

Основы_акустики_Гринченко_Вовк
.pdf
|
+ |
3 |
|
2 |
− |
1 |
(P (R )− P0 ) = 0. |
(11.90) |
RR |
2 |
R |
|
ρ |
||||
|
|
|
|
|
|
|
Чтобы определить давление в жидкости на поверхности пузырька P (R), используем граничное условие равенства давлений снаружи и внутри на поверхности пузырька. Давление снаружи равно сумме давления жидкости P (R) и давления, обусловленного силами поверх- ностного натяжения, 2σ/R (σ — коэффициент поверхностного натя- жения), т.е. P (R) + 2σ/R. Давление внутри равно давлению газа в пу- зырьке Pr (R). Полагая процессы, происходящие в газе, адиабатиче- скими (см. (4.19)), можно для Pr (R) записать следующее выражение:
|
|
|
|
|
|
|
|
|
2σ |
R |
0 |
|
3γ |
|
|
|||||||
|
|
Pr |
(R ) = P0 + |
|
|
|
|
|
|
|
|
|
|
|
, |
|
(11.91) |
|||||
|
|
|
|
|
R |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
R0 |
|
|
|
|
|
|
|
|||||||
где γ — показатель адиабаты; R0 — стационарное значение радиуса |
||||||||||||||||||||||
пузырька, когда P (R ) |
|
R =R0 |
= P0 . Приравняв Pr (R ) |
и давление снару- |
||||||||||||||||||
|
||||||||||||||||||||||
|
|
|||||||||||||||||||||
жи P (R ) + 2σ R , получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
2σ |
R |
0 |
|
3γ |
|
|
2σ |
|
|
||||||
P (R ) = P0 |
+ |
|
|
|
|
|
|
|
|
|
|
− |
R |
. |
(11.92) |
|||||||
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
R0 |
R |
|
|
|
|
|
|
|
|
||||||
Если рассматривать |
малые |
|
колебания, |
|
когда |
|R – R0| << R0, то |
||||||||||||||||
уравнение (11.90) с учетом (11.92) можно привести к уравнению ли- нейного осциллятора. Для этого обозначим R – R0 = ξ и, подставив R = =R0 + ξ в (11.90) и (11.92), получим такое уравнение:
|
3 2 |
|
1 |
|
|
2σ |
|
|
1 |
|
3γ |
|
2σ |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||||||||
(ξ + R0 )ξ + |
|
ξ |
− |
|
P0 |
+ |
|
|
|
|
|
|
|
− |
|
|
− P0 |
|
= 0 |
2 |
ρ |
|
1 |
+ ξ/R0 |
|
R0 |
+ ξ |
|
|||||||||||
|
|
|
|
|
R0 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Далее, раскладывая степенную функцию в ряд Тейлора и отбрасывая
члены, содержащие |
квадратичные |
|
|
|
величины ξ |
2 |
|
2 |
(ведь |
||||||||||
|
|
|
и |
ξ |
|
||||||||||||||
(ξ/R0 ) 1), получим уравнение гармонического осциллятора: |
|
|
|||||||||||||||||
|
|
3γ |
|
|
3γ −1 |
|
|
2σ |
|
|
|
|
|
|
|||||
ξ |
+ |
|
|
P + |
|
|
|
|
|
|
ξ = 0. |
|
|
|
(11.93) |
||||
ρR02 |
|
|
|
|
|
|
|
||||||||||||
|
|
0 |
|
|
3γ |
|
|
|
R0 |
|
|
|
|
|
|
||||
Отсюда определяем частоту малых колебаний ω0 пузырька: |
|
|
|
||||||||||||||||
|
|
|
1 |
|
3γ |
|
|
3γ −1 |
2σ |
|
|
|
|
|
|||||
ω |
= |
|
P + |
. |
|
|
|
(11.94) |
|||||||||||
R0 ρ |
|
|
|
|
|||||||||||||||
|
0 |
|
|
0 |
|
|
3γ |
R0 |
|
|
|
|
|||||||
Как и ожидалось, величина ω0 тем больше, чем меньше стационар- ный радиус пузырька R0.
