

Курс теоретической механики 2007 (Рус)
.pdfma = P,
проектируем его на ось z, направленную к центру Земли,
ma=P |
(6) |
и подставим вместо Р выражение (5). В результате будем иметь
a = γ |
M |
. |
(7) |
|
|||
|
R2 |
|
|
Из (7) следует, что ускорение свободного падения тела не зависит от массы этого тела − факт, экспериментально открытый еще Галилеем. В дальнейшем будем обозначать его буквой g. Тогда (6) запишется так:
P = mg. |
(8) |
Эта формула выражает зависимость между массой и весом тела.
§3. Дифференциальные уравнения движения материальной точки. Решение второй задачи динамики
В классической механике силы, действующие на материальную точку, считаются зависящими от положения точки, ее скорости и времени, т.е. в общем случае
|
F = F (r, v, t), |
(9) |
|||||
(r – радиус-вектор точки). |
|
|
|
|
|
||
Тогда основное уравнение динамики (3) запишется так: |
|
||||||
m |
d 2 r |
= |
n |
F |
|
(r, v, t) . |
(10) |
|
∑ |
k |
|||||
|
dt 2 |
|
|
|
|||
|
|
|
|
|
|||
|
|
|
k=1 |
|
|
|
|
Спроектировав (10) на оси декартовой системы координат, получим дифференциальные уравнения движения точки:
111

|
n |
|
|
&& |
& |
& & |
|
mx |
= ∑Fk,x (x, y, z, x, y, z,t), |
|
|
|
k=1 |
|
|
|
n |
|
|
&& |
& |
& & |
(11) |
my |
= ∑Fk,y (x, y, z, x, y, z,t), |
||
k=1
n
m&z& = ∑Fk,z (x, y, z, x&, y&, z&,t).
k=1
Если силы, действующие на точку, известны, то выражения в правых частях (11) представляют собой заданные функции своих аргументов, и нахождение уравнений движения
x = f1 (t), y = f2 (t), z = f3 (t)
сводится к интегрированию дифференциальных уравнений (11). Поэтому последовательность решения второй задачи динамики
материальной точки состоит из следующих операций:
1)составление дифференциальных уравнений движения
точки;
2)интегрирование дифференциальных уравнений;
3)определение постоянных интегрирования из заданных начальных условий;
4)нахождение искомых величин и исследование полученных результатов.
§4. Примеры решения второй задачи динамики
1. Прямолинейное движение точки под действием силы, зависящей от времени.
Задача. Тело массой m = 2 кг начинает двигаться из состояния покоя вдоль горизонтальной шероховатой плоскости, коэффициент трения которой равен f = 0.1, под действием силы F = 4t2 (Н). Найти
закон движения тела.
Решение. Выберем начало отсчета в начальном положении тела и направим ось х в сторону движения. Тогда начальные условия движения тела запишутся так:
Рис.3
112

х = 0, V = 0 при t = 0. |
(12) |
Показываем на чертеже все силы, действующие на тело. Это вес Р, заданная сила F, нормальная реакция поверхности N и сила трения Fтр. Составляем основное уравнение динамики
ma = F+P+N+Fтр
и проектируем его на ось х
m&x& = F − F . |
(13) |
тр |
|
Разделив (13) на m и учитывая, что по закону Кулона Fтр = fP, получаем
&x& = |
1 |
F − fg . |
(14) |
|
|||
|
m |
|
|
После подстановки заданных значений m, f и F уравнение (14) принимает следующий вид:
&x& = 2t 2 − 0.98 |
(15) |
(g принято равным 9,8 м/с2).
Это и есть дифференциальное уравнение движения точки. Умножив его на dt и проинтегрировав, получим
& |
2 |
t |
3 |
− 0.98t + C1 . |
(16) |
|
|
||||
x = |
3 |
|
|||
|
|
|
|
|
Значение постоянной интегрирования С1 найдем из начальных условий (12), учитывая, что V = Vx = x& = 0 при t = 0. Подставляя это равенство в (16), находим, что С1 = 0. Умножая теперь (16) на dt и интегрируя еще раз, приходим к следующему равенству:
x = |
1 |
t 4 − 0.49t 2 + C |
|
. |
(17) |
|
2 |
||||
6 |
|
|
|
||
|
|
|
|
||
Постоянную интегрирования С2 находим из условия х = 0 при t = 0. Подставляя это в (17), находим, что С2 = 0. Таким образом, уравнение движения тела имеет следующий вид:
x = 1 t 4 − 0.49t 2 . 6
2.Прямолинейное движение точки под действием силы,
зависящей от скорости.
Задача. Некоторое тело массой m = 2 кг опускается внутри гладкой наклонной трубы, заполненной жидкостью, без начальной скорости
113

