

Для повышения эффективности метода используется возможность растяжения и сжатия симплекса. При этом в выражении (4.23) Нелдер и Мид рекомендуют использовать α = 3 (растяжение) и α = 1,5 (сжатие), как показано на рис. 4.9.
4.2.2. Градиентные методы. Метод наискорейшего спуска. Градиентные методы основаны на использовании градиента целевой функции и носят итеративный характер, так как составляющие градиента оказываются нелинейными функциями управляемых переменных. Во всех методах итерационная процедура
поиска реализуется в соответствии |
с формулой xk +1 = xk + αk S k , где |
xk – текущее приближение к решению x* |
на k -м шаге; S k – направление движе- |
ния к точке xk ; αk – параметр, характеризующий длину шага. Различные методы
отличаются способом определения S k и αk на каждой итерации. Обычно αk находится из условия обеспечения экстремального значения функции F(x) в рас-
сматриваемом направлении S k , для чего используются алгоритмы одномерного поиска.
Далее везде предполагается, что F(x), F(x) и 2 F(x) существуют и
непрерывны.
В методе наискорейшего спуска направление движения при поиске минимума F(x) задается вектором антиградиента – F(x) функции F(x) в рассматри-
ваемой точке, т.е. итерационная процедура поиска реализуется в соответствии с выражением xk +1 = xk − αk F(xk ), где αk – параметр, характеризующий длину шага.
Составляющие вектора градиента в точке xk |
определяются значениями част- |
||||||||
ных производных первого порядка функции F(x) |
по соответствующим перемен- |
||||||||
ным, вычисленным в точке xk : |
|
|
|
|
|
|
|
|
|
|
∂F(xk ) |
; |
∂F(xk ) |
,......, |
∂F(xk ) |
||||
F(xk )T = |
∂x |
∂x |
|
∂x |
|
. |
|||
|
|
2 |
|
|
n |
|
|||
1 |
|
|
|
|
|
||||
Предполагается, что компоненты градиента могут быть записаны в аналитическом виде или с достаточно высокой точностью вычислены при помощи численных методов.
Выбор величины шага αk осуществляется путем решения задачи минимизации F(x) в направлении − F(x) с помощью одного из методов одномерного по-
иска. Если компоненты вектора градиента заданы аналитически, то значение αk , при котором достигается экстремум функции, может быть найдено из условия
F(xk +1)T F(xk ) = 0. Преимущество метода в том, что при переходе от шага к
68
шагу обеспечивается выполнение неравенства F(xk +1 ) ≤ F(xk ) , т.е. значение
функции цели улучшается.
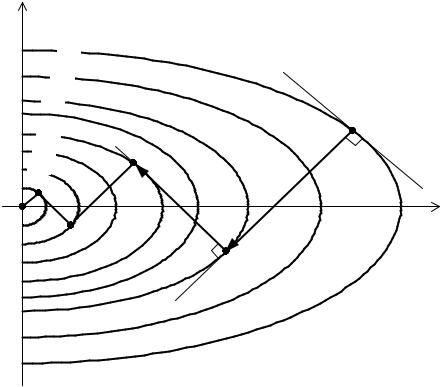
Графическая интерпретация метода наискорейшего спуска приведена на рис. 4.10. Здесь показаны линии уровня F = const выпуклой функции F(x1, x2 ) ,
минимальное значение которой находится в точке x* .
x2
F6
F5
F4
F3
F2
F1 x* x4
x3
F1<F2<F3<...
|
|
x0 |
|
x2 |
- |
0 |
) |
|
∆F(x |
||
-∆F(x1) |
|
|
x1 |
|
|
|
|
|
x1 |
|
|
Рис. 4.10. Графическая интерпретация метода наискорейшего спуска
Движение из начальной точки x0 осуществляется в направлении вектора −F(x0), который направлен по нормали к касательной, проведенной к линии уровня в рассматриваемой точке. Величина шага α0 выбирается из условия минимизации функции F(x) , которое обеспечивается в точке x1 , где осуществляется касание с одной из линий уровня. В точке x1 опять определяется наилучшее направление −F(x1) , которое должно быть направлено по нормали к касательной в точке x1 и соответственно будет перпендикулярно предыдущему направле-
нию движения. При этом переходим в очередную точку x2 и новое направление опять будет перпендикулярно предыдущему.
