

Курс теоретической механики 2007 (Рус)
.pdfГ Л А В А IV
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТЕЛА
§ 1. Уравнения плоскопараллельного движения тела
Движение тела называется плоскопараллельным, если точки тела движутся в плоскостях, параллельных некоторой неподвижной плоскости По (рис.29).
Выберем некоторую точку М тела. Она движется в плоскости П, параллельной плоскости По . Опустим из этой точки перпендикуляр на плоскость По
. Пусть в основании Рис.29 перпендикуляра
находится точка Мо этого тела. Отрезок ММо , перпендикулярный плоскости По в начальный момент, будет оставаться таковым и в дальнейшем движении, так как иначе по крайней мере одна из точек М или Мо должна была бы выйти из своей плоскости. Отсюда следует, что все точки тела, лежащие на этом перпендикуляре, движутся по одинаковым траекториям и в каждый момент времени имеют геометрически равные скорости и геометрически равные ускорения. Поэтому вместо того чтобы изучать плоскопараллельное
движение тела можно изучать движение точек, лежащих в основании таких перпендикуляров, т.е. движение плоской фигуры, образующейся при пересечении тела плоскостью По, в этой плоскости. Проведем в плоскости По неподвижную систему координат хоОуо (рис.30). Выберем некоторую точку А плоской фигуры и проведем через эту точку оси подвижной системы координат хАу, которые при движении плоской фигуры должны оставаться параллельными осям неподвижной системы хоОуо , т.е. Ахо ||Ох, Ауо ||Оу. Рассмотрим теперь аналогично §1 главы III движение плоской фигуры как сложное: движение плоской фигуры относительно неподвижной системы координат хоОуо будем называть абсолютным,
91

движение ее относительно подвижной системы координат хАу – относительным, а движение подвижной системы координат хАу
|
относительно |
|
неподвижной |
|||
|
системы координат хоОуо |
– |
||||
|
переносным. |
Заметим, |
что |
|||
|
переносное |
движение |
является |
|||
|
поступательным, так как оси |
|||||
|
подвижной системы координат все |
|||||
|
время |
остаются |
параллельными |
|||
|
осям неподвижной, а относи- |
|||||
|
тельное |
движение |
– |
вращением |
||
|
вокруг неподвижной оси, так как |
|||||
|
точка А плоской фигуры остается |
|||||
Рис.30 |
неподвижной относительно под- |
|||||
|
вижной системы координат так же, |
|||||
как и ось, проходящая через эту точку и перпендикулярная плоскости По. Таким образом, плоскопараллельное движение тела
представлено в виде суперпозиции (наложения) двух движений : переносного - поступательного и относительного – вращения вокруг неподвижной оси. Точка А плоской фигуры, являющаяся началом подвижной системы координат, называется полюсом разложения плоскопараллельного движения тела на поступательное и вращательное.
Для записи уравнений плоскопараллельного движения тела необходимо, очевидно, составить уравнения переносного и относительного движений. Поступательное движение определяется движением одной точки тела (например, точки А), а вращение – угловой координатой, которую можно задать как угол между осью х и каким либо отрезком АВ плоской фигуры (рис.30). Таким образом,
уравнения плоскопараллельного движения выглядят так: |
|
x0A = f1 (t), y0A = f2 (t), φ = f3 (t). |
(81) |
§ 2. Независимость угловой скорости относительного вращения от выбора полюса разложения
Теорема. Угловая скорость относительного вращения не
зависит от выбора полюса разложения.
Доказательство. Возьмем два различных полюса разложения А1 и А2 , затем – некоторую точку плоской фигуры В (рис.31). При выборе
92
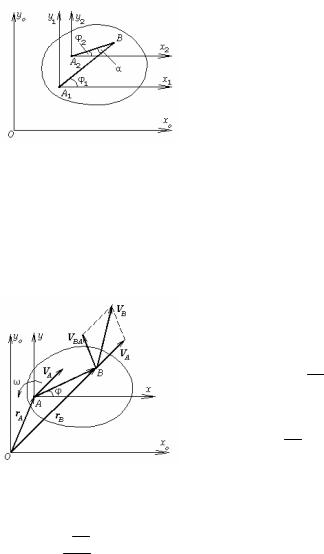
полюса А1 относительное вращение определяется углом φ1 между осью х1 и отрезком А1В, а при выборе полюса А2 – углом φ2 между осью х2 и отрезком А2В. Из чертежа следует,
что
φ1 = φ2 + α , |
(82) |
где α – угол между отрезками А1В и А2В. Заметим, что α = const, так как точки А1 , А2 и В являются точками плоской фигуры, полученной пересечением абсолютно твердого тела плоскостью По. Дифференцируя (82) по времени, получим
Рис.31
ω1 = ω2,
что и требовалось.
§ 3. Вторая формула Эйлера
Пусть А – полюс разложения плоскопараллельного движения на поступательное и вращательное, а В – точка плоской фигуры (рис.32). Из рисунка следует, что
rB = rA + AB |
(83) |
Здесь rA и rB – радиус-векторы точек А и В в неподвижной системе
координат, а AB – радиус-вектор точки В в подвижной системе коор -
Рис.32 динат. Продифференцировав (83) по времени получим
VB = VA + VBA , |
(84) |
где VBA = d AB , что представляет собой скорость точки В в относи- dt
93

