке i, полученный на основе скользящего усреднения на-
223
блюдений y(i), y(i 1),..., y(i k) |
для 0 |
i |
, представляется со- |
||
отношением |
|
|
|
|
|
|
k |
|
|
|
|
x(i) |
as y(i |
s), i |
0, 1, |
2,.. . |
(6.5.19) |
s |
0 |
|
|
|
|
Алгоритм синтеза КИХ-фильтра во временной области базируется на соотношении (6.5.16), которое позволяет вычислить по T, k, m коэффициенты drs матрицы D, и соотношении (6.5.17), на
основе которого может быть вычислен вектор as (или ak s ).
Разберѐм пример синтеза КИХ-фильтра во временной области по трѐм наблюдениям y(0), y(1), y(2), которые соответствуют
k 2. В качестве аппроксимационной модели выбираем прямую линию yM (c, Ts) c1 c2Ts, s 0, 1, 2. Введѐм векторно-матрич-
ные обозначения Y, X0 и произведѐм необходимые вычисления, положив T 1. Опустив промежуточные выкладки, получим
|
y(0) |
|
|
1 |
0 |
|
|
|
|
|
|
|
|
|
|||
Y |
y(1) |
, X |
0 |
1 |
T |
, D (XT X |
) 1 XT |
|
|
|
|
|
|
0 |
0 |
0 |
|
|
y(2) |
|
|
1 |
2T |
|
|
|
5 |
1 |
1 |
|
|
|||
6 |
3 |
6 |
. |
1 |
0 |
1 |
|
2 |
2 |
|
|
|
|
Оптимальные коэффициенты модели примут вид
с |
5 y(0) 1 y(1) |
1 y(2), |
c |
1 y(0) |
1 y(2). |
|
1 |
6 |
3 |
6 |
2 |
2 |
2 |
|
|
|||||
Значение модели в точке s |
2 представится следующим образом: |
|||||
x(2) |
y |
(c , 2) c |
2c |
1 y(0) |
1 y(1) |
5 y(2). (6.5.20) |
|
M |
1 |
2 |
6 |
3 |
6 |
|
|
|
|
|||
Уравнение КИХ-фильтра, реализующего скользящее усреднение, и его коэффициенты запишутся на основании (6.1.20):
x(i) 5 y(i) |
1 y(i 1) |
1 y(i 2), a |
5 , a |
1 , a |
1 . (6.5.21) |
|||
6 |
3 |
6 |
0 |
6 |
1 |
3 |
2 |
6 |
|
|
|
||||||
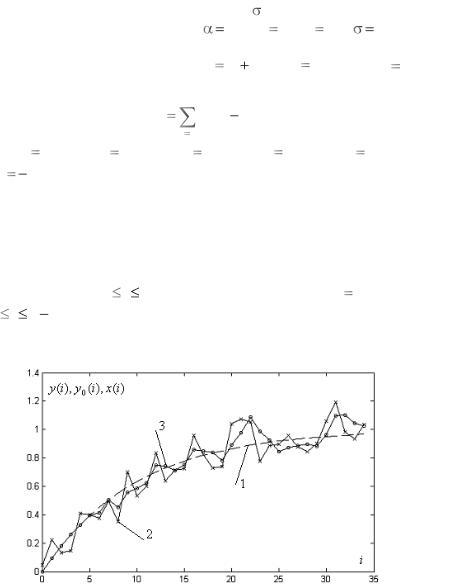
На рис. 6.5.4 представлены результаты математического моделирования работы КИХ-фильтра, синтезированного по предлагае-
мому |
алгоритму. |
Модельные зашумленные |
наблюдения |
|
y(i) |
y(Ti) с i 0, 1,..., N |
1 формируются по формуле |
||
|
y(i) |
y (i) |
w(i), y (i) 1 e T(i 1) , |
(6.5.22) |
|
|
0 |
0 |
|
|
|
|
224 |
|
где w(i) – модельные случайные нормальные числа с нулевым ма-
тематическим ожиданием и дисперсией |
2. |
Для (6.5.22) |
приняты |
|
численные значения параметров |
0,1; |
T |
1; N 35; |
0,1. В |
качестве модельной функции, реализующей аппроксимацию на-
блюдений, взята прямая yM (c, Ts) c1 |
c2Тs, |
s 0, 1,..., k, k 5. |
|
Уравнение КИХ-фильтра представится следующей формулой: |
|||
5 |
|
|
|
x(i) |
as y(i s), |
|
|
s |
0 |
|
|
где a0 0,5238; a1 0,3810; a2 |
0,2381; |
a3 |
0,0952; a4 0,0476; |
a5 0,1905 – значения его вычисленных по (6.5.16) и (6.5.17) ко-
эффициентов.
