

5.4.Аналітичні засоби
Аналітичні засоби засновані на класичних засобах математичного аналізу.
Задача оптимізації формулюється наступним чином. Існує процес, відома його математична модель та встановлений критерій оптимізації R у вигляді функції:
![]() (5.13)
(5.13)
або функціонала:
![]() , (5.14)
, (5.14)
де
![]() .
.
Задані обмеження:
![]() та
та![]() . (5.15)
. (5.15)
Необхідно при заданих
обмеженнях знайти такі значення
![]() ,
при яких R досягає екстремуму. У випадку
функціонала R необхідно знайти вид
функції
,
при яких R досягає екстремуму. У випадку
функціонала R необхідно знайти вид
функції![]() ,при
якої R досягає екстремуму.
,при
якої R досягає екстремуму.
Аналітичні засоби пошуку екстремуму критерію оптимальності застосовуються до задач, у яких оптимiзуєма функція має аналітичний вираз, а число перемінних невелике.
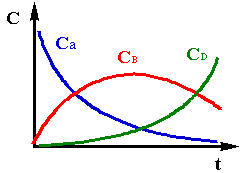
У вигляді прикладу розглянемо визначення оптимального часу перебування суміші у РІВ.
Для двох послідовних реакцій
![]() необхідно
визначити оптимальний час перебування
t, при якому вихід целевого продукту В
буде досягати максимуму.
необхідно
визначити оптимальний час перебування
t, при якому вихід целевого продукту В
буде досягати максимуму.
Нехай а - початкова концентрація
компоненту А. В початковий момент часу
концентрації компонентів В та D дорівнюють
нулю: при t = 0 : CB
= СD
= 0. Критерій оптимізації:
вихід цільового продукту
![]() .
Керуючий вплив - час перебування t.
Характер зміни концентрацій компонентів
в часу приведений на рис 5. 10.
.
Керуючий вплив - час перебування t.
Характер зміни концентрацій компонентів
в часу приведений на рис 5. 10.
Нехай реакції протікають по першому порядку.
Швидкість реакцій
![]() (5.16)
(5.16)
![]() (5.17)
(5.17)
![]() (5.18)
(5.18)
Із (5.16) знайдемо вираз для поточної концентрації СА.
![]() ;
;
![]()
![]()
 Проiнтегрiровав, одержимо:
Проiнтегрiровав, одержимо:
![]() (5.19).
(5.19).
Рис. 5. 10 Підставимо (5.19) та (5.17) в (5.18):
![]() ,
,
або
![]() . (5.20)
. (5.20)
Розв'язав одержане рівняння, знайдемо вираз для визначення поточної концентрації компонента В:
![]() . (5.21)
. (5.21)
Вихід
цільового продукту R=CB/a=![]() .
(5. 22)
.
(5. 22)
Дослідимо
екстремум одержаної цільової функції
(5.22). Умови існування максимуму:
![]()
![]() <0.
<0.
Знайдемо першу похідну і прирівняємо її нулю:
![]() .
(5.23)
.
(5.23)
Вирішив одержане рівняння, визначимо оптимальний час перебування :
![]() . (5.24)
. (5.24)
Для перевірки виконання достатньої умови існування максимуму обчислюємо другу похідну:
![]()
Так як друга похідна менш 0, отже у наданій точці існує максимум цільової функції R.
Підставив (5.24) у (5.21), одержимо вираз для визначення максимальної концентрації компонента В:
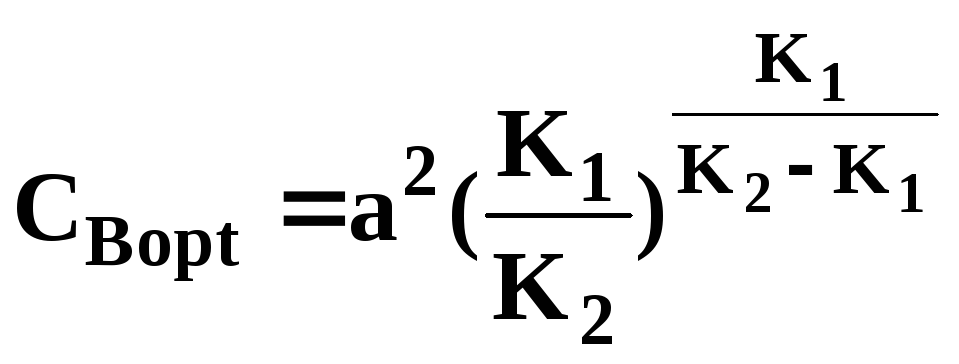 . (5.25)
. (5.25)
5.5. Загальна характеристика засобів рішення задач нелiнійного програмування
Коли цільова функція (5.6) і обмеження (5.7) нелінійні та для пошуку точки екстремуму не можна або дуже складно використовувати аналітичні засоби рішення, тоді для рішення задач оптимізації застосовуються засоби нелiнійного програмування. Як правило, при рішенні задач засобами нелінійного програмування використовуються численні засоби з застосуванням ЕОМ.
В основному засоби нелiнійного програмування можуть бути охарактеризовані як багатокрокові засоби чи засоби наступного поліпшення вихідного рішення. У цих задачах звичайно заздалегідь не можна сказати, яке число кроків гарантує знаходження оптимального значення з заданою мірою точності. Крім того, у задачах нелiнійного програмування вибір величини кроку представляє серйозну проблему, від успішного рішення якої залежить ефективність застосування того чи іншого засобу. Розмаїтість засобів рішення задач нелiнійного програмування якраз і пояснює прагнення знайти оптимальне рішення за найменше число кроків.
Більшість засобів нелiнійного програмування використовують ідею руху у n-мірному просторі в напрямку оптимуму. При цьому із деякого вихідного чи проміжного стану Ukздійснюється перехід в наступний стан Uk+1зміною вектору Uk на величину ΔUk, що називається кроком, тобто:
Uk+1=Uk+ΔUk(5.26).
В ряді засобів крок, тобто його величина і напрямок визначається як деяка функція стану Uk:
ΔUk=f(Uk) (5.27)
Отже, згідно з (5.26) новий стан Uk, що одержується внаслідок виконання кроку (5.27) може розглядатися як функція вихідного стану
Uk+1=Uk+f(Uk). (5.28)
У деяких засобах ΔUkзумовлено не тільки станом Uk, але і рядом попередніх станів:
ΔUk=f(Uk),Uk-1…,Uk-2(5.29)
Uk+1=Uk+f(Uk),Uk-1…,Uk-2.(5.30)
Природно, що алгоритми пошуку типу (5.30) є більш загальними і принципово спромагаються забезпечити більш високу сходимість до оптимуму, тому що використовують більший обсяг інформації про характер поводження оптимальної функції.
У
теперішній час для рішення подібних
задач розроблено значне число засобів,
проте не можна віддати перевагу
якому-небудь одному. Вибір засобу
визначається складністю об'єкту і
задачею оптимізації, що вирішується.
Засоби нелiнійного програмування
відповідно до засобу визначення кроку
пошуку
![]() можна віднести до одного із 3-х типів:
безградієнтні засоби; градiєнтні засоби;
засоби випадкового пошуку.
можна віднести до одного із 3-х типів:
безградієнтні засоби; градiєнтні засоби;
засоби випадкового пошуку.
Всі ці засоби можна назвати прямими ітеративними засобами.