69
Последовательность точек x0 , x1 , x2 … сходится к точке минимума x* , при этом F(x0 ) > F(x1 ) > F(x2 ) … .Чем ближе линии уровня к окружности, тем луч-
ше сходится метод наискорейшего спуска. Метод медленно сходится в тех случаях, когда линии уровня сильно вытянуты и имеют так называемый овражный ха-
рактер. |
|
|
Блок-схема алгоритма метода наискорейшего |
спуска представлена на |
|
рис. 4.11. Здесь M – допустимое количество шагов, N – количество переменных, |
||
x0 – начальная точка, k – номер текущего шага, ε , ε |
2 |
– параметры окончания |
1 |
|
|
поиска.
Работа алгоритма завершается, когда норма вектора градиента 
 F(xk )
F(xk )
 или норма вектора
или норма вектора 
 xk+1 − xk
xk+1 − xk 
 становится достаточно малой. (Норма произвольного
становится достаточно малой. (Норма произвольного
n
вектора а определяется выражением a =  aT a = ∑ai2 .)
aT a = ∑ai2 .)
i=1
Скорость сходимости метода при решении некоторых задач является недопустимо низкой. Это связано с тем, что изменения переменных непосредственно зависят от величины градиента, которая стремится к нулю в окрестности точки минимума. Поэтому метод наискорейшего спуска эффективен при поиске на
значительных расстояниях от точки минимума x* и плохо работает в окре-
стности этой точки, он часто используется при реализации градиентных методов в качестве начальной процедуры.
В алгоритме MATLAB одномерный поиск происходит путем вычисления F в нескольких точках и использования полиномиальной интерполяции.
Пример 4.5. Найти максимальное значение |
функции |
F(x) =−2x2 |
+18x − |
||||||||||||||
|
|
|
+12x методом наискорейшего спуска, если x0 =[2; 1]. |
1 |
1 |
||||||||||||
−2x x |
−x2 |
|
|
||||||||||||||
1 |
2 |
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Находим составляющие вектора градиента функции |
|
|
|
||||||||||||||
|
|
|
|
∂F(x |
k |
) |
|
∂F(x |
k |
) |
|
= [− 4x +18 − 2x |
|
|
|
+12]. |
|
|
|
|
F(xk )Т = |
|
|
|
|
2 |
;−2x − 2x |
2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
∂x1 |
|
|
|
∂x2 |
|
|
|
1 |
1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Градиент функции в точке x0 будет F(x0 )Т =[8,6].
1-й шаг. Движение осуществляется из точки x0 вдоль вектора F(x0 ) в новую точку x1:
x1 |
x0 |
|
+ α0 |
8 |
2 |
+8α0 |
|
|
1 |
|
= 1 |
|
|
= |
+ 6α0 |
. |
|
x1 |
x0 |
|
|
6 |
1 |
|
||
2 |
|
2 |
|
|
|
|
|
|
70

Начало
Задать
|
M , N, x0, ε , ε |
2 |
|
|
||
|
|
1 |
|
|
|
|
|
Положить |
k = 0 |
|
|
||
|
Вычислить |
F(xk ) |
|
|
||
|
F(xk ) |
≤ ε1 |
? |
да |
Печать |
Конец |
|
|
|||||
|
|
|
|
|
результатов |
|
|
нет |
|
|
|
|
|
|
