

5. 7. 1. Метод сканiрованiя
Алгоритм методу слідуючи й . Iнтервал пошуку [Umin, Umax] розбивається на N рівних дільниць, кожний з яких равен кроку пошуку h. Далі послідовно визначається R(Uj) значення цільової функції у всіх точках розбивки, включаючи граничні точки та запам’ятається максимальне чи мінімальне значення цільової функції (рис.5.23).
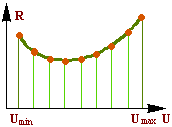 Екстремальне
значення функції може бути знайдено з
точністю до величини кроку пошуку.
Основним достоїнством наданого методу
є його простота та можливість знаходження
глобального екстремуму. До недоліків
треба віднести великий обсяг обчислювань,
що необхідно виконати для знаходження
екстремуму, особливо з високою
точністю.
Екстремальне
значення функції може бути знайдено з
точністю до величини кроку пошуку.
Основним достоїнством наданого методу
є його простота та можливість знаходження
глобального екстремуму. До недоліків
треба віднести великий обсяг обчислювань,
що необхідно виконати для знаходження
екстремуму, особливо з високою
точністю.
Рис. 5. 23
5. 7. 2. Метод локалiзації екстремума
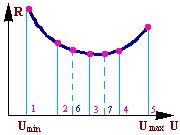
Iнтервал пошуку [Umin, Umax] розбивається на 4 рівні частини та у точках розбивки та на кордонах інтервалу вираховуються значення цільової функції - у точках 0, 1, 2, 3 та 4 (рис. 5.24). Неважко помітити, що розбивка інтервалу на 4 - найбільш зручний варіант, так як на кожному наступному кроці необхідно обчислювати тільки 2 нових значення цільової функції. У наданому випадку Рис 5.24
у точках 5 та 6.
Локалiзація екстремуму продовжується до отих пор, доки не буде досягнута задана точність. Абсолютна помилка у знаходженні стану екстремуму визначається по формулі :
Δ=(Umax-Umin)*2-(S-1)/2 (5.51)
де S- кількість обчислювань значень цільової функції завжди непарне число.
Так, наприклад, при S=21 відносна помилка у знаходженні стану екстремуму складе:
Δ=(Umax-Umin)*2-10 ≈ 0.001
5. 7. 3. Метод "золотого перетину"
Результати пошуку можуть бути краще, якщо ділення iнтервала [Umin, Umax], у якому знаходиться екстремум, виробляти не на ціле число, а у певному ірраціональному відношенні.
(a / b) = (b / c) або a*c = b2 (5.52)
В основі цього методу лежить закон геометричного відношення чи "золотого перетину". Нехай даний відтинок a, що поділений на дві нерівні частиниbтаcтак, що виконується. Відповідно до цього закону визначаються точки досліджуваного інтервалу, у яких необхідно виробляти обчислення цільової функції.
Оскільки c = a – b, отой підставив вираз длясв (5.52) та запровадивши нову переміннуk = b / a, після перетворень одержимо:
K2 + K – 1 = 0(5.53)
Вирішив (5.53), одержимо близьке значення K ~ 0. 62.
Порядок пошуку екстремуму методом "золотого перетину" наступний . На досліджуваним iнтервалі визначаються дві точки Umin та Umах:
U1=Umin+(1-K).a
U2=Umin+K.a(5.54)
де а - довжина інтервалу Umin – Umax.
У точках U1 іU2 розраховується цільова функція. За знайденим значеннямR(U1і U2)з облікомR(Umin і Umax)визначається подінтервал, у якому локалізований екстремум. У даному випадку це [Umin,U2] (рис. 5.25).
Далі усередині великого подінтервалу [Umin,U1] знаходиться крапка, що відстоїть від загального кінця подінтервалу на відстані
(1–К)Wb= K2 .b,
де b- довжина подінтервалу [Umin,U2], у якому локалізований екстремум, причомуb = K.a. Тоді:
|
U3=Umin+K2.b =Umin+K2.(K.a)=Umin+K3.a |
(5.55) |
Неважко показати, що в інтервалі [Umin,U2] також дотримується"золотий перетин". Далі обчислюється значення цільової функціїR(U3)і порівнюються значенняR(U2), R(U1), R(U3). Знаходиться мінімальне значення (у даному випадкуR(U3)) і процедура продовжується - визначається аналогічно крапкаR(U4)і т.д., поки не буде знайдений екстремум із заданою точністю. Абсолютна помилка у визначенні положення екстремуму післяSобчислень складе
 (5.56)
(5.56)
При S=21 відносна помилка : Δ/(Umax-Umin)= 0,5*0.6218 ≈ 0.9*10-4Отже, точність розрахунку по методу "золотого перетину" практично на порядок перевершує точність розрахунку по методу локалізації екстремуму при тому самому кількості обчислень.
Розглянемо тепер деякі з методів багатомірного пошуку.