

Для определения постоянных интегрирования C1 и C2 необходимо
задать начальные условия для функции Ψ(t) . Однако они не могут зада-
C2 |
Ψ1(t) |
ваться независимо, так как их выбор |
tоднозначно определил бы какой-то процесс x(t) из всей совокупности и
-C1T |
|
при этом не были бы уточнены гра- |
||
|
ничные условия, которым этом про- |
|||
u*(t) |
|
цесс должен удовлетворять. |
||
+Umax |
|
Задача может быть решена до конца |
||
|
следующим образом. Считая управ- |
|||
0 |
t |
ляющее воздействием известным, ин- |
||
t1 |
тегрируют уравнение объекта управ- |
|||
-Umax |
||||
ления. Затем, используя граничные |
||||
|
||||
|
|
условия для координат, получают |
||
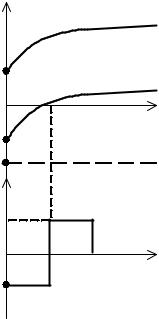
Рис. 7.10. Вид функций Ψ(t) и u (t) |
систему алгебраических уравнений и |
|||
неравенств, которая однозначно оп- |
||||
|
к примеру 7.5 |
ределяет параметры |
оптимального |
|
|
|
процесса. |
|
|
На основании рассмотренного |
примера можно заметить, |
что функцию |
||
x&0 = f0 , а следовательно, и Ψ0 (t) можно не включать в выражение для H, если
функционал не содержит в явном виде управления u, так как в этом случае слагаемое Ψ0 f0 не влияет на максимизацию H.
7.3.3. Принцип максимума в задачах о максимальном быстродействии. В
задачах о максимальном быстродействии минимизируемый функционал характеризует время перехода системы из состояния x(t0 ) в состояние x(t1) и имеет вид
t1 |
|
|
J (x, u) = ∫dt = t1 |
−t0 , |
(7.55) |
t0 |
|
|
афункция f0 (x,u) ≡1.
Сучётом (7.55) составим функцию H1 , равную
n
H1 = Ψ0 + ∑Ψi fi (x,u) . (7.56)
i =1
139

|
Так как на основании (7.50) |
dΨ0 |
= 0 и |
Ψ = Const , максимум |
H |
1 |
реализу- |
|
|
||||||
|
|
dt |
0 |
|
|
||
|
|
n |
|
|
|
||
|
|
|
|
|
|
|
|
ется одновременно с максимумом функции |
H = ∑Ψi fi (x,u) , а из требования |
||||||
Ψ0 |
≤ 0 и max H1 = 0 вытекает, что max H ≥ 0 . |
i =1 |
|
|
|
||
|
|
|
|
||||
|
u(t) U |
|
|
|
|
||
С учётом сказанного, принцип максимума для систем, оптимальных по быстродействию формулируется следующим образом.
Для оптимальности системы по быстродействию необходимо существование таких ненулевых непрерывных функций Ψ1(t),Ψ2 (t),...,Ψn (t) , что для всех
t [t0 ,t1] функция H переменных u1, u2 ,..., ur в заданной области их допустимых значений достигает максимума, т.е. H (Ψ, x,u) = max H , причём величина max H
u U |
u U |
постоянна во времени и max H ≥ 0 .
u U
Согласно приведенным формулировкам принцип максимума даёт только необходимые условия оптимальности. Вопрос о достаточности условий сложен, поэтому в практических приложениях заранее интуитивно предполагают достаточность по физическому смыслу исследуемой системы.
Пример 7.6. ОУ описывается системой уравнений x&1 = x2 , x&2 = u . Найти
управляющее воздействие, которое за минимальное время переведёт объект из произвольного начального состояния в равновесное x1 = 0; x2 = 0 , при этом
u ≤1.
Составим функцию H (Ψ, x,u) = Ψ1x2 + Ψ2u и определим максимум H по пе-
ременной u: dHdu = Ψ2 = 0 . Это равенство может выполняться только при нулевой функции Ψ2 (t) , поэтому максимум H достигается на границе области допусти-
мых |
управлений |
|
u |
|
=1. |
Для нахождения |
Ψ2 (t) |
|
|
воспользуемся уравнениями |
||||||
|
|
|
|
|||||||||||||
|
dΨi |
= −∂H : |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
dt |
∂xi |
|
|
dΨ2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
dΨ1 |
= − ∂H = 0, |
= − |
∂H |
= −Ψ , |
|||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
dt |
|
∂x1 |
dt |
|
∂x2 |
1 |
|||
|
|
|
|
|
|
|
|
|
|
|||||||
откуда Ψ1 = Const = C1 , Ψ2 = C2 −C1t . |
|
|
|
|
|
|
||||||||||
|
|
Оптимальное управление u = SignΨ |
= Sign(C |
2 |
−C t). |
|||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
1 |
|||||
140



H = |
k1u − x1 |
Ψ (t) + |
k2 x1 − x2 |
Ψ (t) +... + |
kn xn−1 − xn |
Ψ (t). |
(7.58) |
|
|
|
|||||
|
T1 |
1 |
T2 |
2 |
|
n |
|
|
|
|
Tn |
|
|||
Управление u , максимизирующее H, определим из равенства
∂∂H = K1 Ψ1(t) = 0. u T1
Равенство (7.59) возможно только при Ψ1(t) = 0 , в соответствии с этим для
максимума H необходимо, чтобы u =Umax при Ψ1(t) > 0 и u = −Umax при
Ψ1(t) < 0 , т.е.
u (t) =Umax SignΨ1(t) .
∂∂Hu может зависеть от нескольких или от суммы всех со-
ставляющих вектора Ψ(t) .
Для определения характера управляющего воздействия нужно знать, сколько раз функция Ψ1(t) меняет знак или, иначе говоря, сколько корней имеет функция
Ψ1(t) . При прохождении функции Ψ1(t) через нуль каждый раз будет происхо-
дить смена знака управляющего воздействия. Моменты смены знака управляющего воздействия называются моментами переключения.
А.А. Фельдбаум в 1953 г. доказал теорему об n-интервалах, которая позволяет определить вид оптимального управления, не анализируя функции Ψ1(t): ес-
ли ОУ описывается линейным дифференциальным уравнением n-го порядка с постоянными коэффициентами и корни его характеристического уравнения вещественные отрицательные или нулевые, то для оптимального управления необходимо и достаточно n-интервалов максимального значения управления Umax , а
знаки на интервалах должны чередоваться (n −1) раз.
В соответствии с теоремой об n-интервалах оптимальное управление для рассматриваемого ОУ (7.57) имеет вид, показанный на рис. 7.12.
Следует отметить, что теорема об n-интервалах указывает только форму оптимального процесса, но не даёт закона определения продолжительности интервалов постоянства и моментов переключения.
142