

Глава 5. Законы сохранения в механике
5.1 Закон сохранения импульса……………………………………………….........61
5.2 Закон сохранения момента импульса…………………………………….........63
5.3 Закон сохранения энергии……………………………………………………...65
5.4 Применение законов сохранения к упругому и неупругому
соударению двух тел……………………………………………………….…...65
5.4.1 Упругий удар……………………………………………………………....66
5.4.2 Неупругий удар…………………………………………………………....68
Глава 6. Механические волны
6.1 Продольные и поперечные волны……………………………………………...69
6.2 Уравнение плоской гармонической волны. Волновое уравнение…………...70
Глава 7. Молекулярное движение
7.1 Размеры и масса молекул…………………………………………………….....73
7.2. Движение и столкновение молекул газа……………………………………....74
7.3 Давление и температура……………………………………………………...…75
7.4 Скорость и энергия молекул [распределение Максвелла]…………………....76
7.5 Диффузия, внутреннее трение, теплопроводность…………………………....77
7.6 Давление идеального газа на стенку………………………………………...…80
7.7 Уравнение состояния идеального газа……………………………………...….81 .
Глава 8. Основы термодинамики
8.1. Термодинамическая система. Внутренняя энергия идеального газа………..82
8.2. Работа и теплопередача………………………………………………………...83
8.3. Первое начало термодинамики, термодинамические изопроцессы……...…84
8.4 Теплоемкость………………………………………………………………...….89
8.5 Обратимые и необратимые процессы. Термодинамическая
вероятность…………………………………………………………………..…..92
8.6 Изменение энтропии в изопроцессах……………………………………...…...95
8.7 Тепловая машина. Цикл Карно....……………………………………….........101
Основные понятия в механике…………………………………………………....105
Основные законы………………………………………………………………..…111
Обозначения……………………………………………………………………..…113
Глава 1. Кинематика материальной точки
Лекция 1
Механика – это раздел физики изучающий механическое движение как процесс изменения взаимного расположения тел или их частей в пространстве с течением времени.
Механика при ее изучении разделяется на две части: кинематика и динамика.
Кинематика изучает механическое движение без учета причин, а динамика с учетом сил действующих на тело.
В кинематике тело рассматривается как материальная точка (м.т.), которая является моделью макроскопического тела, размерами которого можно пренебречь в условиях данной задачи.
1.1 Понятия и определения
1.1.1. Система отсчета
Движение материальной точки (м.т.) всегда рассматривается относительно какого-либо другого тела, которое принимается за неподвижное.
Тело, которое считается неподвижным и по отношению к которому определяется положение других тел, называется, телом отсчета.
Положение м.т. в пространстве определяется с помощью системы координат X,Y,Z, связанной с телом отсчета.
Совокупность тела отсчета, жестко связанной с ним системы координат и часов, образует систему отсчета.
П оложение
материальной точки в декартовой системе
координат определяется через ее
координаты x, y, z или радиус-вектор
оложение
материальной точки в декартовой системе
координат определяется через ее
координаты x, y, z или радиус-вектор
![]() ,
проведенный в заданную точку из начала
координат (рис 1.1). Радиус-вектор
,
проведенный в заданную точку из начала
координат (рис 1.1). Радиус-вектор
![]() и
его проекции на оси координат определяется
из соотношений:
и
его проекции на оси координат определяется
из соотношений:
![]()
![]() ,
,
![]() (1.1)
(1.1)
где
![]() – единичные векторы осей координат.
– единичные векторы осей координат.
Модуль вектора
![]()
![]() .
(1.2)
.
(1.2)
1.1.2. Траектория, путь, перемещение
При движении м.т. относительно выбранной системы отсчета ее радиус-вектор и его координаты зависят от времени.
 (1.3)
(1.3)
Совокупность всех последовательных положений материальной точки в пространстве определяет траекторию ее движения. Уравнение траектории z=z (x,y) находится в результате решения системы уравнений (1.3) путем исключения параметра t.
Движение называется прямолинейным, если его траектория – прямая линия, и криволинейным во всех других случаях. Вид траектории не зависит от выбора системы отсчета, а ее кривизна
![]()

