

5. 7. 6. Метод сканiрованiя
Наданий метод укладає у послідовному перегляді значень цільової функції у ряді точок, що належать до області зміни незалежних перемінних, та знаходженні серед цих точок такої, у якій цільова функція має екстремум.
Точність методу, природно, визначається отим, наскільки густо розташуються обрані точки у галузі пошуку. Основним достоїнством методу сканiрованiя є оте, що при його використанні з достатньо " густим " розміщенням точок завжди гарантується відшукування глобального екстремуму. Проте, для цього у наданому методі вимагається чималий обсяг обчислювань.
Метод сканiрованiя не пов'язаний з наявністю локальних екстремумів на відміну від практично всіх інших методів нелінійного програмування. Тому його можна використовувати для грубої оцінки " областей притяжіння " локальних екстремумів, після чого можуть застосовуватися методами градiєнтного пошуку для точного визначення координат кожного екстремуму.
Найбільш простий алгоритм пошуку екстремуму методом сканiрованiя "пошук на сітці перемінних" укладається в тому, що по кожної незалежної перемінної задаються припущення у відповідному порядку, що забезпечує " заповнення" всієї досліджуваної області рівномірною та достатньо густою сіткою. Так, наприклад, для пошуку екстремуму функції двох перемінних спершу при фіксованому значенні Uk2розраховуються значенняR(Uj) приUK1 = UK-11для всього діапазону зміни незалежної перемінноїUj та фіксує значення екстремуму. Після цього друга перемінна змінюється на крокΔU2 UK2= UK-12U+ΔU2 і розрахунки повторюються при варіюванні перемінноїUj
Для довільного числа перемінних крок по наступної перемінної виробляється після отого, як повністю завершений цикл по попередньої.
Обсяг обчислювань при використанні методу сканiрованiя можна оцінити по наступній формулі :
![]() (5.59)
(5.59)
де Δ- точність визначення екстремума
n - кількість незалежних перемінних.
При n = 2 та Δ= 10 кількість обчислювань S = 10-6, а при тому ж значенні точності n = 3 S = 10-6.
Тому метод сканiрованiя ефективно використовується при числі перемінних не більш трьох.
 Існують різноманітні модiфикації
методу сканiрованiя, що
застосовуються в основному для
скорочування обсягу обчислювань.
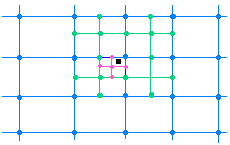
Розглянемо одну з них - сканiрованiє
з перемінним кроком. Спершу
задається достатньо великий крок(ΔU >)та виконується "
грубий " пошук, що локалiзує область
існування глобального екстремуму ( P )
(рiс. 5.26). Рис 5.26
Існують різноманітні модiфикації
методу сканiрованiя, що
застосовуються в основному для
скорочування обсягу обчислювань.
Розглянемо одну з них - сканiрованiє
з перемінним кроком. Спершу
задається достатньо великий крок(ΔU >)та виконується "
грубий " пошук, що локалiзує область
існування глобального екстремуму ( P )
(рiс. 5.26). Рис 5.26
Після отого, як область визначена , виробляється пошук з меншим кроком тільки в межах знайденої області. Можна організувати ряд таких процедур послідовного уточнення по положення оптимуму
При використанні наданого алгоритму обсяг обчислювань істотно але скорочує і може бути визначений по наступній формулі :
 (5.60)
(5.60)
де r - число етапів уточнення пошуку, на якому крок зменшувався в К раз
n - число незалежних перемінних;
Δ- точність визначення екстремуму.
Початковий крок сітки перемінних в даному випадку визначається формулою :
Δo=Kr Δ ( 5. 59 )
При n = 2, Δ= 10-3, r = 2, K = 10 иΔo= 0,1 кількість обчислювань S=900.
При постійному кроці сканiрованiя для отих же умов вимагалося 106обчислювань, т. є. обсяг обчислювань скоротився більш ніж у 1000 раз. Ще більш чималий виграш спостерігається при більшому числі незалежних перемінних. Так, для отих же наданих, але при n = 3 число обчислювань з перемінним кроком сканiрованiя складе S = 17000, а для постійного кроку S = 109.