тельном вращении плоской фигуры вокруг оси Аz, перпендикулярной плоскости чертежа и проходящей через точку А.
Таким образом, скорость любой точки плоской фигуры равна
скорости произвольно выбранного полюса, геометрически сложенной со скоростью этой точки в относительном вращении плоской фигуры вокруг оси, перпендикулярной фигуре и проходящей через полюс.
Используя первую формулу Эйлера (§5 главы II), можем записать
|
|
|
|
|
|
VBA = [ω, AB ], |
(85) |
||||
причем вектор ω направлен вдоль оси вращения Аz, поэтому |
|
||||
|
|
|
|
||
|VBA| = |ω|| AB |, |
(86) |
||||
так как ω AB .
Замечание. Скорость VBA = [ω, AB ] перпендикулярна AB , так
как векторное произведение перпендикулярно каждому из перемножаемых векторов.
Тогда (84) можно записать так:
|
|
|
|
VB = VA + [ω, AB ]. |
(87) |
||
Формула (87) (или же две формулы (84) и (85)) и представляет собой вторую формулу Эйлера.
Следствия.
Если скорости двух точек плоской фигуры геометрически равны в какой-то момент времени, то скорости всех точек плоской
фигуры геометрически равны в этот момент времени.
Доказательство. Пусть VB = VA . Из (84) и (86) имеем ω = 0. Возьмем теперь произвольную точку С плоской фигуры и запишем для нее вторую формулу Эйлера (87):
VС = VA + [ω, AC ] = VA ,
откуда и следует справедливость следствия.
Если скорости всех точек плоской фигуры становятся геометрически равными в какой-то момент времени, то говорят, что фигура совершает мгновенно поступательное движение в этот
94

момент.
1)Проекции скоростей двух точек плоской фигуры на ось,
проходящую через эти точки, равны.
Доказательство. Спроектируем равенство (84) на направление вектора AB . Учитывая, что VBA AB , получаем
npAB VA = npAB VB ,
что и требовалось.
§ 4. Мгновенный центр скоростей (мгновенный центр вращения)
Теорема. Если угловая скорость относительного вращения отлична от нуля в какой-то момент времени, то существует точка, причем единственная, скорость которой равна нулю в этот
момент времени.
Доказательство. Пусть скорость некоторой точки А плоской фигуры равна VA (рис.33). Проведем перпендикуляр к VA через точку
А и отложим вдоль него отрезок АР = VA / ω . |
Найдем величину |
скорости VРA точки Р в относительном вращении вокруг точки А: |
|
VPA = ω · AP = VA , |
(88) |
т.е. величины векторов VA и VPA равны. |
|
Вектор VPA перпендикулярен отрезку АВ, а значит, параллелен вектору VA . Учитывая направление относительного вращения (см.
рис.33), приходим |
к |
выводу, |
что |
||
направление |
векторов |
VA |
|
и |
VPA |
противоположны. Принимая |
во |
внимание |
|||
(88), можно записать |
|
|
|
|
|
VPA = ─ VA . |
|
|
|
|
|
Используем |
теперь |
вторую |
формулу |
||
Эйлера для нахождения скорости точки Р:
Рис.33
VP = VA + VPA = 0
Докажем, что точка плоской фигуры, скорость которой равна нулю в данный момент времени единственна. Допустим противное, т.е. что существует еще одна точка Р/ плоской фигуры, скорость которой также равна нулю в этот момент времени, т.е. VP’ = 0. Тогда
95