731

Уравнение (11.90) с учетом (11.92) и (11.94) удобно переписать в безразмерном виде, для чего введем безразмерные переменные R = R R0 и τ = ω0t . После простых преобразований получим
R0 и τ = ω0t . После простых преобразований получим
2 |
|
|
|
|
2 |
|
1 |
1+ χ χ |
|
|
|
|||
d R 3 |
|
dR |
|
|
|
|
||||||||
R |
2 |
+ 2 |
|
dτ |
|
− |
|
|
3γ |
− |
|
−1 |
= 0, |
(11.95) |
3γ + (3γ −1)χ |
R |
|||||||||||||
dτ |
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
где χ = 2σ (R0P0 ).
(R0P0 ).
Рис. 11.9. Фазовый портрет колебаний пузырька в жидкости (справа) и временные зависимости радиуса пузырька R(t /T0 ) (слева) при разных ам- плитудах колебаний A ≡ Rmax  R0 :
R0 :
а — 1,1; б — 1,5; в — 2;
R0 = 10 мкм, P0 = 100 кПа, σ = 0,0725 Н/м, χ = 0,145, для воздуха γ = 1,4
На рис. 11.9 (слева) приведены временные зависимости радиуса пузырька (вдоль оси абсцисс отложено нормированное время t T0 ,
T0 ,
T0 = 2π ω0 ), а на рис. 11.9 (справа) — фазовые траектории осциллято-
ω0 ), а на рис. 11.9 (справа) — фазовые траектории осциллято-
ра (11.95) на плоскости с координатами ( R , dR dτ). Параметром кри- вых является амплитуда колебаний, которая определяется начальны-
dτ). Параметром кри- вых является амплитуда колебаний, которая определяется начальны-
732
ми условиями R(0) = A ≡ Rmax  R0 , dR(0)
R0 , dR(0) dτ = 0 . Как видим, в случае колебаний с относительно малой амплитудой (рис. 11.9, а), колебания близки к гармоническим. При этом фазовая кривая близка к эллип- тической кривой (рис. 11.9, а). С ростом амплитуды (рис. 11.9, б, в) колебания становятся негармоническими, что имеет свое отражение на фазовой плоскости. При этом период колебаний с увеличением амплитуды возрастает.
dτ = 0 . Как видим, в случае колебаний с относительно малой амплитудой (рис. 11.9, а), колебания близки к гармоническим. При этом фазовая кривая близка к эллип- тической кривой (рис. 11.9, а). С ростом амплитуды (рис. 11.9, б, в) колебания становятся негармоническими, что имеет свое отражение на фазовой плоскости. При этом период колебаний с увеличением амплитуды возрастает.
11.10. Автоколебания
11.10.1. Автоколебания — типичное природное явление
“Ни один инженер не смог бы создать что-либо подобное сердцу — изумительной и удивительной вибрационной машине. … Непрерывно действуя в течении всей жизни человека, сердце под- держивает себя, по крайней мере частично, результатами своего же собственного действия. Но, строго говоря, оно не остается из года в год неизменным, так как процесс поддержания сердечной деятельно- сти неизбежно и постепенно меняет само это колебательное устройст- во” [5, с. 154]. Грустно звучат последние строки. Однако такова жизнь человека и, понимая уникальность нашего организма, мы должны заботиться о сердце, которое представляет собой удивитель- ную автоколебательную систему.
Автоколебания — это особые колебания системы. Они не имеют ничего общего с вынужденными колебаниями, когда система нахо- дится под действием внешней силы. Они отличаются от собственных колебаний системы, как механизмом возникновения, так и механиз- мом сохранения амплитуды. Как известно, собственные колебания системы представляют собой колебания вблизи положения устойчи- вого равновесия. Амплитуда этих колебаний определяется начальным смещением и начальной скоростью. Вследствие наличия демпфиро- вания, присущего любой реальной системе, собственные колебания являются затухающими.
