

1.2. Виды движения
1.2.1. Равномерное, прямолинейное
Движение называется
равномерным и прямолинейным, если точка
движется по прямой линии с постоянной
скоростью
![]() .
.
Рассмотрим
движение материальной точки с
постоянной скоростью вдоль оси OX
(рис. 1.8). Пусть в начальный момент времени
t=0
координата точки х = х0,
а скорость
![]() совпадает с направлением движения.
совпадает с направлением движения.
Н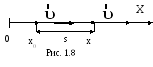 айдем
координату х и путьs,
пройденный точкой за интервал времени
t.
айдем
координату х и путьs,
пройденный точкой за интервал времени
t.
За малый интервал dt перемещение точки
![]() ,
,
где
![]() – проекция вектора скорости
– проекция вектора скорости![]() на ось ОХ.
на ось ОХ.
Проинтегрируем левую и правую часть последнего равенства в пределах изменения переменных x и t
![]() ,
,
![]() ,
(1.19)
,
(1.19)
![]() .
.
В случае когда
вектор скорости
![]() не
совпадает с
направлением движения
не
совпадает с
направлением движения
![]() .
.
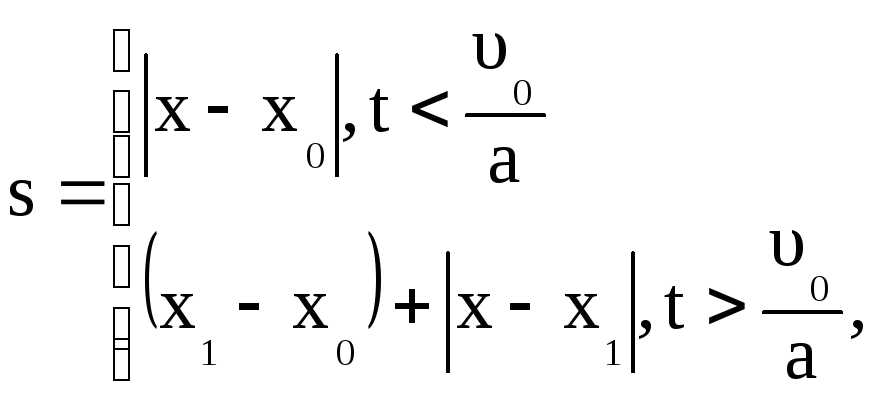
При прямолинейном равномерном движении пройденный точкой путь
![]() .
(1.20)
.
(1.20)
1.2.2 Равнопеременное прямолинейное
Движение
называется равнопеременным и прямолинейным,
если тело перемещается по прямой линии
с постоянным ускорением
![]() .
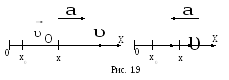
Равнопеременное прямолинейное движение
может быть равноускоренным, когда вектор
ускорения совпадает с вектором мгновенной
скорости и равнозамедленным, когда ему
противоположен (рис. 1.9).
.
Равнопеременное прямолинейное движение
может быть равноускоренным, когда вектор
ускорения совпадает с вектором мгновенной
скорости и равнозамедленным, когда ему
противоположен (рис. 1.9).
Пусть в начальный
момент времени координата точки x=х0,
скорость
![]() совпадает с направлением оси ОХ, тогда
совпадает с направлением оси ОХ, тогда
при равноускоренном
движении
![]() ,
,![]() равнозамедленном
равнозамедленном
![]()
![]() .
.
За время t пройденный точкой путь.
![]() ,
(1.21)
,
(1.21)
где
![]() – модуль проекции вектора скорости на
ось OX находится из соотношения
– модуль проекции вектора скорости на
ось OX находится из соотношения
![]() интегрированием
его левой и правой части в пределах
изменения переменных
интегрированием
его левой и правой части в пределах
изменения переменных
![]() и t
и t
![]()
![]()
При подстановки
в соотношение (1.19) скорости
![]() для равноускоренного движения пройденный
путь
для равноускоренного движения пройденный
путь
![]() ,
,
координата точки
![]() .
(1.22)
.
(1.22)
Для равнозамедленного движения проекция скорости и координата точки определяются по формулам
![]() .
.
![]() .
(1.23)
.
(1.23)
Путь пройденной точкой
где
![]() .
.
1.2.3 Равнопеременное
Движение называется равнопеременным, если тело перемещается по траектории с постоянным вектором ускорения.
Примером
равнопеременного криволинейного
движения является движение тела
брошенного со скоростью
![]() под
углом
под
углом
![]() к горизонту (рис. 1.10) Движение тела
происходит в гравитационном поле Земли
с постоянным ускорением свободного
падения
к горизонту (рис. 1.10) Движение тела
происходит в гравитационном поле Земли
с постоянным ускорением свободного
падения![]() .
Для определения положения тела в
пространстве разложим его движение на
равномерное прямолинейное по оси OX со
скоростью
.
Для определения положения тела в
пространстве разложим его движение на
равномерное прямолинейное по оси OX со
скоростью
![]() и равнопеременное
по оси OY с ускорением свободного
падения g и начальной скоростью
и равнопеременное
по оси OY с ускорением свободного
падения g и начальной скоростью
![]() .
.
