

Курс теоретической механики 2007 (Рус)
.pdf
|
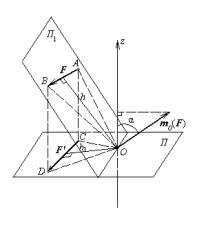
|[r, F] |= Fr sin α . |
|
(3) |
|
Так как треугольник |
ОАВ |
|
|
прямоугольный (рис. 10), то |
||
|
rsinα=h. |
Отсюда следует, что |
|
|
правые части формул (2) и (3) |
||
|
равны, а, следовательно, |
|
|
|
| mo (F) |=|[r, F] | . |
(4) |
|
Рис.10 |
Для нахождения направле- |
||
|
ния вектора [r,F] построим |
||
вектор F/ = F, исходящий из точки О. По определению векторного |
|||
произведения вектор |
[r,F] = [r,F/] должен |
быть перпендикулярен |
|
плоскости, проходящей через вектора r и F/. Но эта плоскость совпадает с плоскостью, проходящей через r и F, т.е. mo(F) и [r, F] перпендикулярны одной и той же плоскости, т.е. направлены вдоль одной и той же прямой (рис.10). Кроме того, [r,F] направлен в ту сторону, откуда виден поворот от вектора r к вектору F/ на угол α против часовой стрелки. Но с этой же стороны видно, что сила F создает вращение вокруг полюса О против часовой стрелки, т.е. mo(F) и [r,F] имеют одно и то же направление. С учетом равенства (4) получаем, что (1) справедливо.
§ 6. Теорема Вариньона для моментов двух сходящихся сил относительно полюса
Если две силы F1 и F2, а также сила F, равная их геометрической сумме, приложены в одной точке (рис.11), то момент
этой силы относительно любого полюса равен геометрической
сумме моментов сил F1 и F2 относительно того же полюса.
Доказательство. Момент силы F в соответствии с изложенным в предыдущем параграфе может быть представлен в следующем виде:
mo (F) = [r, F]
(r – радиус-вектор точки А). Но |
F1+F2 = F, и подставляя это |
равенство в предыдущее, получаем |
|
11

mo (F) = [r, F1 ]+[r, F2 ]
Но [r , F1] = mo (F1), а [r , F2]= = mo (F2) (так как F1 и F2 также приложены в точке А). Таким
образом, получаем
mo (F) = mo (F1 ) + mo (F2 )
(что и требовалось доказать).
Рис.11
§ 7. Изменение момента силы относительно полюса при перемене полюса
Задана сила F и два полюса, О (который будем называть старым) и О1 (который будем называть новым) (Рис.12). Найдем зависимость между моментами силы относительно этих полюсов. Пользуясь представлением момента в виде векторного произведения, можем
записать
|
|
mo (F) = [r1, F] . |
(5) |
|||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Очевидно (см. рис.), что |
r1 = O1O + r . |
||||
|
Подставляя это в (5) и учитывая, что |
|||||
|
|
mo (F) = [r, F] , |
|
|
|
|
Рис.12 |
получаем |
|
|
|
||
|
|
|
|
|
||
mo |
(F) = mo (F) +[O1O, F] , |
(6) |
||||
1 |
|
|
|
|
|
|
т.е. доказана
Теорема. Момент силы относительно нового полюса равен моменту силы относительно старого полюса, геометрически сложенному с векторным произведением вектора, соединяющего новый полюс со старым, на силу.
12
§ 8. Зависимость между моментом силы относительно полюса и моментом силы относительно оси
Теорема. Момент силы относительно оси, проходящей через полюс, равен проекции на эту ось момента силы относительно
полюса.
Доказательство. Модуль момента силы относительно полюса равен:
| mo (F) |= Fh = 2S OAB . |
(7) |
Абсолютная величина момента силы относительно оси равна: |
|
| mz (F) |= F' h1 = 2S OCD . |
(8) |
Методами элементарной геометрии можно доказать, что |
|
S OCD = S OAB cosα , |
(9) |
где α – угол между перпендикулярами к плоскостям Π и Π1, в которых расположены треугольники. Из (7) – (9) следует, что
| mz (F) |=| mo (F) | cos α . (10)
В ситуации, изображенной на рис.13, знаки пряmo(F) и mz(F) совпадают. Легко убедиться, что и в других случаях их знаки одинаковы.