г
τ2
τ2
![]() угол между касательными
угол между касательными
![]() и
и
![]() ,
проведенными в точках 1 и 2 (рис. 1.2),
,
проведенными в точках 1 и 2 (рис. 1.2),
![]() - длина участка траектории. Величина,
обратная кривизне С, называетсярадиусом
кривизны
- длина участка траектории. Величина,
обратная кривизне С, называетсярадиусом
кривизны
![]()
![]() .
.
П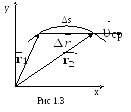 ри
движении м.т. по произвольной криволинейной
траектории в выбранной системе отсчета,
за интервал времени
ри
движении м.т. по произвольной криволинейной
траектории в выбранной системе отсчета,
за интервал времени
![]() радиус-вектор изменяется на
радиус-вектор изменяется на
![]() .
Вектор
.
Вектор![]() называется
вектором
перемещения
(рис 1.3).
называется
вектором
перемещения
(рис 1.3).
За интервал времени
![]() м.т. проходит участок траектории
м.т. проходит участок траектории
![]() .
Длина этого участка обозначается черезs
и называется путь.
Путь
может быть
больше модуля вектора перемещения или
равен ему.
Равенство наблюдается только в частных
случаях – при прямолинейном движении
тела в одном направлении, и для бесконечно
малых промежутков времени
.
Длина этого участка обозначается черезs
и называется путь.
Путь
может быть
больше модуля вектора перемещения или
равен ему.
Равенство наблюдается только в частных
случаях – при прямолинейном движении
тела в одном направлении, и для бесконечно
малых промежутков времени
![]() .
.
1.1.3. Скорость
Скорость — это векторная величина, характеризующая быстроту изменения положения м.т. в пространстве.
Для характеристики движения м.т. вводят понятие средней и мгновенной скорости.
С

![]() к промежутку времени
к промежутку времени![]() ,
в течение которого произошло перемещение
м.т.
,
в течение которого произошло перемещение
м.т.

Направление
![]() ,
совпадает с направлением вектора
перемещения
,
совпадает с направлением вектора
перемещения
![]() ,
(
,
(![]() )
(рис 1.3)
)
(рис 1.3)
Мгновенной
скоростью называется
предельное значение вектора средней
скорости при стремлении
![]() к нулю
к нулю
![]() (1.4)
(1.4)
В ектор
перемещения
ектор
перемещения
![]() направлен по секущей и при стремлении
направлен по секущей и при стремлении
![]() к нулю
стремится к касательной в точке 1 (рис.
1.4).
к нулю
стремится к касательной в точке 1 (рис.
1.4).
Следовательно,
вектор мгновенной скорости
![]() направлен по касательной в заданной
точке траектории в сторону движения
м.т.
направлен по касательной в заданной
точке траектории в сторону движения
м.т.
Модуль мгновенной скорости определяется из соотношения
![]() ,
(1.5)
,
(1.5)
Путь, пройденный материальной точкой за интервал времени от t1 до t2
 ,
(1.6)
,
(1.6)
где
![]() ,
называется путевой скоростью.
,
называется путевой скоростью.
С учетом соотношений (1.1)
 (1.7)
(1.7)
где
![]() – проекции
скорости точки на оси координат.
– проекции
скорости точки на оси координат.
Модуль вектора скорости в декартовой системе координат
![]() .
(1.8)
.
(1.8)
1.1.4. Ускорение
В процессе движения направление и модуль вектора скорости м.т. могут изменяться. Изменение вектора скорости определяется ускорением.
У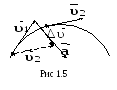 скорение
материальной точки — векторная величина,
характеризующая быстроту изменения
вектора скорости с течением времени.
скорение
материальной точки — векторная величина,
характеризующая быстроту изменения
вектора скорости с течением времени.
П
 о
аналогии со средней и мгновенной
скоростью вводят понятие среднего и
мгновенного ускорения. Пусть в момент
времени t1
м.т. имеет скорость
о
аналогии со средней и мгновенной
скоростью вводят понятие среднего и
мгновенного ускорения. Пусть в момент
времени t1
м.т. имеет скорость
![]() ,
а в момент t2
– скорость
,
а в момент t2
– скорость
![]() (рис.
1.5) . Тогда за промежуток времени
(рис.
1.5) . Тогда за промежуток времени
![]() вектор скорости изменится на величину
вектор скорости изменится на величину
![]() ,а среднее
ускорение
,а среднее
ускорение

![]() .
(1.9)
.
(1.9)
В ектор
ектор
![]() ,
совпадает с вектором
,
совпадает с вектором
![]() .
.
Мгновенное ускорение
![]() (1.10)
(1.10)
где
![]()
С учетом соотношений (1.1) и (1.7)
![]()
![]() ,
(1.11)
,
(1.11)
где  –проекции ускорения
точки на оси координат.
–проекции ускорения
точки на оси координат.