


На рис. 4.6 F ' (z) < 0 , поэтому следующий интервал, на котором ищется экстремум функции [z, N ] и «секущая» проводится через точки F ' (z) и F ' (N) , находится очередное приближение z1 к экстремуму и т.д.
4.1.4. Методы полиномиальной аппроксимации. Логическая структура по-
иска с помощью метода исключения интервалов основана на простом сравнении значений функции в двух пробных точках. При этом в расчет принимается только отношение порядка на множестве значений функции и не учитывается величина разности между значениями функции.
Рассмотрим методы поиска, которые позволяют учесть относительные изменения значений функции и являются в ряде случаев более эффективными, чем методы исключения интервалов.
Выигрыш в эффективности достигается ценой введения дополнительного требования, согласно которому исследуемые функции должны быть достаточно гладкими.
Основная идея методов: по информации о m испытаниях (xi , F (xi )), i =1, m строится аппроксимирующий полином ϕ(x) степени n ≤ m −1, который
используется для оценивания координаты точки экстремума.
Качество оценок координаты точки оптимума можно повысить двумя методами:
1)использование полинома более высокого порядка;
2)уменьшение интервала аппроксимации.
Однако построение аппроксимирующего полинома порядка выше третьего становится весьма сложной процедурой, поэтому второму способу отдается предпочтение.
Метод квадратичной аппроксимации. Для трех точек испытаний ( m = 3 )
x1, x2 , x3 в качестве полинома ϕ(x) используется квадратичная функция |
|
ϕ(x) = α0 + α1(x − x1) + α2 (x − x1)(x − x2 ) . |
(4.11) |
Величины α0 , α1 и α2 должны быть такими, чтобы значения ϕ(x) и F(x)
совпадали в трех точках |
x1, x2 , x3 . |
Значения F(x) в этих точках считаются из- |
||||
вестными, т.е. |
F(x1) = F1 , F(x2 ) = F2 , |
F(x3 ) = F3 . Так как |
ϕ(x1 ) = α0 |
и |
||
ϕ(x1 ) = F1, то |
|
|
|
|
|
|
|
|
|
α0 = F(x1 ) . |
(4.12) |
||
При x = x2 |
имеем |
ϕ(x2 ) = α0 |
+ α1 (x2 |
− x1 ) = F(x1 ) + α1 (x2 |
− x1 ) = F2 , |
от- |
сюда |
|
|
|
|
|
|
60

|
|
|
|
|
|
|
|
α |
= |
F2 − F1 |
. |
|
|
|
|
|
|
|
|
|
|
|
(4.13) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
x2 − x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Вычисляем ϕ(x3 ) в точке x = x3 : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
ϕ(x |
3 |
) = F |
+ |
(F2 − F1)(x3 − x1) |
+ α |
2 |
(x |
3 |
− x |
)(x |
3 |
− x |
2 |
) = F . |
|||||||||||||||||
|
|
||||||||||||||||||||||||||||||
|
1 |
|
(x2 |
− x1) |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
3 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Тогда величина α2 определяется выражением |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
F3 − F1 |
|
|
F2 − F1 |
|
|
|
|
||||||||||
|
|
|
|
α |
|
= |
|
|
|
|
|
|
− |
. |
|
(4.14) |
|||||||||||||||
|
|
|
|
|
|
x |
|
− x |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
2 |
|
|
3 |
2 |
|
x |
3 |
− x |
|
|
x |
2 |
− x |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
||||
Таким образом, по результатам трех испытаний можно найти коэффициенты α0 , α1 , α2 аппроксимирующего квадратичного полинома. Для нахождения экс-
тремума приравнивается к нулю первая производная полинома ϕ(x) :
ddxϕ = α1 + 2α2 x − α2 (x1 + x2 ) = 0 ,
тогда оценочное значение xˆ координаты точки экстремума вычисляется следующим образом:
xˆ = |
α2(x1 +x2) −α1 |
= |
x2 +x1 |
− |
1 |
(F2 −F1)(x3 −x2)(x3 −x1) |
|
. |
(4.15) |
|
2α2 |
2 |
|
2 (F3 −F1)(x2 −x1) −(F2 −F1)(x3 −x1) |
|
|
|||
Как правило, точки x* и xˆ точно не совпадают. При поиске минимума унимодальной функции с высокой степенью точности ε необходимо последовательно применять сначала методы сокращения интервала неопределенности, а затем методы полиномиальной аппроксимации.