В момент времени t координаты тела
момент времени t координаты тела
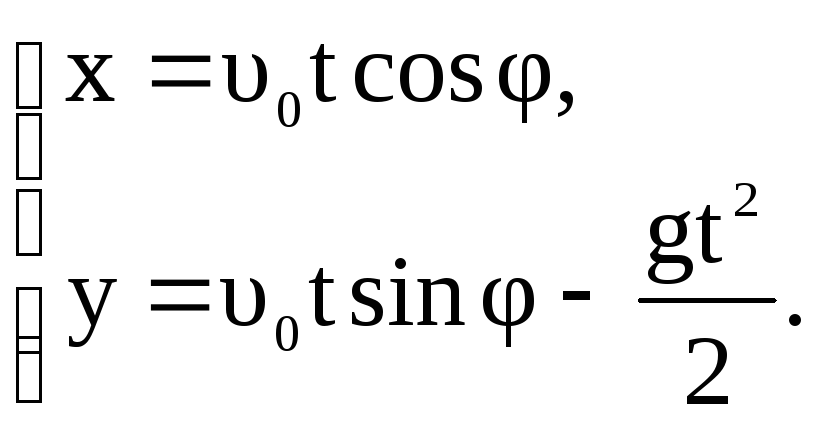 (1.25)
(1.25)
вектор скорости
![]() .
(1.26)
.
(1.26)
Модуль вектора скорости
![]() ,
(1.27)
,
(1.27)
где
![]() .
.
Уравнение траектории найдём путем исключения параметра t из равенств (1.25)
![]() .
(1.28)
.
(1.28)
Ускорение свободного падения в любой точке траектории можно разложить на его касательную и нормальную составляющие, где модуль касательного ускорения
 ,
(1.29)
,
(1.29)
где α-угол между
векторами скорости
![]() и ускоренияg
в заданной точке траектории
и ускоренияg
в заданной точке траектории
Модуль нормального ускорения
![]() .
(1.30)
.
(1.30)
Из сравнения
уравнения параболы
![]() и равенства (1.28) следует, что тело,
брошенное под углом к горизонту, движется
по параболе.
и равенства (1.28) следует, что тело,
брошенное под углом к горизонту, движется
по параболе.
Задания для самоконтроля знаний.
Определить путь пройденный автомобилем за 2 часа его движения со скоростью 90 км/ч.
Определить время обгона легковым автомобилем грузовика, если водитель совершает этот маневр при начальной скорости 80 км/ч с ускорением 2 м/с2.
Определить тормозной путь поезда движущегося со скоростью 36 км/ч при времени торможения 1 минуты.
Определить максимальную высоту подъема снаряда имеющего начальную скорость 100м/с и выкатившего из орудия под углом 45° к горизонту.
Л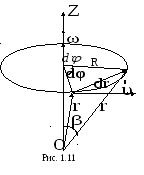 екция
3
екция
3
1.2.4 Равномерное, вращательное
Рассмотрим движение
м.т. по окружности радиусом R
с постоянной линейной скоростью
![]() вокруг неподвижной осиZ
(рис. 1.11).
вокруг неподвижной осиZ
(рис. 1.11).
![]() Положение
точки определяет радиус-вектор
Положение
точки определяет радиус-вектор
![]() .За малый
интервал времени
.За малый
интервал времени
![]() радиус-вектор повернется на угол
радиус-вектор повернется на угол![]() .
Направление поворота м.т. вокруг осиZ
задается
вектором
.
Направление поворота м.т. вокруг осиZ
задается
вектором
![]() и правилом
правого
винта: поступательное движение правого
винта и вектора
и правилом
правого
винта: поступательное движение правого
винта и вектора
![]() совпадают,
если вращение точки и винта совершается
в одинаковом направлении.
Модуль
вектора
совпадают,
если вращение точки и винта совершается
в одинаковом направлении.
Модуль
вектора
![]() равен углу поворота за интервал времени
равен углу поворота за интервал времени![]() .
Линейное перемещение вектора
.
Линейное перемещение вектора![]() за времяdt
за времяdt
![]() (1.31)
(1.31)
![]()
где
![]() – угол между вектором
– угол между вектором![]() и вектором
и вектором![]() .
.
Вектор линейной скорости движения точки
![]() ,
(1.32)
,
(1.32)
где
![]() – вектор угловой скорости.
– вектор угловой скорости.
Вектор угловой
скорости
![]() совпадает с направлением вектора
совпадает с направлением вектора![]() )
)![]() .
.
Модуль вектора линейной скорости
![]() .
(1.33)
.
(1.33)
Вектор линейного ускорения
![]()
![]() ,
(1.34)
,
(1.34)
где
![]() – вектор углового ускорения,
– вектор углового ускорения,
![]() – вектор касательного ускорения,
– вектор касательного ускорения,
![]() – вектор нормального ускорения.
– вектор нормального ускорения.
Направление вектора
углового ускорения
![]() совпадает с направлением вектора
совпадает с направлением вектора![]() (
(![]() ),
если угловая скорость возрастает, и
противоположно (
),
если угловая скорость возрастает, и
противоположно (![]() )
, если она уменьшается.
)
, если она уменьшается.
Модули векторов
![]() ,
,
![]() .
.
![]() .
(1.35)
.
(1.35)
Угловой путь м.т., движущейся по окружности за время dt
![]() .
.
Угловой путь
![]() точки
за интервал времениt
при начальном угле
точки
за интервал времениt
при начальном угле
![]()
![]() .
.