

14.3.2. Зу типа 3d
Для построения ЗУ больших объемов используют другую схему и другие типы ЗЭ, которые имеют не один, а два конъюнктивно связанных входа выборки. В этом случае адресная выборка осуществляется только при одновременном появлении двух сигналов. Использование таких ЗЭ позволяет строить ЗУ с трехкоординатным выделением ЗЭ. Итак, ЗУ типа 3D отличается от 2D тем, что к каждому ЗЭ подходят три линии выборки: две координатные и одна разрядная.
Запоминающий
массив ЗУ типа 3D представляет собой
пространственную матрицу, составленную
из n плоских матриц. Каждая плоская
матрица представляет собой ЗМ для
запоминания j-х разрядов всех слов, т.е.
запоминающие элементы для одноименных
разрядов всех хранимых в ЗУ чисел
сгруппированы в квадратную матрицу из
![]() рядов по
рядов по![]() ЗЭ в каждом. Это означает, что к записи
или считыванию готов только тот элемент,
для которого сигналы адресной выборки
по координатам X и Y совпали. Для адресной
выборки ЗЭ в плоской матрице необходимо
задать две его координаты в ЗМ.
ЗЭ в каждом. Это означает, что к записи
или считыванию готов только тот элемент,
для которого сигналы адресной выборки
по координатам X и Y совпали. Для адресной
выборки ЗЭ в плоской матрице необходимо
задать две его координаты в ЗМ.
Структура матрицы j-го разряда в ЗУ типа 3D представлена на рис. 11.7. Код адреса i-й ячейки памяти разделяется на старшую и младшую части, каждая из которых поступает на свой адресный формирователь. Адресный формирователь БАВ1 выдает сигнал выборки на линию i', а БАВ2 – на линию i''. В результате в ЗМ оказывается выбранным ЗЭ, находящийся на пересечении этих линий (двух координат), т.е. адресуемый кодом i=i' / i'' (ЗЭ серого цвета). Адресные формирователи управляются сигналами Чт и Зап и в зависимости от них выдают сигналы выборки для считывания или для записи. При считывании сигнал о состоянии выбранного ЗЭ поступает по j-линии считывания к БУС (третья координата ЗЭ при считывании). При записи в выбранный ЗЭ будет занесен 0 или 1 в зависимости от сигнала записи в j-й разряд, поступающего по j-й линии от БУЗ (третья координата ЗЭ при записи). Для полупроводниковых ЗУ характерно объединение в одну линию разрядных линий записи и считывания.
Для построения n-разрядной памяти используется n матриц рассмотренного вида. Адресные формирователи здесь могут быть общими для всех разрядных ЗМ.
Запоминающие
устройства типа 3D более экономичны по
оборудованию, чем ЗУ типа 2D. Действительно,
сложность адресного формирователя с m
входами пропорциональна 2m,
отсюда сложность двух адресных
формирователей ЗУ типа 3D, пропорциональная
![]() ,
значительно меньше сложности адресного
формирователя ЗУ типа 2D, пропорциональной
2k.
Поэтому структура типа 3D позволяет
строить ЗУ большего объема, чем структура
2D.
,
значительно меньше сложности адресного
формирователя ЗУ типа 2D, пропорциональной
2k.
Поэтому структура типа 3D позволяет
строить ЗУ большего объема, чем структура
2D.
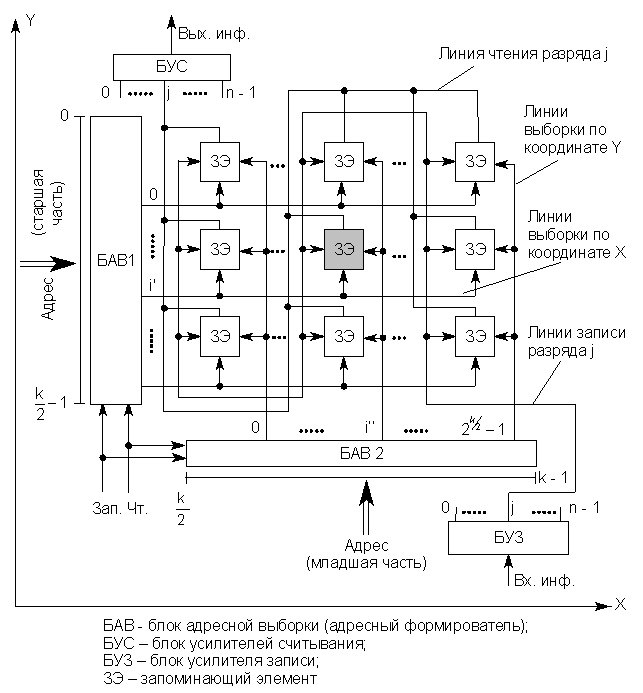
Рис.14.7. Структура ЗУ типа 3D для j-ого разряда
Структура типа 3D является наиболее удобной для построения статических ЗУ на многоэмиттерных биполярных транзисторах.
14.3.3. Зу типа 2d-m
В ЗУ типа 2D-M ЗМ для записи n-разрядных двоичных чисел состоит из n плоских матриц для одноименных разрядов всех чисел, что имеет место в ЗУ типа 3D. Однако процесс записи и считывания информации существенно отличается, поскольку в ЗУ типа 2D-M используются другие ЗЭ, к каждому из которых подходят только две координатные линии. ЗЭ таких ЗУ имеют два входа (координатный и записи) и один выход, но обычно их выход объединен со входом записи.
Структура
одноразрядного ЗУ типа 2D-M (ЗМ для j-го
разряда всех ячеек памяти) приведена
на рис. 14.8.

Рис.14.8. Структура ЗУ типа 2D-M для j-ого разряда
Как и в ЗУ типа 3D, код адреса i-й ячейки памяти разделяется на две части, одна из которых поступает на БАВ, а другая – на разрядно-адресный коммутатор (РАдрК). РАдрК является не только устройством адресной выборки j-го разряда i-й ячейки памяти, но также устройством записи и считывания информации, хранимой в ЗЭ. Если на БАВ и РАдрК не приходит сигнал обращения к памяти Обр, то на их выходных линиях не возникают действующие на ЗЭ сигналы и все ЗЭ находятся в режиме хранения. При наличии сигнала Обр выполняется считывание или запись в зависимости от сигнала Чт/Зап. При считывании БАВ выдает по линии i сигнал выборки для считывания, по которому со всех ЗЭ линии i сигналы их состояний поступают на РАдрК. Коммутатор РАдрК мультиплексирует эти сигналы и передает на выход (Вых. инф.) сигнал только с линии i. При записи БАВ выдает по линии i сигнал выборки для записи. Коммутатор РАдрК в зависимости от значения сигнала Вх. инф. выдает сигнал записи 0 или 1 на линию i и сигналы, не воздействующие на ЗЭ, в остальные линии. В результате запись производится только в ЗЭ, лежащий на пересечении координатных линий iи i, причем i/i = i (ЗЭ серого цвета).
Структура типа 2D-M является наиболее удобной для построения полупроводниковых ЗУ на МОП-структурах и широко используется в настоящее время как в динамических оперативных, так и в постоянных ЗУ.