Пусть задана совокупность удачных точек a, x0 , b . На рис. 4.7 приведена
блок-схема алгоритма, реализующего поиск минимума унимодальной функции F(x) с использованием квадратичной аппроксимации и метода сокращения ин-
тервала неопределенности.
Метод кубической аппроксимации. Для четырех точек испытаний поиск минимума можно вести с помощью метода кубической аппроксимации. В качестве аппроксимирующего полинома ϕ(x) используется кубическая парабола
ϕ(x) = α |
0 |
+ α x + α |
2 |
x2 + α |
x3 . |
(4.16) |
|
1 |
3 |
|
|
61

Начало
ak =a;xk =x0;bk =b
Вычисляются
F1 =F(ak );F2 =F(xk );F3 =F(bk )
Вычисляется xˆ повыражению(4.15)
F(bk)
F(ak)
F(xk) F(xˆ)
ak |
xk |
xˆ |
bk |
|
|
да |
|
ak = xk F1 = F2 xk = xˆ F2 = F(xˆ)
|
Вычисляется F(xˆ) |
|
нет |
xˆ |
да |
|
< xk |
|
F(xˆ) < F(xk ) |
нет |
нет F(xˆ) < F(x ) |
|
|
k |
F(bk)
F(ak) F(xk)F(xˆ)
ak xk xˆ bk
bk =xˆ F3 =F(xˆ)
F(ak)
F(x1) F(b1)
F(xˆ)
ak xˆ xk bk
ak =xˆ F1 =F(xˆ)
F(ak)
F(bk)
F(xˆ)
F(xk)
akда xˆ xk bk
bk = xk F3 = F2 xk = xˆ F2 = F(xˆ)
нет
bk −ak <ε
да
Конец
Рис. 4.7. Блок-схема алгоритма поиска минимума унимодальной функции
62

Не нарушая общности, можно предположить, что рассматриваются точки на
единичном интервале так, что ak |
|
= 0; |
xk = k ; xr |
= r ; bk = 1, где 0 < k < r < 1. |
||||||||||||||||||||||
|
|
Взяв эти точки в качестве узлов аппроксимации, для определения коэффици- |
||||||||||||||||||||||||
ентов α в полиноме (4.16) можно составить систему линейных уравнений: |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
F(ak ) = α0 ; |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
F(xk ) = α0 + α1k + α2k 2 + α3k 3 ; |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
F(x |
r |
) = α |
0 |
+ α r + α |
2 |
r |
2 + α |
3 |
r3 ; |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
F(bk ) = α0 + α1 + α2 + α3 , |
|
|
|
|
|
|
||||||||||||||
из которой можно найти α1, α2 , α3 . |
|
|
ϕ(x) |
|
определяется |
из |
|
выражения |
||||||||||||||||||
|
|
Точка минимума |
|
полинома |
|
|
|
|
||||||||||||||||||
|
dϕ |
= α1 + 2α2 x + 3α3 x2 = 0 , тогда оценочное значение |
xˆ точки |
x* |
определится |
|||||||||||||||||||||
|
|
|||||||||||||||||||||||||
|
dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
как решение квадратного уравнения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
xˆ |
|
= |
−2α |
2 |
± 4α2 |
−12α α |
|
|
(4.17) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1 3 . |
|
|
||||||||
|
|
|
|
|
|
|
|
|
1,2 |
|
|
|
|
|
6α3 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Для существования решения должно выполняться неравенство α2 |
≥ 3α α |
3 |
. В |
|||||||||||||||||||||
|
|
|
d 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
1 |
|
|
точке минимума |
ϕ |
= 2 |
α |
2 |
|
+ 6α |
3 |
xˆ > 0 . |
|
Если |
|
интервал |
не |
единичный, |
||||||||||||
|
|
|
dx 2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
то xˆ = ak + (bk − ak )xˆ1 .