K≥M? |
|
да |
|
|
|
|
|
|
|
|
||
|
|
нет |
|
|
|
|
|
Вычислить |
αk |
|
на |
|
|
|
основе поиска вдоль |
|
|
|||
|
прямой, используя ε2 |
|
|
|||
|
Положить |
|
|
|
||
|
xk +1 = xk −αk F(xk ) |
|
|
|||
нет |
xk +1 − xk |
|
|
|
да |
|
k = k +1 |
|
xk |
≤ ε1 ? |
|
|
|
|
|
|
|
|
|
|
Рис. 4.11. Блок-схема алгоритма метода наискорейшего спуска
Величину шага α0 найдем из условия:
F (x1 )T F(x0 ) = [−4(2 +8α0 ) +18 − 2(1 + 6α0 ); − 2(2 +8α0 ) − 2(1 + 6α0 ) +12] |
8 |
= |
|||
|
|||||
= [8 − 44α0 ; 6 − 28α0 ] 8 |
|
|
|
6 |
|
|
=100 −520α0 |
= 0, |
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
71
откуда α0 = 0,192. |
|
|
|
|
|
|
|
|
|
|
|
|
||
В результате |
|
координаты |
точки x1 |
получаются |
равными x1 = 2 + 8α0 = |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
= 2 + 8·0,192 = 3,54; x12 = 1 + 6α0 |
= 1 + 6 0,192 = 2,15. |
|
|
|
|
|||||||||
2-й |
шаг. |
|
Движение |
осуществляется |
в |
|
направлении |
вектора |
||||||
F(x1)Т =[−0,46; |
0,62] . Координаты очередной точки |
x2 определяются выраже- |
||||||||||||
нием |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
2 |
|
|
3,54 |
|
− 0,46 |
3,54 |
− |
0 ,46 |
α1 |
|
||
|
1 |
|
= |
2,15 |
+ α1 |
= |
|
|
+ |
0,62 |
. |
|
||
|
x |
2 |
|
|
|
0,62 |
|
2,15 |
α1 |
|
||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
Величину шага α1 найдем следующим образом: |
|
|
|
|
|
|||||||||
|
F ( x 2 ) T |
F ( x1 ) = [−4(3,54 − 0,46 α1 ) + 18 − 2(2,15 + 0,62 α1 ); |
|
|||||||||||
− 2(3,54 − 0,46 α1 ) − 2(2,15 + 0,62 α1 ) + 12 ] − 0,46 |
= −0,594 − 0,474 α1 |
= 0, |
||||||||||||
|
|
|
|
|
|
|
|
|
0,62 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
откуда α1 = 1,25 и |
x2 |
= 2,965; x2 |
= 2,92. |
|
|
|
|
|
|
|
||||
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
Составляющие вектора F(x2 ) определяются следующими значениями:F(x2 )Т = [0,32; 0,24]. Для нахождения точки экстремума следует сделать ещё один шаг, в результате которого истинная точка экстремума определится коорди-
натами x* = [3, 3], Fmax = 45.
В общем случае процедура поиска продолжается до тех пор, пока все составляющие вектора градиента не станут достаточно малыми, т.е.
F(xk ) = |
|
∂F(xk ) 2 |
|
∂F(xk ) |
2 |
|||
|
∂x |
|
+ |
∂x |
|
|
≤ ε, |
|
|
|
|
|
2 |
|
|
||
|
|
1 |
|
|
|
|
|
|
где ε – точность решения задачи.
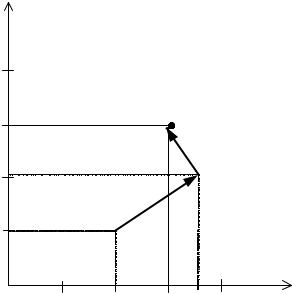
Графическая интерпретация процесса решения примера 45 приведена на рис. 4.12.
Следует обратить внимание на то, что очередная точка лежит на направлении вектора градиента и каждое последующее направление перпендикулярно предыдущему.