Учитывая (10), можем записать
mz (F) = прz mo (F) (11)
(что и требовалось доказать).
Рис.13
13

§ 9. Теорема Вариньона для моментов двух сходящихся сил относительно оси
Если две силы F1 и F2, а также сила F, равная их
геометрической сумме, приложены в одной точке, то момент этой силы относительно любой оси равен сумме моментов сил F1
и F2 относительно той же оси.
Доказательство. Записываем теорему Вариньона для моментов сил относительно полюса
mo (F) = mo (F1 ) + mo (F2 )
ипроектируем это векторное равенство на ось z. Используя связь между моментами относительно полюса и оси, получаем
mz (F) = mz (F1 ) + mz (F2 ) (что и требовалось).
§ 10. Система сил. Главный вектор и главный момент системы сил
Системой сил S{F1,F2,…,Fn} называется совокупность сил,
приложенных к одному твердому телу.
Главным вектором R системы сил называется свободный вектор, равный геометрической сумме сил, входящих в систему:
n
R = ∑Fk .
k=1
Главным моментом Мо системы сил относительно полюса О называется вектор, приложенный в этом полюсе и равный геометрической сумме моментов сил системы относительно этого полюса:
|
n |
|
|
Mo = ∑mo (Fk ) . |
|
|
k=1 |
|
|
Заметим, что из формулы (11) следует, что |
|
|
прz Mo =Mz , |
(12) |
|
n |
|
|
где M z = ∑mz (Fk ) , т.е. сумма моментов |
|
|
k=1 |
|
|
сил относительно оси z (Мz будем называть |
|
Рис.14 |
главным моментом системы сил относи- |
|
14

тельно оси z).
Таким образом, главный момент системы сил относительно
оси равен проекции на эту ось главного момента системы сил относительно полюса, лежащего на этой оси.
§ 11. Изменение главного момента системы сил относительно полюса при перемене полюса
Теорема. Главный момент системы сил относительно нового полюса O1 равен главному моменту системы сил относительно старого полюса O, сложенному с векторным произведением
вектора, соединяющего новый полюс со старым, на главный вектор системы сил, т.е.
|
|
|
|
Mo = Mo +[O1O, R] . |
(13) |
||
1 |
|
|
|
Доказательство. Для каждой силы, входящей в систему, можно записать теорему об изменении ее момента при перемене полюса
mo1 (Fk ) = mo (Fk ) +[O1O, Fk ] (k = 1,2,..., n) .
Суммируя все эти равенства по k и вынося общий множитель O1O за знак суммы, получаем
n
Mo1 = Mo +[O1O, ∑Fk ]
k=1
что совпадает с (13).
Следствие. Если главный вектор системы сил равен нулю, то ее главный момент не зависит от полюса, т.е. является свободным вектором.
Доказательство. Если R = 0, то из (13) следует Mo1 = Mo , чем и завершается доказательство, так как O1 и О два произвольных полюса.
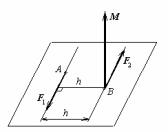
§ 12. Пара сил и ее момент
Парой сил называется система из двух сил, лежащих на параллельных прямых, направленных в противоположные стороны и равных по величнне. Расстояние между линиями действия сил пары называется плечом пары. Оно предполагается обязательно отличным от нуля.
Силы, образующие пару, удовлетворяют соотношению
15
F1 = - F2.
Тогда главный вектор пары сил:
R = F1 + F2 = 0
По следствию из предыдущего параграфа главный момент пары сил (именуемый просто моментом пары
Рис.15 сил) не зависит от полюса, поэтому может быть вычислен в любом из них:
M = mB (F1 ) , |
(14) |
так как mB (F2 ) = 0 . Из (14) следует | M |= F1h |
(кстати, отсюда |
вытекает, что М не равен нулю, так как h ≠ 0). Учитывая направление вектора mB (F1 ) , можно сделать следующий вывод:
момент пары сил – это неравный нулю свободный вектор, а) перпендикулярный плоскости пары,
б) направленный в ту сторону, откуда видно, что пара сил создает вращение против часовой стрелки, в) равный по величине произведению величины одной из сил пары на плечо пары.