(рис.4). Полагая, что сила сопротивления жидкости движению груза определяется соотношением R = 0,4V (Н) и пренебрегая выталкивающей силой жидкости, найти скорость тела спустя 10 с после
начала движения.
Решение. Показываем на чертеже силы, действующие на тело, и состав-
Рис.4 ляем основное уравнение динамики точки
ma = P+N+R. |
(18) |
Направляем ось х вдоль направления движения и проектируем (18) на эту ось. Учитывая, что V = Vx = x& , находим
mV& = Pcos 60o – R . |
(19) |
Подставляя сюда исходные данные, получаем дифференциальное уравнение:
dV = 4,9 − 0,2V . dt
Это уравнение с разделяющимися переменными. Приводим его к следующему виду:
dt = |
|
dV |
|
|
|
|
− 0,2V |
|
4,9 |
||
и интегрируем левую часть по t, а правую по V. В результате будем иметь
t = −5ln | 4,9 − 0,2V | +C . |
(20) |
Используем начальное условие: V = 0 при t = 0. Из (20) получаем
С = 5 ln 4,9.
Подставим это в (20) и произведем потенцирование:
|24,5−V | = 24,5 e−5t. |
(21) |
114
Из (21) следует, что с течением времени V возрастает от нуля постепенно приближаясь 24,5 м/с, но теоретически ни при каком конечном t этого значения не достигает. Поэтому знак абсолютной величины в (21) может быть опущен. В результате получаем
V = 24,5 (1−e−5t) (м/с). |
(22) |
Равенство (22) показывает, что практически уже через несколько секунд после начала движения V неуловимо мало отличается от своего предельного значения. При t =10 с V = 24,5 м/с.
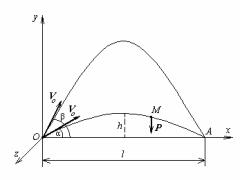
3.Баллистическая задача.
Рассмотрим движение тела (снаряда), выброшенного с начальной скоростью Vo из точки О горизонтальной плоскости под углом α к этой плоскости. Сопротивлением воздуха пренебрегаем, кроме того, будем считать, что сила тяжести снаряда всюду одна и та же, т.е. что высота полета снаряда не очень велика. Необходимо при заданных α и Vo найти дальность полета снаряда l и время его полета Т, а также при заданных Vo и l найти угол выстрела α (т.е. решить задачу
прицеливания).
Решение. Проведем вертикальную плоскость через вектор Vo. В этой плоскости через точку проводим горизонтальную ось Ох и вертикальную ось Оу. Ось Оz проводим перпендикулярно плоскости Оху. На снаряд, который мы считаем материальной точкой, действует только одна сила тяжести. Поэтому основное уравнение динамики выглядит так:
Рис.5 |
ma = P. |
Проектируя его на оси координат, получаем
&& |
&& |
&& |
= 0. |
(23) |
mx |
= 0, my |
= −P, mz |
115
Разделив |
равенства |
(23) |
на |
m |
|
и пользуясь |
тем, что |
|
& |
& |
& |
|
к |
следующим дифференциальным |
|||
Vx = x, Vy |
= y, Vz = z , приходим |
|||||||
уравнениям: |
|
|
|
|
|
|
|
|
|
|
V& |
= 0, V& |
= −g, V& |
z |
= 0. |
(24) |
|
|
|
x |
y |
|
|
|
|
|
Умножим равенства (24) на dt и проинтегрируем:
Vx = C1 , Vy = −gt+C2 , Vz = C3 . |
(25) |
Начальные условия задачи выглядят так:
x = 0, y = 0, z = 0, Vx = Vo cos α, Vy = Vo sin α, Vz = 0 при t = 0. (26)
Из (25) и последних трех равенств (26) следует
C1 = Vo cos α, C2 = Vo sin α, C3 = 0.
Тогда (25) запишется так:
x& = Vo cos α, y& = Vo sin α− gt, z& = 0 .
Умножая эти равенства на dt и интегрируя, находим
x = Vo t cos α +C4, y = Vo t sin α − gt2 / 2 + C5, z = C6 . (27)
Подставляя сюда значения x, y и z из первых трех равенств (26) и t= 0,
получаем, что
С4 = С5 = С6 = 0.
При этих значениях произвольных постоянных равенства (27) представляют собой уравнения движения снаряда:
x = Vo t cos α , y = Vo t sin α − gt2 / 2, z =0 . |
(28) |
Последнее равенство означает, что снаряд движется в плоскости Оху.
1. Найдем уравнение траектории снаряда. Для этого необходимо исключить время t из первых двух уравнений (28):
116