Пунктирная кривая 1 относится к исходному экспоненциальному сигналу y0 (i), ломаная линия 2 с крестиками соответствует зашумлѐнным наблюдениям y(i), ломаная линия с кружочками обозначает выходной сигнал фильтра x(i). Вычисления x(i) реализо-
ваны |
для точек k i N; на кривой 3 принято x(i) y0 (i) для |
0 i |
k 1. Анализ кривых на рис. 6.5.4 позволяет сделать вывод, |
что описанный метод синтеза КИХ-фильтров на основе аппроксимации во временной области является вполне работоспособным.
Рис. 6.5.4. Результаты математического моделирования работы КИХ-фильтра, синтезированного по методу аппроксимации во временной области
225
Список вопросов для самопроверки к гл. 6
1.В чѐм состоит определение для разностных уравнений ЦФ?
2.Могут ли быть определены импульсно-переходные функции для нелинейных ЦФ?
3.В чѐм состоит физический смысл определения передаточных функций ЦФ?
4.Влияет на характер устойчивости ЦФ расположение на комплексной плоскости его нулей?
5.Какие этапы можно определить при решении задачи синтеза ЦФ на основе аппроксимации?
6.Какие этапы можно определить при решении задачи синтеза ЦФ на основе билинейного преобразования?
7.В чѐм состоят постановка и основные этапы задачи синтеза ЦФ Баттерворта?
8.В чѐм состоят постановка и основные этапы задачи синтеза КИХ-фильтров с помощью оптимизации в частотной области?
9.В чѐм состоят постановка и основные этапы задачи синтеза КИХ-фильтров с использованием ДПФ?
Список задач к гл. 6
1. Основные формулы для цифровых фильтров
|
|
|
|
|
|
|
k |
a z s |
|
|
|
|
|
|
|
|
|
|
|
|
m |
k |
|
|
|
|
s |
|
|
|
|
|
s 0 |
|
|
||||
x(n) |
b x(n r) |
a y(n s), H(z 1) |
|
|
, |
||||
|
|
m |
|||||||
|
r |
s |
|
|
|
|
|||
|
r 1 |
s 0 |
|
1 |
|
b z r |
|
||
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
r |
1 |
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
a e j |
Ts |
|
|
||
|
|
|
|
s |
|
|
|
|
|
|
z 1 e j T , |
H( j T ) |
|
s 0 |
|
. |
|
|
|
|
|
m |
|
|
|
||||
|
|
|
|
j Tr |
|
|
|||
|
|
1 |
b e |
|
|
||||
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
r 1 |
|
|
|
|
|
2. Записать выражение для передаточной функции ЦФ, основываясь на разностных уравнениях:
1) x(n) 1,3x(n 1) 3,5x(n 2) 5x(n 3) 1,5y(n) 2y(n 1) 3y(n 3);
226

2) |
x(n) 13x(n 2) |
3x(n |
3) 12y(n |
1) |
4y(n |
2); |
|
3) |
x(n) |
2y(n 1) |
4y(n |
2) 5y(n |
3) |
10y(n |
4); |
4) x(n) |
3x(n 1) 5x(n 3) 12y(n). |
|
|
|
|||
3. Записать выражение для разностных уравнений ЦФ, заданных передаточными функциями:
1) |
H(z |
1) |
|
|
|
1 |
1,5z 2 |
|
|
; |
|||
1 |
5z 1 |
1,2z 2 |
0,3z 3 |
||||||||||
|
|
|
|
||||||||||
2) |
H(z |
1) |
1 |
1.5z 1 |
|
2z 2 |
3z |
3 |
; |
|
|||
|
1 |
2z 2 |
4z 3 |
6z 4 |
|
||||||||
|
|
|
|
|
|||||||||
3) |
H(z 1) |
2 |
z 1 3z |
2 |
|
|
|
|
|||||
|
|
1 5z 1 |
; |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||
4) |
H(z |
1) |
|
|
1 |
; |
|
|
|
|
|
|
|
1 |
z 1 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||
5) H(z 1) 1 2z 1 |
3z 2 |
4z 3. |
|
|
|
||||||||
4. Построить АЧХ для ЦФ, заданных разностными уравнениями:
1) |
x(n) x(n 1) y(n); |
||
2) |
x(n) |
x(n |
1) 0,5(y(n) y(n 1)); |
3) |
x(n) |
y(n) |
y(n 1); |
4)x(n)
5)x(n)
6)x(n)
7)x(n)
8)x(n)
1 N 1
N s 0
y(n s);
12 (y(n) y(n 1));
13 (y(n) y(n 1) y(n 2)); b1x(n 1) a0 y(n);
b1x(n 1) b2x(n 2) a0 y(n).