оказывается, что VP’ = VP = 0 , и по первому следствию из второй формулы Эйлера получаем, что скорости всех точек плоской фигуры обратились в нуль, т.е. фигура остановилась и угловая скорость ω в этот момент времени также оказалась равной нулю, что противоречит условию теоремы. Это значит, что наше допущение о неединственности точки с нулевой скоростью неверно.
Теорема доказана. Введем определение:
Точка плоской фигуры , скорость которой равна нулю в данный момент времени называется ее мгновенным центром скоростей (при условии, что эта точка единственна).
§ 5. Картина распределения скоростей точек плоской фигуры
Возьмем в качестве полюса разложения мгновенный центр скоростей Р. Тогда вторая формула Эйлера для произвольной точки А плоской фигуры запишется так:
VА = VР + VAР = VAР ,
так как VР = 0. Таким образом, скорость точки Рис.34 плоской фигуры совпадает со скоростью относи-
тельного вращения фигуры вокруг мгновенного центра скоростей. Учитывая замечание в §3 и формулу (86), приходим к заключению, что имеют место два утверждения:
1)скорости точек плоской фигуры перпендикулярны отрезкам, соединяющих их с мгновенным центром скоростей;
2)величины скоростей точек плоской фигуры пропорциональны длинам отрезков, соединяющих их с мгновенным центром скоростей.
Всоответствии с этими правилами построена картина
распределения скоростей точек плоской фигуры (рис.34). Она совпадает с картиной распределения скоростей точек фигуры, вращающейся вокруг оси, перпендикулярной плоскости фигуры и проходящей через мгновенный центр скоростей. Поэтому мгновенный центр скоростей носит еще название мгновенного центра вращения.
96

