

5.6. Градiєнтні методи рішення задач оптимiзації
5.6.1. Градієнт цільової функції
Серед засобів, що застосовуються для рішення задач нелінійного програмування, чимале місце займають засоби пошуку рішення, засновані на аналізі похідної оптимiзуємої функції. Припускаємо надалі, що аналізується тільки диференційовані функції R(U). Розглянемо властивості цих функцій, які можна використовувати для аналізу їх поведінки.
В просторі n перемінних Uj, де визначена функція R(U) проводимо лінію у довільному напрямі L
 Розглянемо
значення функції R(U) у 2-х крапках U та
U*,
розміщених на ції прямій. Якщо скласти
відношення
Розглянемо
значення функції R(U) у 2-х крапках U та
U*,
розміщених на ції прямій. Якщо скласти
відношення
![]()
Рис. 5. 11
та направити довжину відтинку U* - U до нуля, то у межі одержимо величину, становлячи похідною від функції R(U) по напрямку L, тобто
![]() (5.31)
(5.31)
Знайдена похідна характеризує швидкість зміни функції R(U) у точці U за напрямком L. Оскільки через точку U можна провести нескінченну множину прямих по різноманітним напрямкам , отже, у кожній точці для функції R(U) можна визначити незчисленну множину похідних за різними напрямками.
Неважко показати, що всі ці похідні можуть бути виражені через похідні за координатами, число яких вже буде кінцевим і рівним розмірності n. За правилом диференціювання складних функцій:
![]() (5.32)
(5.32)
Розрахунок величин dUj/dL розглянемо на слідуючому прикладі. В просторі 2-х перемінних U1та U2проведена пряма L (рис. 5.12).
Е лемент
довжини
лемент
довжини![]() в
даному випадку можна виразити через
диференціали перемінних
в
даному випадку можна виразити через
диференціали перемінних
![]() (5.33)
(5.33)
При цьому, з прямокутного трикутника АВС можна записати
![]()
Рис.5.12 (5.34)
![]()
Аналогічно,
для многомірного випадку
![]() є ані що інше, як направляючі косинуси
обраного напрямку L по відношенню до
осей координат
є ані що інше, як направляючі косинуси
обраного напрямку L по відношенню до
осей координат
![]() (5.35)
(5.35)
Тоді, рівняння (5.32) можна записати
![]() (5.36)
(5.36)
Розглянемо одну з
поверхней постійного рівня функції
R(![]() ).
Ця поверхня характеризується тим, що у
будь-якій її точці цільова функція R(
).
Ця поверхня характеризується тим, що у
будь-якій її точці цільова функція R(![]() )
має одне й теж саме постійне значення
С. Рівняння наданої поверхні може бути
одержано з виразу для цільової функції
(5.6) порівнюванням його до постійної
величині C:
)
має одне й теж саме постійне значення
С. Рівняння наданої поверхні може бути
одержано з виразу для цільової функції
(5.6) порівнюванням його до постійної
величині C:
![]() (5.37)
(5.37)
Вирішуючи рівняння (5.37) щодо будь-якої з перемінних, можна збудувати зазначену поверхню, задаючись різноманітними значеннями інших перемінних.
О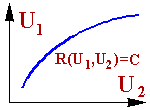 скільки
поверхня постійного рівня (5.37) має n-1
незалежних параметрів, очевидно, її
можна представити як поверхня з n-1
вимірами. Так, наприклад, у просторі 2-х
перемінних, тобто на площині, ця поверхня
вироджується у деяку лінiю, що має тільки
один вимір - довжину (рис. 5.13).
скільки
поверхня постійного рівня (5.37) має n-1
незалежних параметрів, очевидно, її
можна представити як поверхня з n-1
вимірами. Так, наприклад, у просторі 2-х
перемінних, тобто на площині, ця поверхня
вироджується у деяку лінiю, що має тільки
один вимір - довжину (рис. 5.13).
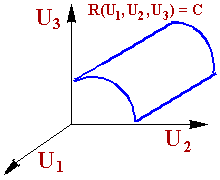

Рис.5.13
Рис.5.14
 В
просторі трьох перемінних поверхня
постійного рівня, визначена для функції
R(U1, U2,U3),
має вже два виміру - довжину та ширину
(рис. 5.14). Аналогічно у n-мірному просторі
поверхня постійного рівня функції R(
В
просторі трьох перемінних поверхня
постійного рівня, визначена для функції
R(U1, U2,U3),
має вже два виміру - довжину та ширину
(рис. 5.14). Аналогічно у n-мірному просторі
поверхня постійного рівня функції R(![]() ),
що описується рівнянням (5.37), має n-1
вимір. Таким чином,
у кожній точці поверхні у n-мірному
просторі можна провести n-1
взаємоперпендикулярних дотичних у
відповідності з числом вимірів цієї
поверхні. Крім отого, в цій точці можна
провести вісь, перпендикулярну всім
дотичним та, отже, спрямовану по нормалi
до поверхні. У вигляді зразку розглянемо
випадок, коли число керуючих впливів
n=3 (рис. 5.15).
),
що описується рівнянням (5.37), має n-1
вимір. Таким чином,
у кожній точці поверхні у n-мірному
просторі можна провести n-1
взаємоперпендикулярних дотичних у
відповідності з числом вимірів цієї
поверхні. Крім отого, в цій точці можна
провести вісь, перпендикулярну всім
дотичним та, отже, спрямовану по нормалi
до поверхні. У вигляді зразку розглянемо
випадок, коли число керуючих впливів
n=3 (рис. 5.15).
Дотичні та нормаль можуть розглядатися як система координат з початком у обраній точці поверхні.
Рис. 5.15
Надана система координат володіє однією важливою властивістю.
Часткові похідні від функції R(U) за напрямками осей, що є дотичними до поверхні, дорівнюють нулю, тому що вдовж цих напрямків функція R(U) зберігає постійне значення, оскільки розглядається поверхня постійного рівня функції R(U).
Якщо взяти довільний напрямок L, то похідна по ньому, на підставі сказаного, буде мати вигляд:
![]() (5.38)
(5.38)
Це слідує з рівняння (5.36), де похідні по всім осям, за винятком нормалi N, дорівнюють 0. Оскільки cos(α) є функція, що не перевищує по абсолютній величині 1 та приймає максимальне значення приα=0, отже очевидно, що напрямок, за яким похідна dR/dL має максимальне значення, співпадає з напрямком нормалi до поверхні постійного рівня функції R(U).
Якщо відкласти на напрямку нормалi вектор з алгебраїчною величиною, рівною похідної dR(U)/dL, то отримаємо вектор, що називається градієнтом скалярної функції R(U) в точці U.
Основною властивістю градієнту функції R(U), що позначається як grad R(U) або DR(U), є те, що вектор DR(U) в кожній точці області визначення функції R(U) спрямований за напрямком нормалi до поверхні рівня, проведеної крізь цю точку, та за алгебраїчною величиною дорівнює похідній від зазначеної функції за напрямком нормалi.