Возникает вопрос: могут ли возникать в системе незатухающие колебания без влияния внешней колебательной силы. Оказывается, что могут. В этом случае для поддержки колебаний система должна быть связанной с любым (вообще не колебательным) источником энергии, за счет которого она могла бы пополнять затраты энергии вследствие действия сил демпфирования. Чтобы колебания были не- затухающими (стационарными), система за период колебаний долж- на взять у источника столько же энергии, сколько затрачивает за
733

данный промежуток времени. Для этого система должна сама руко- водить поступлением энергии от источника. Системы, которые име- ют такие свойства, Андронов назвал автоколебательными, а неза- тухающие колебания, которые они осуществляют, — автоколеба-
ниями.
Если присмотреться к окружающему миру, то окажется, что авто- колебательные системы, разные по своим свойствам, встречаются нам везде — это духовые и смычковые музыкальные инструменты; часовые механизмы; электронные генераторы; разнообразные регуля- торы, которые применяются в технике; поршневые двигатели; меха- нические автоколебания, обусловленные трениям, очень распростра- нены в виде разного рода скрипов; автоколебания, связанные с обра- зованием вихрей при обтекании потоком среды некоторых препятст- вий (струна, стержень, крыло самолета) или проникновением потока сквозь узкие щели; процессы в живом организме, например, дыхание и работа сердца.
Если перечень таких непохожих явлений объединяется термином “автоколебания”, то это означает, что такие явления имеют некото- рые общие свойства и могут рассматриваться с единой точки зрения. Следует отметить, что исследование конкретной автоколебательной системы может быть очень сложным. В этом параграфе мы проана- лизируем общие характеристики автоколебательных систем и попро- буем провести некоторые исследования.
11.10.2. Основные определения и свойства
Современное определение автоколебаний можно сформу- лировать следующим образом [26, с. 155]. Автоколебания — это не-
затухающие колебания в нелинейной диссипативной системе, тип и свойства которых определяются самой системой и не зависят от начальных условий (разве что в конечной области).
Обсудим это определение. Во-первых, следует отметить, что есте- ственные макроскопические системы теряют свою энергию со вре- менем. Это происходит, например, вследствие механического трения, электрического сопротивления или других механизмов необратимого преобразования энергии системы в тепло. Поэтому, исключая из рас- смотрения примеры типа планетарных систем (где диссипацией, ве- роятно, можно пренебречь) или колебаний молекул (которые описы- ваются законами квантовой механики), будем рассматривать дисси- пативные системы, где всегда нужно учитывать, что без постоянного поступления энергии в систему колебания затухают. Поэтому автоко-
Андронов Александр Александрович (1901—1952) — российский физик, академик АН СРСР (1946).
734
лебательная система должна иметь внутренний источник энергии. В маятниковых часах колебания поддерживаются за счет потенциаль- ной энергии поднятого груза или сжатой пружины. Электронные ча- сы или другие электронные генераторы потребляют энергию от элек- трического источника питания. Ритмическое сокращение сердечной мышцы или излучение световых импульсов светлячками происходит по счет химических реакций в этих системах.
Во-вторых, отметим, что автоколебаниям свойственна устойчи- вость колебаний системы относительно их возмущения. Как мы зна- ем, периодические движения в консервативной системе описывают- ся совокупностью замкнутых кривых на фазовой плоскости. Если вследствие некоторого возмущения изменилось движение в такой системе, то она и в дальнейшем останется в возмущенном состоянии. Другими словами, консервативная периодическая система “помнит” начальные условия. Теперь вернемся к автоколебательной системе, где также происходит периодическое движение. На фазовой плоско- сти такому движению также соответствует замкнутая кривая, кото- рую называют предельным циклом. Такое название отражает специ- фику автоколебаний. Дело в том, что когда мы “столкнем” фазовую точку с предельного цикла, она со временем вернется на него, т.е. ав- токолебательная система восстанавливает свое движение при его на- рушении. Это означает, что автоколебания в системе не зависят от начальных условий. Со временем фазовая траектория, соответст- вующая некоторым начальным условиям, стремится к предельному циклу, т.е. в колебательной системе после переходного процесса воз- никают колебания, которым соответствует движение фазовой точки по предельному циклу. Итак, предельный цикл представляет собой аттрактор. Таким образом, автоколебания зависят только от пара- метров системы, а не от начальных условий. Слова в определении “разве что, в конечной области” — означают, что, в принципе, могут существовать несколько аттракторов, каждый из которых имеет свой бассейн притяжения.