§ 6. Построение мгновенного центра скоростей
Рассмотрим построение мгновенного центра скоростей в различных частных случаях.
1. Скорости двух точек плоской фигуры не параллельны. Используя утверждение 1 предыдущего параграфа, приходим к
выводу, что мгновенный центр скоростей находится в точке пересечения перпендикуляров к скоростям. Таким образом,
если скорости двух точек плоской фигуры не паралллельны, то для нахождения мгновенного центра скоростей необходимо провести перпендикуляры к ско-
|
ростям и найти их точку иересечения. |
Рис.35 |
Этот способ называется «правилом двух |
|
перпендикуляров». |
2.Скорости двух точек плоской фигуры перпендикулярны отрез
|
ку, |
соединяющему |
эти точки, |
|
|
и |
не равны |
(т.е. VA ||VB, но |
|
|
VA ≠ VB ). |
|
|
|
|
|
В этом случае для построения |
||
|
мгновенного |
центра |
скоростей |
|
|
необходимо воспользоваться ут- |
|||
|
верждением 2 предыдущего па- |
|||
|
раграфа. Мгновенный центр ока- |
|||
|
зывается на пересечении отрезка |
|||
|
АВ |
(или его |
продолжения) и |
|
Рис.36 |
прямой, проходящей через кон- |
|||
|
цы векторов скоростей, отложен- |
|||
ных в некотором масштабе.
3. Скорости двух точек плоской фигуры геометрически равны (т.е. VA = VB). Как вытекает из первого следствия из второй формулы Эйлера, в этом случае фигура совершает мгновенно поступательное движение и мгновенный центр скоростей не существует (рис.37).
97
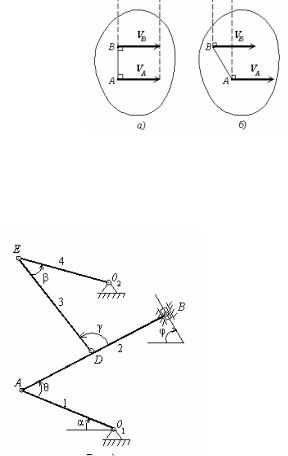
Рис.37
§7. Определение скоростей точек плоского механизма
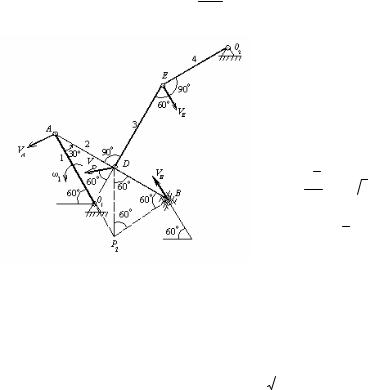
Задача. Плоский механизм состоит из стержней 1, 2, 3, 4 и ползуна В, соединенных друг с другом и опорами О1 и О2 шарнирами (рис. 38).
Дано α=60ο, β=150ο, γ=90ο, φ=60ο,
θ=30ο, l1=0,4м, l2=1,2м, l2=1,4м, l3=1,4м, l4=0,6м, ω1=2с-1.
Необходимо найти ωАВ, VВ, VE.
Решение.
Решение начинаем с построения положения механизма в соответствии с заданными углами. Построение начинаем с угла α – откладываем его от горизонтали против часовой стрелки. Вдоль полученного направления откладываем в масштабе l1. В результате получаем положение точки А. От полученного направления стерж-
Рис.38 ня 1 откладываем против часовой стрелки (как указано на чертеже) угол β и получаем направление стержня 2. Отложив в этом
направлении длину l2, находим положение точки В и так далее (заметим только, что точка D – середина стержня 2). Результат этого построения приведен на рис. 39).
Стержень О1А вращается вокруг неподвижной оси, перпендикулярной плоскости чертежа и проходящей через точку О1. Скорость точки А направлена перпендикулярно стержню О1А, так как она движется по окружности, центр которой находится в точке О1.
98
Величина определяется по формуле для скорости точки вращающегося тела
VA = ω1l1 = 0,8 м/с2.
Скорость точки В направлена вдоль оси ползуна, т.е. под углом 30о к горизонтали. Таким образом, известны направления скоростей двух точек стержня АВ. Они не параллельны друг другу. Поэтому мгновенный центр скоростей этого стержня Р2 находится на пересечении перпендикуляров к скоростям точек А и В. Угловая скорость стержня АВ определяется по формуле
ωAB = VA
AP2
Длина отрезка АР2 может быть найдена из треугольника АВР2. Он прямоугольный, так как отрезок ВР2 проведен перпендикулярно VB, а она параллельна АР2.
Тогда
AP2 = AB cos300 =

 3
3
= l2 2 = 0,6 3м
3м
Следовательно, ωAB = 4 / 3
 3 с-1.
3 с-1.
Заметим, что треугольник DBP2 равносторон-
Рис.39 ний, так как DB=l2 / 2, поскольку точка D –
середина отрезка АВ, и ВР2=l2 / 2 как катет, противолежащий углу 30о. Кроме того, угол между этими отрезками равен 60о. Отсюда следу-
ет, что
V |
|
= V |
|
= ω |
|
BP = ω |
|
l2 |
= |
0,8 |
= 0,462 м/с2 |
|
D |
B |
AB |
AB 2 |
|
||||||||
|
|
|
2 |
3 |
|
|||||||
Нетрудно выяснить, что вектор VD образует угол 60о с направлением отрезка ЕD. Кроме того, вектор VE также образует угол 60о с отрезком ED, так как VE O2 E , а угол O2ED равен 150о. Тогда
99
из следствия из второй формулы Эйлера, которое заключается в том, что проекции скоростей двух точек плоской фигуры на прямую, проходящую через эти точки, равны, следует
VD cos600 = VE cos600 , т.е. VE = VD = 0,462 м/с2
100