Если воспользоваться формулой (12), то можно прийти к следующему выводу:
момент пары сил относительно любой оси, перпендикулярной плоскости пары, имеет одно и тоже значение, равное модулю момента пары и имеющее знак, определяемый по следующему правилу:
если из положительного направления оси видно, что пара создает вращение против часовой стрелки, то принимается знак «плюс», в противном случае принимается знак «минус».
§ 13. Элементарные операции
Элементарными называются следующие операции над системами сил:
1) добавление к системе сил двух прямопротивоположных сил (см. §4),
16

2)отбрасывание от системы сил двух прямопротивоположных сил (если таковые имеются),
3)замена двух сил, приложенных в одной точке, одной силой, равной их геометрической сумме и приложенной в той же точке
(т.е. по «правилу параллелограмма»).
Свойства.
1.Перенос силы вдоль ее линии действия можно осущест-
вить при помощи элементарных операций.
Доказательство. Добавим к силе F в точке В, куда мы желаем перенести силу, две прямопротивоположные
cилы F1 и F2, причем F1 = F, Рис.16 а F2 = - F. Получаем систе-
му из трех сил, из которых F и F2 также являются прямопротивоположными. Отбросим их, используя вторую элементарную операцию. В результате останется только сила F1, равная силе F и приложенная в точке В.
2. Разложение силы на две составляющие по правилу параллелограмма можно осуществить при помощи элементарных
операций.
Доказательство. Отложим от произвольной точки А отрезок АВ, изображающий силу F в некотором масштабе. Пусть заданы направления Ak и Аm, вдоль которых необходимо разложить силу F на составляющие. Построим параллелограмм ACBD с диагональю АВ и сторонами AC и AD, лежащими на Ak и Am. Используем теперь пер-
вую элементарную операцию: добавим силу F1, равную в выбранном масштабе отрезку AD, и прямопротивоположную
ей силу F1/ .
Обозначим конец силы
F1/ буквой Е. Нетрудно
убедиться в том, что Рис.17 AECB также является
параллелограммом. Используем теперь третью элементарную операцию: заменим
силы F и F1/ силой F2, совпадающей в выбранном масштабе с
17
отрезком АС. В результате построений получаем силы F1 и F2, направленные вдоль направлений Ak и Am, сумма которых равна силе
F.
Следствие. Если система сил S2 получена из системы сил S1 при помощи элементарных операций, то систему сил S1 можно
получить из S2 также при помощи элементарных операций.
Доказательство. В самом деле, первые две элементарные операции являются обратными друг другу. Обращением же третьей элементарной операции, как показывает свойство 2, является некоторая совокупность элементарных операций.
§ 14. Геометрические свойства элементарных операций
Первое геометрическое свойство. Элементарные операции не
изменяют главного вектора системы сил.
Доказательство. Первые две элементарные операции не изменяют главного вектора системы сил, поскольку при этом добавляются или отбрасываются силы, геометрическая сумма которых равна нулю. При использовании третьей элементарной операции две силы заменяются одной, равной их геометрической сумме. Следовательно, общая геометрическая сумма сил, т.е. их главный вектор, остается неизменной.
Второе геометрическое свойство. Элементарные операции не
изменяют главного момента системы сил.
Доказательство. Первые две элементарные операции не изменяют главного момента системы сил, так как при этом добавляются или отбрасываются силы, сумма моментов которых относительно любого полюса равна нулю (см. §4). При использовании третьей элементарной операции две силы заменяются одной, момент которой относительно любого полюса равен геометрической сумме их моментов (см. §6). Следовательно, общая геометрическая сумма моментов относительно любого полюса, т.е. их главный момент, остается неизменной.
§ 15. Эквивалентные системы сил
Системы сил S1 и S2 называются эквивалентными (символическая запись S1 ~ S2), если одна из них может быть
получена из другой при помощи элементарных операций.