Существенным моментом для поддержания установившихся коле- баний в автоколебательной системе является ее нелинейность. Для по- нимания физической природы этого момента рассмотрим энергетиче- ский баланс колебаний. Пусть колебания уже происходят. Понятно, что энергия этих колебаний должна затухать вследствие трения (или вследствие передачи колебательной энергии потребителю). Однако по- тери энергии пополняются за счет источника, от которого порция энергии в течение каждого периода (или вообще периодически) посту- пает в колебательную систему. Понятно, что установившиеся колеба- ния возможны в том случае, когда поступление энергии от источника за период будут точно равняться потерям энергии за то же время. Это условие баланса энергии и является условием существования незату-
735
хающих колебаний. Если баланс будет нарушен, например, пополнение затрат будет недостаточным, то колебания будут затухать. Если же, наоборот, энергии от источника будет поступать чрезмерно, то колеба- ния будут нарастать.
Теперь можно составить представление и о механизме самовозбу- ждения. Если вначале, т.е. при наименьших амплитудах, поступление энергии превышает потери, то амплитуда колебаний нарастает. Если бы это соотношение между поступлением и потерями энергии сохра- нялось всегда, то амплитуда увеличивалась бы бесконечно. Таким об- разом, для получения установившихся колебаний необходимо, чтобы, начиная с некоторого значения амплитуды, потери возрастали при дальнейшем увеличении амплитуды быстрее, чем пополнение энергии от источника. При таком условии возможно достижение энергетиче- ского баланса.
Все это иллюстрируется графиком на рис. 11.10, а, здесь энергия, поступающая от источника обозначена Е+, энергия потерь в колеба- тельной системе — Е–. Энергии Е+ и Е– зависят от амплитуды колеба- ний А. Точка пересечения кривых Е+ и Е– соответствует балансу энер- гий; абсцисса этой точки — амплитуде А0 установившихся колебаний. График на рис. 11.10, а дает возможность провести простой анализ устойчивости установившегося колебательного движения системы. Напомним, что устойчивым положением равновесия называют такое состояние системы, когда система к нему возвращается, будучи из него выведенной свободными колебаниями. Неустойчивое положение равновесия, наоборот, соответствует ситуации, когда система при наименьшем отклонении не возвращается к нему. Аналогично можно говорить об устойчивом колебательном движении — оно имеет место, если система, колебательное движение которой нарушено некоторым внешним воздействием, возвращается к начальному режиму после окончания действия внешнего воздействия. Наоборот, движение бу- дет неустойчивым, если любое малое внешнее воздействие выводит систему из колебательного режима, от которого система отходит все дальше. Для наших целей достаточно такого упрощенного понятия об устойчивости.
Рассмотрим теперь, устойчивым или неустойчивым является дви- жение, представленное на рис. 11.10, а. Для проверки устойчивости возьмем два значения амплитуды — меньше и больше, чем А0 (штри- ховые линии на рис. 11.10, а). Легко видеть, что в первом случае име- ем Е+ > Е– и, значит, амплитуда колебаний будет нарастать, пока не достигнет значения А0. Во втором случае Е+ < Е– и, соответственно, амплитуда будет уменьшаться, пока не достигнет значения А0. Итак, точка пересечения с абсциссой А0 есть точка устойчивого колебатель- ного движения.
736

Рис. 11.10. Энергетические диаграммы диссипации энергии (Е–) и притока энергии в систему от источника (Е+)
Начало координат О, где пересекаются кривые Е+ и Е–, является положением равновесия. Причем это положение равновесия неустой- чивое; в чем нетрудно убедиться, рассматривая колебательный про- цесс при некоторой малой амплитуде. Таким образом, условием само-
возбуждения автоколебательной системы является условие неус- тойчивости ее состояния равновесия.