Дальнейшая процедура поиска минимума аналогична процедуре предыдущего метода и связана с сокращением интервала неопределенности.
Построение аппроксимирующего полинома можно выполнить и на основе меньшего числа точек, если в каждой точке вычислять не только значения функции, но и ее производные.
Аппроксимирующая кубическая функция записывается в виде
ϕ(x) = α0 + α1 (x − x1 ) + α2 (x − x1 )(x − x2 ) + α3 (x − x1 )2 (x − x2 ) . (4.18)
Коэффициенты αi подбираются так, чтобы значение ϕ(x) и ее производных в точках x1 и x2 совпадали со значениями F(x) и F ' (x) в этих точках:
63
dϕ |
= α |
1 |
+ α |
2 |
(x − x ) + α |
2 |
(x − x |
2 |
) + α |
3 |
(x − x )2 + 2α |
3 |
(x − x )(x − x |
2 |
) ; (4.19) |
|
|
||||||||||||||||
dx |
|
1 |
|
|
1 |
|
1 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
ϕ(x1 ) = F(x1) = α0 |
; |
|
|
|
(4.20) |
||||
|
|
|
|
|
ϕ(x2 ) = F(x2 ) = α0 + α1(x2 |
− x1) ; |
|
|
|
(4.21) |
||||||
ϕ' (x1) = F ' (x1) = α1 + α2 (x1 − x2 ) ;
ϕ' (x2 ) = F ' (x2 ) = α1 + α2 (x2 − x1 ) + α3 (x2 − x1 )2 .
После того как коэффициенты найдены, можно оценить координаты точки экстремума, приравнивая нулю производную.
Далее необходимо действовать по аналогии со случаем квадратичной функ-
ции.
4.2. Поиск безусловного экстремума функций многих переменных
Задача формулируется следующим образом: найти значения переменных x1, x2,…, xn , доставляющие экстремум скалярной целевой функции F(x1, x2,…, xn), если ограничения на переменные отсутствуют. Удобно предположить, что функция F и ее производные существуют и непрерывны.
Рассмотрим некоторые фундаментальные понятия, используемые при поиске экстремума.
Градиент функции F(x) – это вектор, составляющие которого равны частным производным функции F(x) по соответствующим переменным, т.е.
|
∂F |
|
∂F |
|
∂F |
|
|
F(x)Т = |
|
, |
|
,K, |
|
|
. Направление вектора градиента совпадает с направле- |
|
|
|
|||||
|
∂x1 |
|
∂x2 |
|
∂xn |
|
|
нием наискорейшего |
возрастания функции. Вектор противоположного знака |
||||||
− F(x) называется антиградиентом, его направление совпадает с направлением наискорейшего убывания функции.
Матрица вторых производных 2 F(x) – это симметричная квадратная матрица порядка n вторых частных производных функции F(x). Эту матрицу называют матрицей Гессе и обозначают H (x) = 2 F(x) . Ее элемент, расположенный
на пересечении i-й строки и j-го столбца, равен ∂2 F .
∂xi∂x j
64
Необходимые и достаточные условия существования экстремума. Пусть
хТ=[x1 , x2,…, xn] – вектор переменных. Для наличия в точке x* локального минимума (максимума) необходимо, чтобы выполнялось равенство F(x*) = 0 и мат-
рица Гессе H (x*) = 2 F(x*) была положительно (отрицательно) полуопределен-
ной, т.е. xT Hx ≥ 0 ( xT Hx ≤ 0 ).