72
x2
4
3 |
∆ |
|
2
1
x0
0
1 2
F(x2) |
x3 = x* |
x2 |
∆F(x1) |
|
x1 |
∆F(x0) |
|
x1
3 4
Рис. 4.12. Графическая интерпретация решения примера 4.5 методом наискорейшего спуска
4.2.3. Метод Флетчера-Ривса. Этот метод дает хорошие результаты при по-
иске x* из удаленной точки x0 и быстро сходится в окрестности точки минимума. Для удобства записи последующих формул введем следующее обозначение:F(x) = g(x) , тогда направление поиска на первой итерации ( k = 0 ) определяет-
ся как S 0 = − F(x0 ) = −g 0 . Общая формула для направлений поиска на всех последующих итерациях ( k = 1,2,3...) имеет вид
S k = −g k + |
|
|
|
|
g k |
|
|
|
2 |
S k −1 . |
||||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
g k −1 |
|
|
|
|
2 |
|||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
||||||
Величина шага αk в направлении S k выбирается так же, как в методе наискорейшего спуска из условия достижения экстремума функции в рассматривае-
мом |
направлении. Очередная точка xk +1 вычисляется по формуле |
xk +1 |
= xk + αk S k . Метод весьма эффективен при решении практических задач. Не- |
большой объем памяти ПЭВМ, необходимый для проведения поиска, делает его особенно полезным при решении задач большой размерности.
73
Пример 4.6. Найти точку минимума F(x) = x1 − 4x1x2 + 4x12 + 3x22 , если x0 =[0,0].
1-й шаг. Определяем направление движения S 0 из начальной точки x0 .
F(x)T = g(x)T = ∂F , ∂F =[1− 4x2 +8x1;−4x1 + 6x2 ], тогда S0 = -g0 = [-1, 0].∂x1 ∂x2
2-й шаг. Координаты очередной точки х1 представим следующим образом:
x1 = x0 + α0 S 0 , или |
x1 x0 |
S |
0 |
|
|
|
0 |
|
|
|
|
−1 |
|
|
−α0 |
|
|
|||||||||||||||||||||||||
|
11 |
|
= 10 |
+ |
α0 |
10 |
|
= |
|
+α |
0 |
|
|
= |
|
0 |
. |
|
||||||||||||||||||||||||
|
|
|
|
|
|
x2 |
x2 |
|
S2 |
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|||||||||||||||||
Подставляя |
|
x1 |
и x1 |
в F(x) , получим F(α0 ) = 4(α0 )2 −α . Величину α0 най- |
||||||||||||||||||||||||||||||||||||||
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
дем из условия |
|
∂F |
|
=8α0 −1 = 0 , отсюда α0 |
= |
|
|
1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
∂α0 |
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
x1 |
|
|
|
|
x1 = 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Следовательно, |
=- 0,125; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3-й шаг. Определяем направление движения S1 из точки x1 , (k = 1) |
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
S1 |
= −g1 + |
|
|
g1 |
|
|
|
|
2 |
S 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
g0 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Выполним необходимые вычисления: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
(g1)T =[0, 0,5]; |
|
g1 |
|
2 |
= (g1 )T g1 = [0, 0,5] |
|
|
0 |
|
|
|
|
|
|
|
|
g0 |
|
|
|
2 |
|
1 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
0,5 |
|
= |
0,25; |
|
|
|
|
|
|
= |
(g0)T g0 =[1, 0] |
=1, |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тогда (S1)T = −[0, 0,5] − 0,25[1, 0] = [−0,25; − 0,5]. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
4-й шаг. Запишем координаты следующей точки x2 |
= x1 + α1S1: |
|
||||||||||||||||||||||||||||||||||||||||
|
|
x1 |
|
− 0,125 |
− 0,25 |
|
|
|
|
|
|
|
|
− 0,125 − 0,25α1 |
|
|||||||||||||||||||||||||||
|
|
x |
22 |
|
= |
0 |
|
+ α1 |
− |
0,5 |
= |
|
0 |
− |
|
|
α1 |
|
. |
|
||||||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,5 |
|
|
|
|
|
|
|
|
|||||||
Подставим координаты точки x1 в F(x) |
|
и найдем α1 из условия минимиза- |
||||||||||||||||||||||||||||||||||||||||
ции функции F(α1) |
в направлении S1: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
F(α1) = 0,5(α1)2 − 0,25α1 − 0,0625; |
|
|
|
|
|
|
dF |
|
= α1 − 0,25; α1 = 0,25 . |
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
dα1 |
|
|
||||||||||||||||||||||||||||||||||
Следовательно, |
x2 |
= – 0,1875; x2 |
= −0,125. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
74