

5.2.3. Особливі крапки і лінії цільової функції
Нагадаємо, що необхідною умовою існування екстремуму функції багатьох перемінних є виконання системи рівнянь
dR/dUj=0 , j=1,2,...,n (5.11)
 Оскільки умова
(5.11) необхідне,
але ще недостатнє,
можуть представитися випадки, коли при
його виконанні в деякій крапці
Us
екстремуму
функції R(U)
у ній не буде – так звані
"сідлови"
крапки
(рис.5.6).
Оскільки умова
(5.11) необхідне,
але ще недостатнє,
можуть представитися випадки, коли при
його виконанні в деякій крапці
Us
екстремуму
функції R(U)
у ній не буде – так звані
"сідлови"
крапки
(рис.5.6).
Іншим
типом особливостей цільової
функції є
так називані
"яри", при наявності яких уздовж
визначених
напрямків величина
цільової
функції змінюється дуже слабко. Як
приклад можна привести
рівняння еліпса,
![]() ,
коли а > в (рис.5.7):
,
коли а > в (рис.5.7):
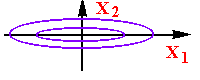
Рис.5.6
У загальному випадку лінія "дна яру" може не збігатися по напряму Рис.5.7
зосями координат і, крім того, істотно
відрізняється
від прямої,
тобто можливі також "криволінійні
яри" ( рис.5.8).
рис.5.8).
Рис.5.8
5.2.4. Глобальний і локальний оптимуми
При відшуканні оптимуму цільової функції R(U) задачею, як правило, є визначення сукупності значень незалежних змінних Uj , що відповідає не якому-небудь екстремуму функції R(U) , а найбільшому чи найменшому значенню R(Uj) у припустимої області Vдоп . Якщо шукається, наприклад, мінімум, то рішення задачі оптимізації повинне задовольняти умові:
R(Uопт ) < R(U) (5.12)
причому U V.
Умова(5.12) повинна виконуватися для будь-яких припустимих значень U.
 Оптимум, для якого справедливо
умова
(5.12), звичайно називається гло-
Оптимум, для якого справедливо
умова
(5.12), звичайно називається гло-
бальним. Крім нього функція R(U) може
мати один чи трохи локальних
екстремумов (рис.5.9). У цьому випадку
складність задачі пошуку екстремума
для функції багатьох перемінних значно
збільшується.
Рис.5.9
5.3. Методи рішення задач оптимізації
Вибір методу рішення - один з найважливіших етапів оптимізації.
Можна виділити наступні групи методів:
- аналітичні методи;
- методи математичного програмування.
Розглянемо більш докладно групи цих методів і деякі з них.
Група аналітичних методів оптимізації поєднує аналітичний пошук екстремуму функції, метод множників Лагранжа, вариаційні методи і принцип максимуму.
Аналітичний пошук екстремуму функції, заданих без обмежень на незалежні перемінні, застосовується до задач, у яких оптимізуєма функція має аналітичне вираження, що диференцується у всьому діапазоні дослідження, а число перемінних невелике. Це один з найбільш простих методів.
Група методів математичного програмування включає динамичнє програмування, лінійне програмування і нелінійне програмування.
Динамічне програмування - ефективний метод рішення задач оптимізації багатостадійних процесів. Метод припускає розбивку аналізованого процесу на стадії (в часі чи в просторі)- наприклад, реактор у каскаді чи тарілка в колоні. Розгляд задачі починається з останньої стадії процесу й оптимальний режим
визначається постадійно.
Лінійне програмування - метод для рішення задач оптимізації з лінійними вираженнями для критерію оптимальності і лінійними обмеженнями на область зміни перемінних. Подібні задачі зважуються ітераційними способами. Ці методи використовуються при оптимальному плануванні виробництва при обмеженій кількості ресурсів, для транспортних задач і ін.
Методи нелінійного програмування- поєднують різні способи рішення оптимальних задач: градієнтні, безградієнтні і випадкового пошуку. Загальним для методів нелінійного програмування є те, що їх використовують при рішенні задач з нелінійними критеріями оптимальності. Усі методи нелінійного програмування - це чисельні методи пошукового типу. Суть їх - у визначенні набору незалежних перемінних, що дають найбільше збільшення оптимізуємої
функції. Дана група методів застосовується як для детерминованіх, так і стохастичних процесів.