Кривые Е+ и Е– могут пересекаться в нескольких точках (рис. 11.10, б). На рисунке видно три точки пересечения. Рассуждая аналогично, легко установить, что две из них устойчивые (точки с абсциссами О и А0). Поскольку начало координат О является точкой устойчивого равновесия, то система в отсутствии внешнего воздейст- вия будет сохранять состояние покоя. Однако это не означает, что в ней устойчивые автоколебания невозможны. Действительно, пред- ставим себе, что некоторый внешний толчок возбуждает в системе колебания с амплитудой, большей, чем А1. Если это произойдет, то в дальнейшем система будет раскачиваться самостоятельно до ампли-
туды А0.
Такой случай, когда для самораскачки автоколебательной системы нужен начальный толчок, называется жестким самовозбуждением. В противоположность этому, случай (рис. 11.10, а), когда для раскачи- вания системы достаточно малого начального возбуждения, которое всегда возникает вследствие тех или иных флуктуаций, — называется
мягким самовозбуждением.
На основе проведенного анализа можно сделать еще один вывод принципиального характера. Если бы система была линейной, то, как потери энергии, так и ее прирост возрастали бы по одинаковому за- кону, а именно: пропорционально квадрату амплитуды. Графически кривые Е+ и Е– были бы представлены двумя параболами, которые проходят через начало координат, но больше не имеют точек пересе- чения, при этом одна из парабол была бы расположена выше. В этом случае или система не возбуждается совсем, или она мягко самовоз-
737

буждается, но амплитуда колебаний бесконечно возрастает. Поэтому режим установившихся колебаний с конечной амплитудой возможен только в нелинейной системе. Отметим, что нелинейные свойства может иметь любое звено, которое входит в структуру автоколеба- тельной системы.
Приведенные рассуждения позволяют выделить в простых автоко- лебательных системах следующие основные элементы:
•колебательную систему с демпфированием;
•источник энергии и преобразователь энергии источника в энер- гию колебаний;
•нелинейный ограничитель;
•звено обратной связи.
Хотя речи о звене обратной связи не было, но читатель, наверное, подсознательно понимал, что в системе такое звено должно быть. Действительно, за счет этого звена колебательная система должна сама регулировать поступление энергии в систему от источника та- ким образом, чтобы выполнялись две условия, которые называют ам- плитудным и фазовым:
1)энергия источника, которая преобразуется в энергию колеба- ний, должна компенсировать потери;
2)эта энергия должна поступать в колебательную систему в нуж- ной фазе, чтобы содействовать усилению колебаний.
Ниже на примере конкретной автоколебательной системы попро- буем выделить приведенные выше основные элементы.
11.10.3. Маятниковые часы
В 1656 г. Гюйгенс запатентовал первые маятниковые ча- сы. Уже через два года часовой мастер из Утрехта Самюэль Костер построил маятниковые часы и гарантировал недельное отклонение менее восьми минут [40, с. 19]. Это изобретение сыграло выдающую- ся роль в развитии физики, астрономии и техники. Свою повседнев- ную жизнь мы не представляем без часов, и, наверное, никогда не задумывались над тем, какая идея положена в основу их работы. Оказывается, что часы любой конструкции представляет собой авто- колебательную систему.
Прежде чем говорить о часах, являющихся достаточно сложной системой, рассмотрим конструкцию маятника на рис. 11.11 [ ]. Ма- ятник представляет собой автоколебательную систему, причем меха- низм ее действия очень прост. В начальный момент времени ключ 5
Агафонов Ф.И., Селицер С.И. Необычный маятник // Квант. — 1988. —
№11, 12. — С. 57—58.