gx2
y = x tg α − . (29) 2Vo2 cos2 α
Таким образом, снаряд, выпущенный под углом к горизонту, при отсутствии сопротивления воздуха движется по параболе.
2.Определим горизонтальную дальность полета снаряда.
Для этого в уравнении (29) положим у = 0. Не совпадающая с началом координат точка траектории с такой ординатой имеет абсциссу
|
V 2 |
sin 2α |
|
|
l = |
o |
|
. |
(30) |
|
|
|||
g
3. Определим время полета снаряда. Для этого в первом равенстве (28) положим х равным правой части (30). В результате будем иметь
|
2Vo sin α |
|
Т = |
|
. |
|
||
|
g |
|
4.Осталось решить задачу прицеливания. Заметим, что из (30)
следует , что максимальная дальность полета снаряда достигается при α = 45о:
|
|
|
|
|
|
|
|
Vo2 |
|
|
|||||
|
|
|
|
|
|
lmax = |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пусть l≤ lmax . Тогда из (30) находим |
|
|
|||||||||||||
|
|
|
|
|
sin 2α = |
gl |
|
|
≤1, |
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
Vo2 |
|
|
|
|
|
||
откуда находим α |
|
= |
1 |
arcsin( |
gl |
), α |
|
= 90o − α |
|
. Таким образом, при |
|||||
1 |
|
|
2 |
1 |
|||||||||||
|
2 |
|
Vo2 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
l< lmax в одну |
и ту |
же цель можно попасть, стреляя по двум |
|||||||||||||
траекториям – настильной (α < 45ο) и навесной (β =90о − α > 45ο). |
|||||||||||||||
§5. Свободные колебания материальной точки |
|||||||||||||||
Восстанавливающей |
или квазиупругой |
|
называется сила, |
||||||||||||
постоянно направленная к неподвижному центру О и пропорциональная расстоянию от материальной точки М до
этого центра, т.е.
|
|
|
F = − c OM |
(31) |
|
117