227
СПИСОК ЛИТЕРАТУРЫ
1.Айчифер Э.С., Джервис Б.У. Цифровая обработка сигналов: практический подход. М.: Издательский дом «Вильямс», 2004. 992 с.
2.Баскаков С.И. Радиотехнические цепи и сигналы. Учебник для вузов. М.: Высшая школа, 2000. 448 с.
3.Бендат Дж., Пирсол А. Прикладной анализ случайных данных: пер. с англ. М.: Мир, 1989. 540 с.
4.Бендат Дж., Пирсол А. Применение корреляционного и спектрального анализа: пер. с англ. М.: Мир, 1983. 312 с.
5.Васильев В.П., Муро Э.Л., Смольский С.М. Основы теории и расчѐта цифровых фильтров. М.: ACADEMIA, 2007. 272 с.
6.Введение в цифровую фильтрацию / Под. ред. Р. Богнера и А. Константинидиса. М.: Мир, 1982. 216 с.
7.Гадзиковский В.И. Теоретические основы цифровой обработки сигналов. М.: Радио и связь, 2004. 344 с.
8.Гадзиковский В.И. Методы проектирования цифровых фильтров. М.: Горячая линия-Телеком, 2007. 416 с.
9.Гетманов В.Г. Цифровая обработка сигналов. М.: МИФИ, 1997. 128 с.
10.Голд Б., Рейдер Ч. Цифровая обработка сигналов. М.: Сов.
радио, 1973. 368 с.
11.Гольденберг Л.М., Матюшкин Б.Д., Поляк М.Н. Цифровая обработка сигналов. М.: Радио и связь, 1990. 224 с.
12.Гоноровский И.С., Дѐмин М.П. Радиотехнические цепи и сигналы. Учебник для вузов. М.: Радио и связь, 1994. 512 с.
13.Каппелини В., Константинидис А. Дж., Эмилиани П. Цифровые фильтры и их применение. М.: Энергоатомиздат, 1983. 360 с.
14.Лайонс Р. Цифровая обработка сигналов. М.: ООО «Бином-
Пресс», 2006. 656 с.
15.Лэй Э. Цифровая обработка сигналов для инженеров и технических специалистов. М.: ООО «Группа ИДТ», 2007. 336 с.
16.Макс Ж. Методы и техника обработки сигналов при физических измерениях. В 2-х т. М.: Мир, 1983. Т.1. 251 с.; Т.2. 256 с.
17.Оппенгеймер А., Шафер Р. Цифровая обработка сигналов. М.: Техносфера, 2007. 856 с.
18.Отнес Р., Эноксон Л. Прикладной анализ временных рядов.
М.: Мир, 1982. 428 с.
228
19.Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. М.: Мир, 1978. 848 с.
20.Сергиенко А.Б. Цифровая обработка сигналов. СПб.: Питер, 2002. 608 с.
21.Сиберт У.М. Цепи, сигналы, системы. В 2-х ч.: пер. с англ.
М.: Мир, 1988.
22.Смит С. Цифровая обработка сигналов. Практическое руководство для инженеров и научных работников. М.: Изд-во Додэка ХХI, 2008. 720 с.
23.Солонина А.И., Улахович Д.А., Арбузов С.М., Соловьѐва Е.Б. Основы цифровой обработки сигналов. СПб.: БХВ-Петербург, 2005. 768 с.
24.Тьюки Дж. Анализ результатов наблюдения. М.: Мир, 1981.
567 с.
25.Умняшкин С.В. Теоретические основы цифровой обработки
ипредставления сигналов: Учебное пособие. М.: Инфра-М Форум, 2009. 304 с.
26.Хемминг Р.В. Цифровые фильтры / пер. с англ.; ред. пер. О.А. Потапов. М.: Недра, 1987. 221 с.
27.Химмельблау Д. Анализ процессов статистическими методами. М.: Мир, 1973. 959 с.
229

Виктор Григорьевич Гетманов
ЦИФРОВАЯ ОБРАБОТКА СИГНАЛОВ
Издание 2-е, расширенное и переработанное
Редактор М.В. Макарова
Компьютерная верстка С.В. Тялиной
Подписано в печать 28.07.2010 г. Формат 60 84 1/16.
Уч.-изд. л. 14,5. Печ. л. 14,5. Тираж 000 экз. Изд. № 042-1. Заказ № 000
Национальный исследовательский ядерный университет «МИФИ». 115409, Москва, Каширское ш., 31.
Типография НИЯУ МИФИ.
230