

Kluwer - Handbook of Biomedical Image Analysis Vol
.2.pdfSegmentation Issues in Carotid Artery Atherosclerotic Plaque |
393 |
than others for lumen segmentation because all the typical regions, including lumens and blood vessel wall, are partitioned correctly. To further fine-tune the results, we increase the minimum region threshold as Tmin = 30 and an even “clear” result can be obtained as shown in Fig. 8.6(g).
(ii)Supervised segmentation with interactive parameter selection: Another solution for the parameter estimation in implementing QHCF algorithm into real application is to provide an interactive parameter selection interface for users. In our implementation, two modes were designed: auto and manual. In auto mode, a few empirical parameter combinations for typical applications are stored. The user can start with these predefined values and find one that can generate satisfactory results. Any further fine-tune of the segmentation performance can be achieved by switching to manual mode in which the parameters can be further adjusted.
8.3MRF-Based Active Contour Model
8.3.1 Introduction
As discussed in section 8.1, most segmentation algorithms can perform well only on certain types of practical images because of the applicability limitation of each modeling or ease of use. In this section, we will introduce a flexible and powerful framework for general-purpose image segmentation. In the course of our investigation, we use the following assumption: A successful segmentation is an optimal local contour detection based on an accurate global understanding of the whole image. This assumption stems from the fact that the global information of an image is generally crucial in local object identification, automatic searching initialization, and energy optimization. Therefore, we focused our work in three parts:
(i)Region segmentation of the whole image: This provides a reliable basis for decision-making and subsequent processing.
(ii)Local object boundary tracking: This will optimally fine-tune the contour of the desired object region.
394 |
Xu et al. |
(iii)Flexible identification mechanism: This will bridge parts (i) and (ii) systematically and also be extendable to allow additional control functions or prior knowledge.
Our global-to-local processing logic is similar to the design concept of multiscale image segmentation algorithms [60]; however, subsequent processing is radically different. The multiple-scale based techniques use various processing methods applied to assorted resolutions of original images, normally from rough to fine. In the proposed framework, different models are employed to describe original image in different processing stages, from region based to pixel based and from global to local. Therefore, it is a hybrid solution by integrating the advantages of more than one algorithm.
In section 8.2 QHCF is employed as a deterministic implementation of MRFbased image segmentation. In this section, we use MRF as the basic model for the global region partition. To further track and enhance an object’s boundary, we adopt the enhanced version of the active contour model (ACM) and minimum path approach (MPA) as the basic tracking method. A new scheme will be introduced to find ACM initial points based on the MRF region segmentation results so that it can automatically provide a reliable initialization. More specifically, unlike looking for those points in a potential field in previous solutions, we pick up the most reliable contour pixels from boundary points found by the QHCF and use the two-end-point based MPA to find the curves between every two adjacent ones. Then the whole boundary of object can be found by linking all these curve sections.
8.3.2 Survey of Active Contour Model
The active contour model, also known as Snake, was first introduced by Kass et al. [61] in 1988. In computer vision and image/video processing, it has been used as a very effective approach to implement contour tracking and shape feature extraction of interested object, and is also regarded as a successful deformable model in applications ranging from medical image analysis to video object manipulation. Basically, the development of active contour models has the following phases: classical Snake, geometric models, and minimal path approach models.
Roughly speaking, a Snake model can be regarded as a curve measured with an energy function. To track the contour of a desired object in an image, some
Segmentation Issues in Carotid Artery Atherosclerotic Plaque |
395 |
points or curves must be specified near the object’s boundary initially. When the algorithm is applied, the Snake will “move” gradually toward the positions where the object’s contour locates under certain constraints. This deformation process is generally conducted by iteratively searching for a local minimum of an energy function. However, a well-known problem of the classical Snake model is that it may be trapped into local minimal solutions caused by noise or poor initialization [62].