738
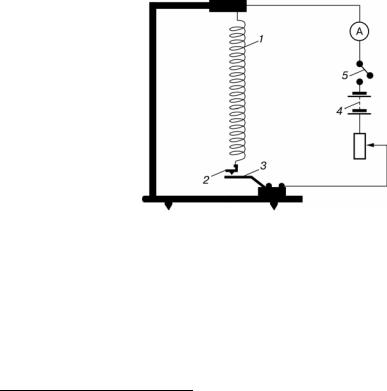
разомкнут и контакты 2 и 3 замкнуты. При замыкании ключа по виткам спиральной пружины проходит ток и сила Ампера , дейст- вующая между ними, вынуждает их притягиваться один к другому. Как следствие, пружина сжимается, и электрический контур между контактами 2 и 3 размыкается. Далее, пружина начинает разжи- маться, снова замыкается электрический контур, и так далее. Проис- ходят незатухающие колебания. Как и в любой автоколебательной системе, здесь можно выделить следующие составные части:
•источник энергии — батарея 4;
•колебательная система — пружина;
•устройство, которое регулирует поступление энергии в колеба- тельную систему, — пружина и контакты 2 и 3;
•звено обратной связи. Действие звена состоит в том, что электри- ческий ток (внешний фактор) порождает магнитное поле, которое вы- зывает сжатие пружины и размыкание электрического контура. При этом появляется сила упругости (внутренняя сила пружины), кото- рая снова замыкает электрический контур. Понятно, что этот ме- ханизм имеет нелинейный характер.
Рис. 11.11. Схема маятника:
1 — пружина; 2 и 3 — контакты; 4 — электрическая батарея; 5 — ключ
Отметим, что сила тяжести существенной роли не играет, поэтому такая система будет функционировать и в невесомости. Поступление энергии в колебательную систему равно потерям энергии за счет тре- ния, поэтому такая система будет выполнять незатухающие колеба- ния до тех пор, пока не исчерпается источник энергии.
Ампер (Ampere) Андрэ Мари (1775—1836) — французский физик и ма- тематик.
739
Теперь рассмотрим маятниковые часы. На рис. 11.12 представле- ны основные элементы одного из простейших вариантов маятнико- вых часов [13, с. 109—110]. На оси А подвешен маятник с присоеди- ненным к нему равноплечным рычагом 1 — анкером (маятник на ри- сунке не показан). На оси В расположено ходовое колесо 2, которое вынуждает двигаться гиря. Она подвешена на цепи, которая переки- нута через зубчатое колесо, расположенное на оси В. Анкер и ходовое колесо сцепляются благодаря взаимодействию палетт 3 с зубьями хо- дового колеса 2. Если бы сцепления не было, то анкер и маятник под действием начального толчка выполняли бы свободные затухающие колебания, а ходовое колесо поворачивалось бы до тех пор, пока гиря не оказалась бы в своем нижнем положении. Понятно, что никаких автоколебаний в такой ситуации не возникает. Однако в состоянии сцепления, представленного на рис. 11.12, система становится авто- колебательной.
Поверхности палетт а1 и а2 представляют собой поверхности кру- говых цилиндров, осью которых является ось А. Когда зуб ходового колеса находится в контакте с любой из этих поверхностей, то на- правление силы, с которой он давит на нее, проходит через ось А и ее момент относительно этой оси равен нулю. Ходовое колесо, а следова- тельно и гиря при этом неподвижны. Поверхности b1 и b2 — плоские. Когда зуб ходового колеса скользит по ним, то возникает момент силы относительно оси маятника А. Под действием этого момента анкер отклоняется по часовой стрелке, когда зуб касается поверхности b1, и против часовой стрелки, когда зуб касается поверхности b2. При этом ходовое колесо поворачивается на определенный угол (за период ко- лебаний маятника ходовое колесо поворачивается на два зуба), и ги- ря соответственно опускается. Таким образом, маятник колеблется свободно (при этом, или поверхность а1, или а2 скользит по поверхно- сти зуба ходового колеса) за исключением коротких (по сравнению с его собственным периодом) промежутков времени, в течение которых происходит контакт между одним из зубьев ходового колеса и одной из плоскостей b1, b2, при этом маятник получает короткий импульс влево или вправо. Эти моменты силы возникают при соответствую- щих положениях маятника; они задаются не извне, как при вынуж- денных колебаниях, а определяются движением маятника. Палетты и зубья ходового колеса сконструированы так, что поверхность b1 по- падает под зуб, когда маятник проходит через вертикальное положе- ние, двигаясь справа налево, а поверхность b2 попадает под зуб, ко- гда маятник также проходит через вертикальное положение, но дви- гаясь слева направо. Таким образом, в обоих случаях момент силы направлен по ходу маятника, т.е. содействует его раскачиванию.
740