

9.6 Генераторы сигналов на оу
Генераторы сигналов являются неотъемлемым элементом значительной части электронных устройств. Это могут быть как генераторы синусоидальной формы, так и генераторы сигналов специальной формы для различного рода измерительных и индикаторных устройств. В зависимости от конкретного применения к генераторам предъявляются самые разнообразные требования. Так для генераторов синусоидальных сигналов – это точность, монохромность и стабильность заданной частоты, для импульсных генераторов – это точность и стабильность заданного периода повторения и длительности импульсов, для генераторов сигналов специальной формы – это стабильность и точность воспроизведения заданного вида колебания. Во многих случаях в генераторах должна быть предусмотрена возможность внешнего управления параметрами выходного сигнала ( частотой, фазой, временными параметрами и формой колебаний). Схемотехнически электронный генератор представляет собой усилитель, охваченный положительной обратной связью. Усилители могут быть построены на дискретных транзисторах, на базе цифровых микросхем или операционных усилителей. Использование ОУ позволяет построить стабильные генераторы с весьма точным воспроизведением заданной формы выходного сигнала.
В качестве примера генераторов на ОУ рассмотрим релаксационные генераторы.
Релаксационными называют генераторы, у которых усилитель работает в переключательном режиме. К ним относятся автоколебательный и ждущий мультивибраторы, генераторы пилообразных и треугольных колебаний. Основой релаксационных генераторов на ОУ является обычно регенеративный компаратор, называемый также триггером Шмидта. Регенеративный компаратор может быть выполнен на ОУ с резистивной положительной обратной связью (рис.9.15).
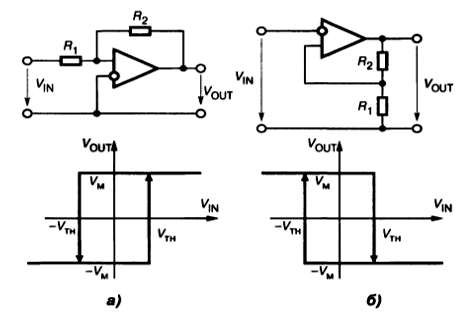
Рис.9.15. Триггер Шмидта, а) неинвертирующий б) инвертирующий
Переходная характеристика компаратора имеет гистерезис, ширина которого равна удвоенному пороговому напряжению 2VTH, причём, для схемы на рис.9.15а
VTH = VMR1/R2 ,
а для схемы на рис 9.15б
VTH = VMR1/(R1 + R2),
где VM – максимальное выходное напряжение усилителя ( напряжение ограничения или насыщения).
На рис.9.16 приведена схема и временная диаграмма работы автоколебательного мультивибратора, построенного на базе триггера Шмидта.

Рис.9.16. Автоколебательный мультивибратор: а) схема, б) временная диаграмма работы
Мультивибратор состоит из инвертирующего триггера Шмидта, охваченного отрицательной обратной связью с помощью интегрирующей RC-цепочки. Когда напряжение на конденсаторе VC достигает одного из порогов срабатывания, схема переключается и её выходное напряжение скачком принимает противоположное значение. При этом конденсатор начинает перезаряжаться в противоположном направлении, пока его напряжение не достигнет другого порога срабатывания. В этот момент схема переключится в первоначальное состояние.
Период колебаний мультивибратора равен
T = 2t1 = 2RC ln( 1 + ( 2R1/R2))
Для того, чтобы перейти от схемы автоколебательного к схеме ждущего мультивибратора, необходимо ввести дополнительно цепь запуска и цепь торможения. Назначение ждущего мультивибратора – получение одиночного импульса заданной длительности, начинающегося от фронта специального запускающего импульса. Схема одновибратора и временная диаграмма работы приведены на рис.9.17.
Длительность импульса ждущего мультивибратора (одновибратора):
tИ = RC ln( 1 + ( R1/R2)·(1 + ( VД/VМ))),
где VД – падение напряжения на открытом диоде VD1.
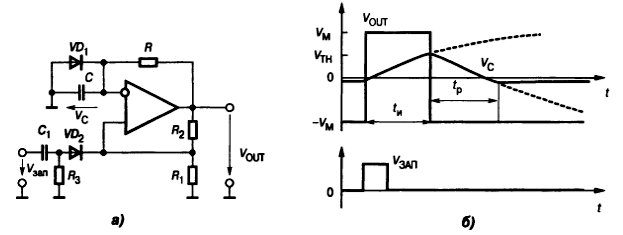
Рис.9.17. Ждущий мультивибратор : а) схема, б) диаграмма работы
Длительность импульса ждущего мультивибратора (одновибратора):
tИ = RC ln( 1 + ( R1/R2)·(1 + ( VД/VМ))),
где VД – падение напряжения на открытом диоде VD1.