Достаточным условием существования минимума (максимума) в точке x* является положительная (отрицательная) определённость матрицы Гессе в этой точ-
ке, т.е. xT Hx > 0 ( xT Hx < 0 ).
Методы решения задач безусловной оптимизации можно разделить на три класса:
1.Методы прямого поиска, основанные только на вычислении значений целевой функции.
2.Градиентные методы, в которых используются значения первых производных F(x).
3.Методы второго порядка, в которых наряду с первыми производными используются также вторые производные функции F(x).
В ряде практических инженерных задач присутствует информация только о значениях целевой функции, поэтому прямые методы имеют важное значение, хотя требуют большего количества вычислений значений функции.
4.2.1. Метод Нелдера-Мида. Метод является одним из методов прямого поиска по симплексу. Суть его в следующем.
В области допустимых значений переменных выбирается начальная точка и оценивается значение целевой функции в определённых точках, окружающих базовую. «Наилучшая» из исследуемых точек принимается начальной на следующем шаге. В качестве точек эксперимента выбираются вершины симплекса. Симплекс в N-мерном пространстве представляет собой многогранник, образованный N+1 равноотстоящими друг от друга точками-вершинами. В случае двух переменных симплексом является равносторонний треугольник, в трёхмерном пространстве треугольная пирамида и т.д.
На рис. 4.9, а в виде равностороннего треугольника с вершинами x0, x1 и x2 приведен симплекс для функции двух переменных. В каждой из вершин симплекса оценивается значение целевой функции и при поиске минимума определяется вершина, которой соответствует наибольшее значение функции. Пусть это будет вершина x1. Далее находится середина отрезка x0 x2 (центр тяжести) xC, и точка x1 проецируется через неё в новую точку x3, которая используется в качестве вершины при построении нового симплекса ( x0 x2 x3 ).
Поиск завершается, когда разности между значениями функции в вершинах становятся достаточно малыми или диаметр симплекса становится меньше заданной величины итерационной погрешности по переменным x.
65
x0 |
|
|
x0 |
|
|
|
x1 |
x3 |
x1 |
|
x |
нов |
z |
xC |
|
xC |
|
|||
|
|
|
|
|
||
|
x2 |
|
|
x2 |
|
|
|
а |
|
|
б |
|
|
|
x0 |
|
|
|
|
|
|
x1 |
z |
x |
нов |
|
|
|
xC |
|
|
|
||
|
|
|
|
|
||
|
|
x2 |
|
|
|
|
|
|
в |
|
|
|
|
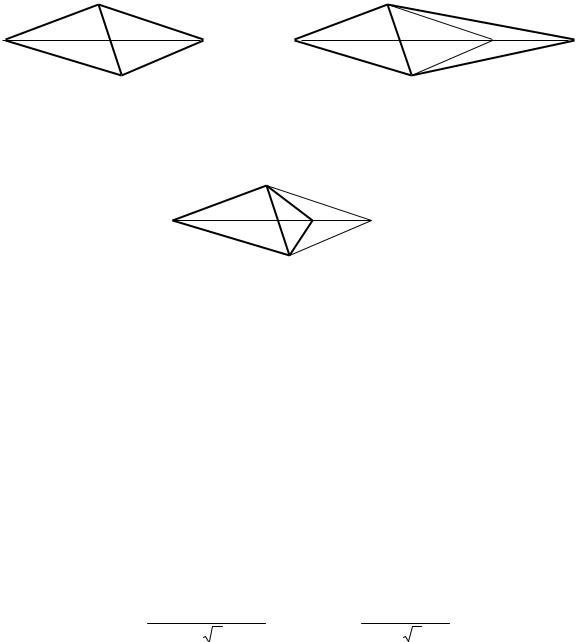
Рис. 4.9. Растяжение и сжатие симплекса:
а – нормальное отражение, α = 2 ; б – растяжение, α = 3; в – сжатие, α = 1,5
Для построения симплекса, кроме начальной точки, необходимо задать масштабный множитель (коэффициент) α. При α = 1 ребра симплекса имеют единичную длину.