( c – положительная постоянная).
Подобная сила создается растянутой или сжатой пружиной (рис.6). Здесь lo − длина недеформированной пружины. При смещении груза от точки О в любую сторону пружина стремится вернуть груз в исходное положение, при этом упругая сила пружины F пропорциональ-
Рис.6 на величине смещения ОМ с коэффициентом пропорциональ-
ности с, носящим название коэффициента жесткости пружины.
Прямолинейное движение материальной точки под действием только одной восстанавливающей силы называется свободными колебаниями Точка О (центр восстанавливающей силы)
называется центром колебаний.
Заметим, что центр колебаний является положением равновесия точки М. Действительно, в соответствии с формулой (31), если материальная точка М находится в положении О, то F оказывается равной нулю, и на точку М в этом положении вообще не действуют силы.
Проведем ось Ох из центра колебаний вдоль прямой, по которой движется точка (рис.7). Составим основное уравнение динамики точки
ma = F
и спроектируем его на ось х, учитывая, что проекция восстанавливающей силы равна
Рис.7 |
Fx = −cx. |
В результате будем иметь
m&x& = −cx . |
(32) |
Разделив (32) на m и введя обозначение
|
2 |
|
c |
|
|
k |
|
= |
|
, |
(33) |
|
|
||||
|
|
|
m |
|
|
получаем дифференциальное уравнение свободных колебаний
материальной точки
118
&x&+ k 2 x = 0 . |
(34) |
Это линейное однородное дифференциальное уранение второго порядка с постоянными коэффициентами. Составим его характеристи-
ческое уравнение :
λ2 + k2 = 0.
Так как кони его чисто мнимые λ1,2 = ± ικ, то общее решение дифференциального уравнения (34) имеет следующий вид:
x = C1 sin kt + C2 cos kt.
Сделаем подстановку C1 = a cos α, |
C2 = a sin α. В результате |
получим x = a (sin kt cos α + cos kt sin α) или |
|
x = a sin (kt + α). |
(35) |
Выражение (35) представляет собой уравнение свободных колебаний материальной точки.
Прямолинейное движение точки, совершаемое по закону x = a sin (kt + α), называется гармоническими колебаниями.
Таким образом, свободные колебания материальной точки
являются гармоническими.
Величина а, являющаяся наибольшим отклонением точки от
центра колебания, называется амплитудой.
Величина φ = kt + α называется фазой колебания, а α = φ (0)
называется начальной фазой.
Величина k называется круговой или циклической частотой
колебаний.
Промежуток времени Т, в течение которого точка совершает
одно полное колебание, называется периодом колебаний.
Это означает, что если время в формуле (35) увеличивается на Т, то аргумент синуса в этой формуле изменяется на 2π. Отсюда следует,
что kT = 2π, т.е. |
|
||||
T = |
2π |
, |
|
(36) |
|
|
|
||||
|
k |
|
|||
откуда получаем |
|
||||
k = |
2π |
, |
(37) |
||
|
|||||
|
|
T |
|
||
т.е. круговая частота равна числу полных колебаний, совершаемых
119

за 2π единиц времени.
Число ν полных колебаний, совершаемых в единицу времени,
называется частотой колебаний:
ν = 1 .
T
Очевидно,
k = 2πν.
Величины а и α определяются из начальных условий. Пусть
х = хо , V = Vo при t = 0.
Продифференцировав (35) по времени, получим
V = ak cos (kt+α). Из (35) и (40) с учетом (39) находим
a = |
x |
2 |
+ |
Vo2 |
, |
tg α = |
kxo |
. |
o |
k 2 |
|
||||||
|
|
|
|
|
Vo |
|||
|
|
|
|
|
|
|||
Из (37), (38) и (41) вытекает
(38)
(39)
(40)
(41)
1)амплитуда и начальная фаза колебаний зависят от начальных условий,
2)круговая частота и период не зависят от них.
§6. Влияние постоянной силы на свободные колебания материальной точки
Пусть теперь на материальную точку помимо восстанавливающей силы действует еще постоянная сила Р (рис.8).
Найдем новое положение равновесия О1 точки М. Очевидно, в этом положении F + P = 0, т.е.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− сOO1 + Р = 0, |
(42) |
||
Рис.8 |
|
|
откуда |
|
||||||
|
|
|
|
|
= |
P |
. |
|
||
|
|
|
OO |
(43) |
||||||
|
|
|
|
|||||||
|
|
|
1 |
c |
|
|||||
|
|
|
|
|
|
|
||||
|
|
|
|
|||||||
Обозначим δст =| OO1 | |
и назовем δст статическим смещением. |
|||||||||
Тогда из (43) следует |
|
|
|
|
|
|
|
|
||
120