Another kind of active model is called the geometric active contour model that was first proposed by Caselles in 1993 [63]. It uses a geometric approach for the Snake modeling and applies the level set theory in the optimal curve searching. During the deformation process, the object contour evolutes and expands in the normal direction under certain constraints. Heuristic procedures are used to stop the evolution process when an edge is reached. The experiments presented in [63, 64] demonstrate better results than that was done with the classical Snake model [65, 66]. In 1995, Ceselles further improved the geometric model and transformed the object boundary detection problem as a path searching for minimal weighted length. This enhanced version is also known as the “geodesic model,” which experimentally outperforms both the classical Snake model and the geometric model [67].
The minimum path approach, proposed by Cohen and Kimmel in 1996, is a state of the art solution in active contour modeling. It uses a path of cost as the interpretation of the Snake curve. The main feature of this method is that, given two prespecified end points, the global minimal path can be obtained. The energy optimization process is based on a numerical method proposed by Sethian [23] to find the “shortest path” in term of the global minimum of the energy among all paths joining the two end points. Compared with its previous versions of active contour modeling, MPA has the following advantages:
(i)It overcomes the local minimum problem in energy minimizing process.
(ii)It simplifies the initialization: only two initial end points are needed.
Nevertheless, this model still has some limitations in practical application. For example, the initial points must be precisely on the boundary of desired object to ensure the best contour searching performance. Therefore, human interaction is often required to accurately locate the initial points. Also, this model cannot address problems in which the shape of the desired object has topology change.
396 |
Xu et al. |
In the rest of this section, we will have a review of classical Snake model and the minimal path approach since they present the instinct spirit of this model and the state of the art of the optimal algorithm design.
8.3.2.1 Classical Snake Model
In the classical Snake model, a deformable curve is represented by an energy function whose local minima should be able to provide a set of alternative solutions based on the features of the object under investigation, such as shape, size, location, etc., as well as the surrounding image context. The optimization process is guided by energy minimization, which leads the deformable curve to evolve gradually from the initial contour toward the desired boundary of the closest object. The representation of the energy function contains two parts: internal energy Eint and external energy Eext.
Generally, the internal energy Eint imposes only the smoothness constraint on the curve, such as elasticity and bending behavior, while the external energy
Eext is responsible for pulling the Snake curve toward the object’s boundary. All these energies are formulated within an energy expression that is minimized by deforming the contour in an optimization process. The definitions are given as
N
ESnake = [Eint(i) + Eext(i)], |
(8.31) |
i=1 |
|
Eint(i) = αi vi − vi−1 2 + βi vi−1 − 2vi + vi+1 2, |
(8.32) |
where N is the total number of Snake points; vi = (xi, yi) is a coordinate of the ith Snake point. Parameter αi is a constant imposing the tension constraint between two adjacent Snake points. The stronger the αi is, the shorter contour of the object will be obtained. Parameter βi is a constraint tuning the bending among every three consecutive Snake points. Generally, the higher value of βi will lead a smoother searched contour. In different applications where the object size and desired curvatures may vary, the values of αi and βi need to be adjusted. Obviously, it is unavoidable to have a procedure for parameters fine-tuning in practical applications. The definition of Eext(i) is usually applicationor feature-dependent. For example, Eext(i) is often expressed as a form of image gradient function when boundary points of object are under searching.
Segmentation Issues in Carotid Artery Atherosclerotic Plaque |
397 |
The optimization process is implemented by iteratively finding a local minimum of the energy function given in Eq. (8.31).
Even thought the classical Snake model proposed has shown very good performance of object contour tracking in some applications, it has the following aspects that need to be further improved:
(i)Optimization of the deformable curve: Since the energy minimizing method in the original Snake formulation stops at a local minimum, it is obvious that numerical instabilities may be generated. Aminiet al.
[68] proposed to apply the dynamic programming approach to overcome this problem. Unfortunately, global minima cannot be guaranteed in his implementation [69]. In recent publications, Chandran and Potty [70] developed a method by imposing stronger conditions to force the optimizing process to avoid local minima. However, since these additional constraints have to be redesigned in each individual application, it is hard to be used as a general solution.