18
Заметим, что в этом определении используется следствие из §13, позволяющее не указывать в каком направлении осуществлялся переход от одной системы к другой при помощи элементарных операций
Свойства.
1.Если S1 ~ S2, то S2 ~ S1.
2.Если S1 ~ S2, а S2 ~ S3, то S1 ~ S3.
Пользуясь свойством 1, это свойство можно записать еще так
Если S1 ~ S2 и S3 ~ S2, то S1 ~ S3, т.е.
Если каждая из двух систем сил эквивалентна третьей, то они эквивалентны друг другу.
3. |
Если S1 ~ S2, то главные векторы этих систем сил и |
глав- |
|
ные |
моменты |
относительно одного и того же |
полюса |
геометрически равны, т.е. R (S1) = R (S2) и Мо (S1) = Мо (S2). |
|
||
Доказательство следует из геометрических свойств элементарных операций.
§ 16. Равнодействующая
Если система сил S эквивалентна одной силе, то эта сила
называется ее равнодействующей.
Свойства.
1. Равнодействующая геометрически равна главному вектору.
Доказательство. Обозначим систему сил, состоящую из одной равнодействующей F, символом S1. Тогда из определения равнодействующей вытекает, что S ~ S1, и из свойства 3 предыдущего параграфа получаем, что R(S) = R(S1), и поскольку система S1 состоит из одной силы F, то R(S1) = F. Таким образом, R(S) = F.
2. (Обобщенная теорема Вариньона). Если система сил имеет равнодействующую, то момент этой равнодействующей относительно любого полюса равен главному моменту систему сил
относительно этого полюса.
Доказательство. Примем обозначения предыдущего доказательства. Из свойства 3 параграфа 15 получаем Мо(S) = Мо(S1), но поскольку система S1 состоит из одной силы F, то Мо(S1) = mo(F).
Таким образом, Мо(S) = mo(F).
19

§17. Примеры построения равнодействующей
1.Две параллельные силы, направленные в одну сторону.
Пусть заданы две параллельные силы F1 и F2, приложенные в точках А
иВ и направленные в одну сторону (рис.18). Используем первую элементарную операцию: добавим две прямопротивоположные силы Р1 и Р2, также приложенные в этих точках. Затем используем третью
|
элементарную операцию: заме- |
|
|
ним силы F1 и Р1, прило- |
|
|
женные в точке А, одной силой |
|
|
Q1 = F1 + Р1, также приложен- |
|
|
ной в точке А. Аналогично |
|
|
силы F2 и Р2, |
приложен- |
|
ные в точке В, заменяем |
|
|
одной силой Q2 |
= F2 + Р2, |
|
также приложенной в точке В. |
|
|
В результате система парал- |
|
|
лельных сил F1 и F2 превра- |
|
|
щается в систему |
двух непа- |
Рис.18 |
раллельных сил Q1 и Q2, ле- |
|
|
жащих в одной плоскости. Их |
|
линии действия пересекаются в точке О. Перенесем силы Q1 и Q2 вдоль их линий действия в точку О (это можно сделать при помощи элементарных операций), затем опять применим третью элементарную операцию: заменим силы Q1 и Q2, приложенные в точке О силой F, которая и является равнодействующей сил F1 и F2. Ее можно (т.е. используя элементарные операции) перенести в точку С пересечения ее линии действия с отрезком АВ. Ее положение на отрезке АВ определяется отношением длин отрезков АС и СВ. Из подобия
треугольников AED и ОАС имеем |
P1 |
|
= |
|
F1 |
. Аналогично из подобия |
||||
AC |
OC |
|||||||||
|
|
|
|
|
|
|||||
треугольников BMN и OCB получаем |
|
|
P2 |
= |
F2 |
. Разделим вторую |
||||
|
|
|
|
|||||||
|
|
|
|
CB |
|
OC |
||||
пропорцию на первую. В результате будем иметь (так как Р1 = Р2)
AC = F2
CB F1
Заметим, что поскольку F = R = F1 + F2, то равнодействующая F должна быть параллельна этим силам и модуль ее может быть найден из формулы
20