


161 |
|
6.5 The curvature tensor |
|
|
|
|
|
|
If we subtract these, we get the commutator of the covariant derivative operators α andβ , written in the same notation as we would employ in quantum mechanics:
[ α , β ]Vμ :=α β Vμ − β α Vμ |
|
= μνβ,α − μνα,β Vν . |
(6.75) |
The terms involving the second derivatives of Vμ drop out here, |
since |
Vμ,αβ = Vμ,βα . |
(6.76) |
[Let us pause to recall that Vμ,α is the partial derivative of the component Vμ, so by the laws of partial differentiation the partial derivatives must commute. On the other hand,
|
α Vμ is a component of the tensor |
|
V |
, and |
α |
β Vμ is a component of |
|
V |
: there is no |
|
|
|
|
|
|
|
reason (from differential calculus) why it must be symmetric on α and β. We have proved, by showing that Eq. (6.75) is nonzero, that the double covariant derivative generally is not symmetric.] Now, in this frame (where μαβ = 0 at P), we can compare Eq. (6.75) with Eq. (6.63) and see that at P
[ α , β ]Vμ = Rμναβ Vν . |
(6.77) |
Now, this is a valid tensor equation, so it is true in any coordinate system: the Riemann tensor gives the commutator of covariant derivatives. We can drop the restriction to locally inertial coordinates: they were simply a convenient way of arriving at a general tensor expression for the commutator. What this means is that in curved spaces, we must be
careful to know the order in which covariant derivatives are taken: they do not commute.
This can be extended to tensors of higher rank. For example, a 11 tensor has
[ α , β ]Fμν = Rμσ αβ Fσ ν + Rν σ αβ Fμσ . |
(6.78) |
That is, each index gets a Riemann tensor on it, and each one comes in with a + sign. (They must all have the same sign because raising and lowering indices with g is unaffected byα , since g = 0.)
Eq. (6.77) is closely related to our original derivation of the Riemann tensor from parallel-transport around loops, because the parallel-transport problem can be thought of
as computing, first the change of V in one direction, and then in another, followed by subtracting changes in the reverse order: this is what commuting covariant derivatives also does.
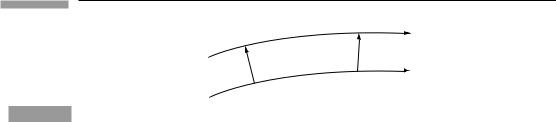
Geodesic deviation
We have often mentioned that in a curved space, parallel lines when extended do not remain parallel. This can now be formulated mathematically in terms of the Riemann tensor. Con-
sider |
|
|
) that begin parallel and near each other, |
two geodesics (with tangents V and V |
|||
as in |
Fig. 6.6, at points A and A . Let the affine parameter on the geodesics be called λ. |
||
163 |
|
6.6 Bianchi identities: Ricci |
and |
Einstein |
tensors |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Now, using α βγ = 0 at A, we have |
|
|
dλ ξ α |
+ α β0ξ β + 0 |
|
||||||||
|
|
|
|
|||||||||||
|
|
V V ξ α = dλ |
|
|||||||||||
|
|
|
|
d |
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
d2 |
|
|
|
|
|
|
|
|||
|
|
= |
|
ξ α + α β0,0ξ β |
|
|
(6.85) |
|||||||
|
|
dλ2 |
|
|
||||||||||
|
at A. (We have also used ξ β ,0 = 0 at A, which is the condition that curves begin parallel.) |
|||||||||||||
|
So we get |
|
|
|
|
|
|
μνβ V V ξ |
|
|
||||
|
|
V V ξ α = |
00β ξ |
|
|
, |
|
|||||||
|
|
|
α β0,0 |
− α 00,β |
ξ β |
|
(6.86) |
|||||||
|
= |
Rα |
|
|
|
β |
= |
Rα |
|
μ ν β |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
where the second equality follows from Eq. (6.63). The final expression is frame invariant, and A was an arbitrary point, so we have, in any basis,
V V ξ α = Rα μνβ VμVν ξ β . |
(6.87) |
Geodesics in flat space maintain their separation; those in curved spaces don’t. This is called the equation of geodesic deviation and shows mathematically that the tidal forces of a gravitational field (which cause trajectories of neighboring particles to diverge) can be represented by curvature of a spacetime in which particles follow geodesics.
6.6 B i a n c h i i d e n t i t i e s : R i cc i a n d E i n s t e i n t e n s o r s
Let us return to Eq. (6.63) for the Riemann tensor’s components. If we differentiate it with respect to xλ (just the partial derivative) and evaluate the result in locally inertial coordinates, we find
Rαβμν,λ = |
1 |
gαν,βμλ − gαμ,βνλ + gβμ,ανλ − gβν,αμλ . |
(6.88) |
2 |
From this equation, the symmetry gαβ = gβα and the fact that partial derivatives commute, we can show that
Rαβμν,λ + Rαβλμ,ν + Rαβνλ,μ = 0. |
(6.89) |
Since in our coordinates μαβ = 0 at this point, this equation is equivalent to |
|
|
|
Rαβμν;λ + Rαβλμ;ν + Rαβνλ;μ = 0. |
(6.90) |
|
|
But this is a tensor equation, valid in any system. It is called the Bianchi identities, and will be very important for our work.

164 |
Curved manifolds |
The Ricci tensor
Before pursuing the consequences of the Bianchi identities, we shall need to define the Ricci tensor Rαβ :
Rαβ := Rμσ μβ = Rβα . |
(6.91) |
It is the contraction of Rμανβ on the first and third indices. Other contractions would in principle also be possible: on the first and second, the first and fourth, etc. But because Rαβμν is antisymmetric on α and β and on μ and ν, all these contractions either vanish identically or reduce to ±Rαβ . Therefore the Ricci tensor is essentially the only contraction of the Riemann tensor. Note that Eq. (6.69) implies it is a symmetric tensor (Exer. 25, § 6.9).
Similarly, the Ricci scalar is defined as
R := gμν Rμν = gμν gαβ Rαμβν . |
(6.92) |
The Einstein tensor
Let us apply the Ricci contraction to the Bianchi identities, Eq. (6.90):
or |
gαμ "Rαβμν;λ + Rαβλμ;ν + Rαβνλ;μ |
# = 0 |
|
|
Rβν;λ + (−Rβλ;ν ) + Rμβνλ;μ = 0. |
(6.93) |
|
To derive this result we need two facts. First, by Eq. (6.31) we have |
|
||
|
gαβ;μ = 0. |
|
|
Since gαμ is a function only of gαβ it follows that |
|
|
|
|
gαβ ;μ = 0. |
|
(6.94) |
Therefore, gαμ and gβν can be taken in and out of covariant derivatives at will: indexraising and -lowering commutes with covariant differentiation. The second fact is that
gαμRαβλμ;ν = −gαμRαβμλ;ν = −Rβλ;ν , |
(6.95) |
accounting for the second term in Eq. (6.93). Eq. (6.93) is called the contracted Bianchi identities. A more useful equation is obtained by contracting again on the indices β and ν:
gβν "Rβν;λ − Rβλ;ν + Rμβνλ;μ# = 0
or
R;λ − Rμλ;μ + (−Rμλ;μ) = 0. |
(6.96) |