(ii)Initialization of Snake model: To track the contour of the desired object, some initial points or a closed curve are generally placed near the object’s boundary in advance. This usually needs human’s interactive mechanism, like Snake pit [71], involved to provide a reliable initialization. Otherwise, either a wrong target boundary may be tracked or the algorithm evolves with poor convergence [23]. To reduce this model’s sensitivity and simplify its tedious initialization process, some methods have been proposed, such as “Snake growing” method by Berger et al. [72] and Fuzzy logic based framework by Eugene [73]. Cohen also introduced another method, called balloon force, to push the Snake curve outward from the center [74], which shows greater stability and faster convergence [75], by using the finite-element method. However, the limitations of this method is also very obvious, such as the location of initial points must be inside the desired object. Also, the optimal design of the balloon force is not closed.
In summary, even though some solutions have been proposed to resolve the drawbacks of classical Snake model, the main problems such, as initialization, topology changes, and energy minimization, have not been satisfactorily resolved.
Segmentation Issues in Carotid Artery Atherosclerotic Plaque |
399 |
Another drawback with MPA is that this approach lacks the topography handling ability. For some applications within our study, such as carotid artery lumen contour tracking in MRI sequences, the topology of blood vessel lumen in each cross-section images may change due to bifurcation, and it is impossible to apply MPA directly even though the initial points can be provided precisely. Therefore, a mechanism is needed to track the topology changes for automatic image processing.
8.3.3 MRF-Based Active Contour Model
The discussions in section 8.3.1 and 8.3.2 have shown that both MRF-based region segmentation and active contour model-based object contour tracking algorithms have unavoidable problems when applied in real applications such as automatic blood vessel lumen segmentation in MR sequence. In this section, we present a new framework for image segmentation, which integrates the advantages of MRF and active contour models and overcomes some of problems from each of them. Also, this framework is sufficiently flexible for additional prior knowledge to be plugged in so as to be adapted to various applications.
Note that the closed contour of the desired object is found by linking the sections of curves between each pair of adjacent initial points. These points are usually static in the optimization process and are very critical to the overall contour shape in the final result. To guarantee the accuracy of these initial points, human interaction is usually involved in MPA model based applications [73, 76, 77]. In the proposed framework, a new scheme is designed to automatically find these initial points, which will be called “control points” in the following context as a distinction of those defined in previous active contour models. The control points are identified from the boundary points of the desired object in the MRF based region segmentation result under maximum reliability criterion.
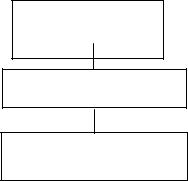
The basic structure of the framework is shown in Fig. 8.7. In step one, the QHCF procedure is applied to each of the input image to obtain a reliable regionbased segmentation of the whole image. Then an object identification procedure is conducted. This is the step where prior knowledge of the desired object can be applied, and approaches such as the decision tree, fuzzy logic reasoning, neural networks, morphological operations, and so on can be employed in the design.
400 |
Xu et al. |
MRF based segmentation
-- Image partition
Object identifying and control points estimation
Minimal Path Approach
-- contour fine tune
Figure 8.7: Structure of MRF-based Snake model.
Once the object of interest is identified, a procedure of optimal control point estimation operates among each section of its boundary points. Initialized by those control points, an instance of MPA model is setup and the optimal contour of the desired object is obtained.
8.3.3.1 Control Points Estimation
In the segmentation result obtained by the QHCF algorithm, the following information is available for further processing: region distribution, region intensity related properties (such as mean and standard deviation), and region boundaries. Although an MRF model can take into account the intensity continuity among neighboring pixels during the segmentation process, it imposes no constraint along the contour direction. Therefore, this problem of the QHCF method that there is no curve continuity constraint of object’s contour during the optimization process makes the segmented object contour to be easily distorted due to noise. The experiment results in Fig. 8.5 have shown this drawback (rugged object boundary) that is unacceptable in some practical applications, such as quantitative medical image analysis and measurement.
In the proposed framework, a further fine-tune of region’s boundary is accomplished by employing the MPA contour model [23]. To have an accurate initialization, it first needs to find the control points automatically.
As mentioned previously, the labeling process of each pixel in an MRF model is decided by the MAP, max{p(xi | y), i = 1, 2, . . . , N, where N is the number of labels}. Based on this segmentation, the contour of an object can be easily found by searching region’s boundary points. However, the experimental analysis of the