В N-мерном пространстве координаты вершин вычисляются по формуле
x0 |
+ δ1, |
если |
j ≠ i, |
|
|
j |
|
|
|
xi = |
|
+ δ2 , |
если |
j = i, |
x0 |
||||
|
j |
|
|
|
Здесь
δ1 |
|
(N +1)1 / 2 + N −1 |
α; |
|
= |
N 2 |
|
||
|
|
|
|
|
i = |
1, N |
, j = |
1, N |
. |
(4.22) |
δ2 |
|
(N +1)1 / 2 |
−1 |
α. |
= |
N 2 |
|
||
|
|
|
|
Пусть xk – точка, подлежащая отражению. Центр тяжести остальных N точек
расположен в точке xc = |
1 |
N |
i ≠ k . Отражение вершины симплекса осуществ- |
||
∑xi , |
|||||
N |
|||||
|
i |
|
|
||
ляется вдоль прямой, проходящей через xk, xc, и задается формулой |
|
||||
|
|
|
x = xk + α(xc − xk ). |
(4.23) |
|
66

При α = 0 получаем исходную точку xk , при α = 1 получаем центр тяжести xС. Для того чтобы отражение было симметричным, для получения новой вершины хНОВ принимают α = 2 , тогда xнов = 2xc − xk предыд.. Проиллюстрируем вычислительную схему метода на примере функции, зависящей от двух переменных.
Пример 4.4. Минимизировать F(x) = x2 |
−2x |
+ x |
2 |
2 −4x |
2 |
+5. |
||||||||
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
||
Пусть x0 =[0,0] и |
α = 2 . Тогда |
|
|
|
|
|
|
|
|
|
|
|||
δ = |
|
3 +1 |
2 |
=1,932; |
δ |
|
= |
|
3 −1 |
2 = 0,518 . |
||||
|
|
2 |
|
|
|
|||||||||
1 |
|
|
|
|
2 |
|
|
|
||||||
|
|
2 2 |
|
|
|
|
|
|
2 |
|
|
|
||
На основании этих значений вычисляются координаты двух других вершин симплекса:
x11 = x10 + δ1 =x12 x20 + δ2
x12 = x10 + δ1 =x22 x20 + δ2
0 + 0,518 |
0,518 |
|||
|
+1,932 |
|
= |
; |
0 |
|
1,932 |
|
|
|
|
|
|
|
0 +1,932 |
|
1,932 |
|
|
|
|
|
= |
. |
0 |
+ 0,518 |
0,518 |
||
|
|
|
|
|
Целевая функция в вершинах симплекса определяется следующими величинами: F(x0 ) = 5 ; F(x1 ) = 0,237; F(x2 ) =3,066 . Максимальное значение функция цели имеет в вершине x0, поэтому точку x0 необходимо отразить относительно
центра тяжести двух остальных вершин симплекса |
xc = |
1 |
(x1 + x2 ) , тогда новая |
|||||||||
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
точка x3 при α = 2 определится выражением x3 = 2xc + x0 = x1 + x2 − x0: |
||||||||||||
x3 |
|
0,518 |
1,932 |
|
|
0 |
2,45 |
|||||
|
1 |
|
= |
|
+ |
|
− |
|
= |
. |
||
|
3 |
|
1,932 |
|
0,518 |
|
0 |
2,45 |
||||
x2 |
|
|||||||||||
|
|
|
|
|
|
|
|
|||||
В полученной точке F(x3 ) = 2,3 , т.е. наблюдается уменьшение целевой
функции.
В новом симплексе x1, x2 и x3 наибольшее значение F(x) соответствует точке x2, поэтому её следует отразить относительно центра тяжести точек x1 и x3. Итерации продолжаются до тех пор, пока разности между значениями функции в вершинах становятся достаточно малыми.
67