

Rs триггер с синхронизацией по уровню
На рис. 4.15, представлено графическое обозначение RS-триггера с синхронизацией по уровню с прямыми входами. Для изменения информации в таком триггере д.б. активным («1»), помимо сигнала на одном из информационных входов, еще и сигнал на синхронизирующем входе (см. рис. 4.15,б).
Как видно из представленных временных диаграмм работы этого триггера, момент его переключения (перехода из одного состояния в другое) определяется моментом появления сигнала единичного уровня на одном из информационных входов, при условии наличия «1» на синхронизирующем входе, или моментом установления «1» на синхронизирующем входе, при условии присутствия «1» на одном из информационных входов. Это справедливо для триггеров положительной логики с любой логикой работы с синхронизацией по уровню.
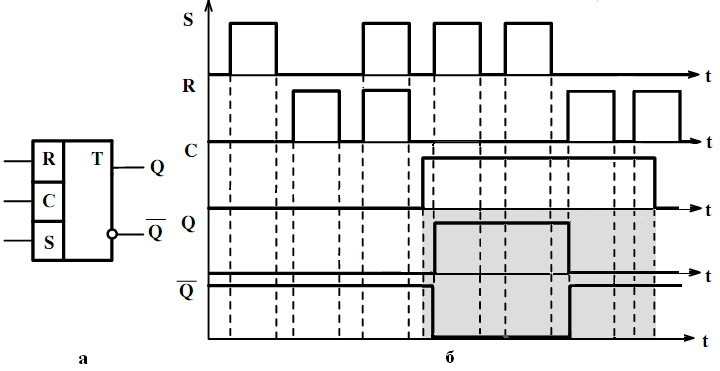
Рис. 4.15. Графическое обозначение синхронного триггера (а) и временные диаграммы его работы (б)
Синхронный rs триггер с синхронизацией по фронту
В отличие от синхронного триггера с синхронизацией по уровню, момент переключения триггера с синхронизацией по фронту определяется моментом переключения сигнала на синхровходе при условии наличия в этот момент активного уровня на одном из управляющих его входов. Если на момент действия активного для данного типа триггера фронта на управляющих его входах не будет присутствовать активный уровень сигнала, то триггер останется в режиме хранения.

Рис. 4.16. Графическое обозначение синхронного RS триггера с синхронизацией по переднему (а) и заднему (б) фронту и временные диаграммы их работы, соответственно, (в) и (г).
С учетом того, что существует два момента переключения синхросигнала: переход из состояния «0» в состояние «1» и из состояния «1» в состояние «0», существует две разновидности таких триггеров. На рис. 4.16,а представлено графическое обозначение синхронного RS триггера с синхронизацией по переднему фронту (из «0» в «1») и временные диаграммы его работы в момент переключения (рис. 4.16, в). На рис. 4.16,б и 4.16,г представлены, соответственно, графическое обозначение синхронного RS триггера с синхронизацией по заднему фронту (из «1» в «0») и временные диаграммы его работы.
МS-триггеры
Рассмотренные триггерные устройства, относящиеся к классу одноступенчатых триггеров, содержат только одну БЯ. Как только на входе одноступенчатого триггера изменяется установочная комбинация, на выходах немедленно (без учета переходных процессов) изменяются выходные уровни, свидетельствующие об изменении состояния триггера. Подобная реакция в ряде случаев недопустима. В общем случае она не позволяет управлять выработкой новых значений установочных входов собственным действующим состоянием, а также состояниями всех других переключаемых в том же такте триггеров. В частности, одноступенчатые триггеры нельзя непосредственно использовать в сдвигающих регистрах, в одноразрядных пересчетных схемах по модулю 2 и т.д.
Во всех подобного рода схемах используются двухступенчатые триггеры, содержащие не менее двух БЯ. Такие триггеры называют MS – триггерами (Master–Slave – ведущий-ведомый). Оба триггера функционируют как синхронные триггеры со статическим управлением (рис. 4.17).

Рис. 4.17. Схема функциональная двухступенчатого триггера
Если на синхронизирующем входе С=1, ведущий триггер устанавливается в состояние, соответствующее сигналам, поступающим на информационные входы. Ведомый триггер, имеющий инверсный синхронизирующий вход, при этом невосприимчив к информации, поступающей на его вход с выхода ведущего триггера. Он продолжает находиться в состоянии, в которое был ранее установлен (в предыдущем тактовом периоде). При изменении значения С (с «1» на «0») ведущий триггер отключается от информационных входов и перестает реагировать на изменения сигналов на этих входах; ведомый триггер устанавливается в состояние, в котором находится ведущий триггер. С этого момента на выходах устанавливаются значения, соответствующие входным сигналам, поступавшим к моменту рассматриваемого фронта сигнала на синхронизирующем входе.
Таким образом, управление процессами в триггере с двухступенчатым запоминанием информации за время тактового периода осуществляется двумя фронтами сигнала на синхронизирующем входе: на положительном фронте происходит установка ведущего триггера, на отрицательном – ведомого.
МS-триггеры строятся на основе двухступенчатых синхронных RS-, JK-триггеров и других. Ниже рассматриваются двухступенчатые триггеры на основе перечисленных триггеров.
Синхронный двухтактный RS-триггер. Устойчивая работа однотактного RS-триггера в произвольной схеме возможна только при условии, что информация в триггер заносится после завершения передачи информации о прежнем его состоянии в другой триггер. Для этого приходится использовать две серии находящихся в противофазе синхроимпульсов. Этот принцип обмена информацией реализован в двухтактных RS-триггерах (рис. 4.18).

Рис. 4.18. Схема функциональная двухтактного RS-триггера на элементах И-HE (а) и его условное графическое обозначение (б)
При поступлении
на вход импульса С=1 входная информация
заносится только в первый однотактный
RS-триггер,
а второй триггер при этом будет хранить
информацию, относящуюся к предыдущему
периоду представления. По окончании
действия импульса синхронизации (![]() =0,
=0,![]() =1)
первыйRS-триггер
перейдет в режим хранения, а второй
перепишет из него новое значение
выходного сигнала. Двухтактный триггер
изменит свое состояние только после
окончания действия импульса синхронизации
(переход в режим хранения информации).
Для установки триггера в состояние 0
или 1 без использования синхроимпульсов
в схему введены дополнительные входы
=1)
первыйRS-триггер
перейдет в режим хранения, а второй
перепишет из него новое значение
выходного сигнала. Двухтактный триггер
изменит свое состояние только после
окончания действия импульса синхронизации
(переход в режим хранения информации).
Для установки триггера в состояние 0
или 1 без использования синхроимпульсов
в схему введены дополнительные входы
![]() и
и![]() не синхронизируемой установки.
не синхронизируемой установки.