

11 Лекция 11. Постановка задачи идентификации
Содержание лекции:
- постановка задачи идентификации; функционал невязки.
Цель лекции:
- познакомиться с постановкой задачи идентификации; изучить метод минимизации функционала невязки.
11.1 Объект идентификации
 В
любой реальной системе на
выходные переменные действуют
в той или иной степени много различных
факторов. Эти факторы могут иметь природу
помех (шума), а могут быть параметрами,
о которых мы не имеем представления.
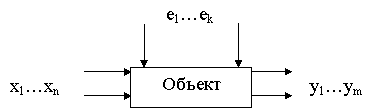
Объект идентификации будем представлять
в следующем виде (см. рисунок 11.1).
В
любой реальной системе на
выходные переменные действуют
в той или иной степени много различных
факторов. Эти факторы могут иметь природу
помех (шума), а могут быть параметрами,
о которых мы не имеем представления.
Объект идентификации будем представлять
в следующем виде (см. рисунок 11.1).
Рисунок 11.1 - Объект идентификации
где Х = (x1…хn) – наблюдаемые входы объекта; Е = (e1…ek) – его ненаблюдаемые входы; У = (y1…ym) – наблюдаемые выходы объекта.
Входные и выходные сигналы объекта являются источниками информации при идентификации динамических объектов. Данные о помехе Е, как правило, отсутствуют. Все входы объекта представляют собой воздействия внешней среды на объект и являются какими-то определенными функциями состояния среды и времени. Входы объекта часто являются случайными функциями времени, статистические свойства которых в общем случае неизвестны, однако известны наблюдения входа и выхода объекта, то есть реализации функций Х(t) и Y(t) в непрерывной или дискретной форме.
Идентификация затрудняется наличием шумов, которыми могут быть чистые помехи, неизмеряемые сигналы, коррелированные с измеряемыми, ошибки измерения и преобразования и т.д. Относительно ненаблюдаемого входа E(t) предполагается известной его структура, то есть характер этой случайной функции. Обычно ограничиваются случаем, когда E(t) является нормальным случайным процессом, непосредственное наблюдение которого невозможно. Без потери общности можно все эти шумы привести к выходу и представить одной векторной величиной (см. рисунок 11.2).
Все сведения об объекте, которые необходимо иметь для того, чтобы начать процедуру идентификации, подразделяются на два вида: априорные и апостериорные.

Рисунок 11.2 - Классическое представление динамической системы
Априорная информация, которой необходимо располагать еще до наблюдения входов и выходов объекта, определяет структуру идентифицируемого объекта. Например, можно выделить четыре признака (хотя структура не исчерпывается ими): динамичность, стохастичность, нелинейность, дискретность. Естественно, представления о виде модели могут измениться после анализа апостериорной информации, то есть после наблюдения за поведением входа и выхода объекта.
Апостериорная информация имеет количественный характер, то есть это результат (протокол) наблюдений входа и выхода объекта. Для непрерывных объектов имеем записи непрерывных функций: X(t) – результаты всех измерений входов объекта и Y(t) – результаты измерений его выходов за тот же период наблюдений (интервал 0<=t<=T). Протокол записывается в виде: (<X(t), Y(t)>, 0<=t<=T). Это означает, что поведение объекта зарегистрировано в виде n+m различных кривых: x1(t),…, xn(t); y1(t),…, ym(t) в этом интервале.
В дискретном случае имеем X = (X1,…, XN), Y = (Y1, …, YN) и протокол записывается в виде (<Xi Yj>, i=1,…, N; j = 1,…,N), где Xi= (x1i,…,xni), Yi = (y1i ,…, ymi). Этот протокол представляет собой таблицу из n+m столбцов и N строк
|
x11 |
x21 |
… |
xn1 |
y11 |
y21 |
… |
ym1 |
|
x12 |
x22 |
… |
xn2 |
y12 |
y22 |
… |
ym2 |
|
|
|
|
|
|
|
|
|
|
x1N |
x2N |
… |
xnN |
y1N |
y2N |
… |
ymN |