

Определение места судна по расстояниям до трех ориентиров, измеренных с помощью навигационной рлс
Этот способ являетсянаиболееудобным и точным.
Измеренному расстоянию до какого-либо ориентира соответствует навигационная изолиния – окружность с центром в точке ориентира, до которого измерялось расстояние и радиусом, равным истинному значению этого расстояния.
Для получения обсервованного места достаточно одновременно (почти одновременно) измерить расстояния до трех ориентиров. Точка пересечения навигационных изолиний – окружностей (их дуг) радиусами D1, D2иD3– даст нам обсервованное место судна.
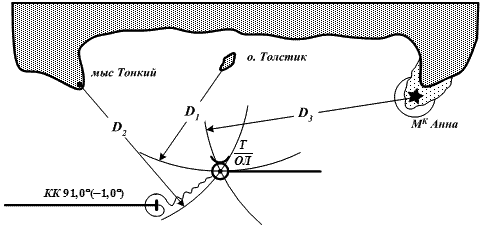
Рис. 5.28. Определение места судна по расстояниям до трех ориентиров
Выполнение способа(рис.5.28):
Включить навигационную РЛС, подобрать по путевой навигационной карте три навигационных ориентира разнесенных по горизонту.
В быстрой последовательности, с помощью навигационной РЛС, измерить расстояния до этих ориентиров, заметить время (Т) и отсчет лага (ОЛ).
Рассчитать истинные значения расстояний до ориентиров, то есть измеренные навигационной РЛС расстояния исправить ее поправкой
D1(2,3) = DP1(2,3) + ΔDP
На путевой навигационной карте провести окружности (их дуги) с центрами в местах ориентиров, до которых измерялись расстояния и радиусами, равными исправленным значениям измеренных расстояний – R1(2,3) = D1(2,3).
Точка пересечения всех трех окружностей (их дуг) и даст нам искомое обсервованное место судна. Обозначить его условным знаком (
 )
и подписать рядом с ним время (Т) и
отсчет лага (ОЛ).
)
и подписать рядом с ним время (Т) и
отсчет лага (ОЛ).На момент измерения расстояний до ориентиров (Т) нанести на карту счислимое место, обозначить невязку, снять ее направление и величину (С= 58° – 1,7 мили).
Определение места судна по пеленгу и расстоянию до ориентира
Данный способ определения места судна относится к комбинированным.
Комбинированныминазываются такие способы определения места, в которых измеряются различные навигационные параметры:
пеленг на ориентир и расстояние до него;
пеленг на ориентир Аи горизонтальный угол между ориентирамиАиБ;
пеленг на ориентир и глубина места и др.
Рассмотрим наиболее часто употребляемый на практикеспособ определения места суднапо пеленгу на ориентир и расстоянию до него (рис.5.29).
Удобство этого способа состоит в том, что для его реализации используется всего лишь один ориентир, а навигационные изолинии – прямая линия для пеленга и окружность для расстояния – пересекаются под оптимальным углом 90°.
В быстрой последовательности (с помощью НРЛС) измерить направление на ориентир (РЛП) и расстояние (дистанцию) до него. Зафиксировать время (Т) и отсчет лага (ОЛ).

Рис. 5.29. Определение места судна по пеленгу и расстоянию до одного ориентира
Исправить (при необходимости) измеренные направления (КП или РЛП) и расстояние (DР) соответствующими поправками, то есть получить истинные значения навигационных параметров
ИП = РЛП + ΔГК, ИП = ГКП + ΔГК, D = DР + ΔDР
Проложить на путевой навигационной карте изолинии:
пеленга – прямая линия, проходящая через место ориентира;
расстояния – окружность (ее дуга) радиусом R = Dс центром в месте ориентира.
В точке пересечения
навигационных изолиний условным
обозначением нанести (обозначить)
обсервованное место судна (![]() или
или![]() ),
подписать рядом с ним время (Т) и
отсчет лага (ОЛ).
),
подписать рядом с ним время (Т) и
отсчет лага (ОЛ).
На время (Т) измерения навигационных параметров (РЛП иDР) нанести на карту счислимое место судна, обозначить невязку, снять ее направление и величину (С = 102° – 2,2 мили).
Одними из наиболее распространенных способов определения места судна являются определения с помощью РНС и КНС. Береговые станции РНС или космические навигационные аппараты (спутники) создают электромагнитное поле, параметры которого (амплитуда, фаза, разность фаз и т. п.) известным образом связаны с положением приемного устройства на поверхности Земли, т. е. с географической системой координат. Приемное устройство на судне измеряет эти параметры и пересчитывает их в географические координаты.
На карте обсервованное место судна обозначают стандартным условным значком.

Как правило, счислимое и обсервованное места не совпадают. Расхождение между счислимым и обсервованным местами на один и тот же момент времени называется невязкой. Она характеризуется направлением от счислимого места на обсервованное и расстоянием между ними. На карте невязка показывается затухающей волнистой линией, соединяющей счислимое место с обсервованным.
Правила оформления графического счисления определены международным стандартом (в Украине стандарт оформления графического счисления приведен в РШСУ - 98).
Выводы
Процесс определения текущего места судна путем непрерывного и последовательного учета его движения относительно исходного места называется счислением пути судна. Место судна, полученное на основе счисления его пути, называется счислимым.
В качестве стандартной характеристики оценки точности применяется 95% круг погрешностей места с центром в оцениваемой точке, который захватывает действительное место судна с постоянной вероятностью 0,950.
Процесс получения координат места судна по данным от внешних источников называется определением места судна или обсервацией. При плавании судна в видимости берегов определение места по визуальным пеленгам, взятым одновременно на три и более ориентиров есть уверенная гарантия в надежности места судна, если все пеленги пересекутся в одной точке.
Обсервованное место судна по визуальным пеленгам на два береговых ориентира не дает уверенности в точности такой обсервации, так как два пеленга всегда пересекутся в одной точке, независимо от того есть в них промахи или нет.
При использовании способа «крюйс-пеленг»получаем не обсервованное, асчислимо-обсервованноеместо судна, так как не исключаются погрешности счисления за время плавания между замерами пеленгов.
Расстояния до видимых навигационных ориентиров в море определяются как визуально, так и с помощью технических средств.
Место судна в море можно определить по расстояниям до 3-х, до 2-х ориентиров.
Наиболее точно место судна может быть определено по расстояниям до 3-х и более ориентиров.
Наиболее быстрый и достаточно точный способ определения места судна в море по пеленгу и расстоянию до одного (точечного) ориентира по данным судовой РЛС.
Лекция 6.