

Математическое описание функциональных элементов сау
Функциональные элементы САУ описываются в соответствии с общими правилами математического описания динамических звеньев и представляются определенными типовыми звеньями.
Коэффициенты уравнения (либо передаточной функции) звена рассчитываются на основании технических характеристик конкретного функционального элемента, в соответствии с паспортными данными описываемого устройства.
Например, термопара ХК:
- диапазон измерения – 0 ÷ 600 ºС;
- выходной сигнал при 600 ºС (согласно градуировочной характеристики) – 49,094 мВ;
- время установления выходного сигнала на уровне 0,95Θвх – не более 4 с; 10 с; 20 c; 60 c и т. д
Из этого следует, что динамические свойства данной термопары могут быть описаны инерционным звеном 1 порядка:
 ,
(13.7)
,
(13.7)
где
 (13.8)
(13.8)
 .
(13.9)
.
(13.9)
Аналогично составляются математические описания всех динамических звеньев структурной схемы проектируемой САУ: регулирующего органа, исполнительного механизма, промежуточных преобразователей и т. п.
При проектировании промышленных САУ есть одна важная особенность: современные высокопроизводительные технологические агрегаты (ТОУ) обладают значительной инерционностью, вызванной их большими объемами и большими расходами сырьевых компонентов.
В связи с этим, как правило, инерционность технологических объектов значительно превышает инерционность остальных функционально-необходимых элементов (измерительных устройств, исполнительных механизмов и регулирующих органов, промежуточных преобразователей и т. п.)
Наличие преобладающей постоянной времени одного из элементов схемы позволяет пренебречь инерционностью остальных функционально-необходимых элементов, т. к.
 и
тогда большинство (либо все) функциональные
элементы (кроме ТОУ) системы автоматического
управления могут быть представлены
безынерционными (пропорциональными)
звеньями и их описание сводится к
определению коэффициента передачи
каждого функционального элемента
и
тогда большинство (либо все) функциональные
элементы (кроме ТОУ) системы автоматического
управления могут быть представлены
безынерционными (пропорциональными)
звеньями и их описание сводится к
определению коэффициента передачи
каждого функционального элемента
Лекция 14 Типовые регуляторы
Современные вентильные (с тиристорными или транзисторными преобразователями) электроприводы выполнены как замкнутые системы регулирования с обратными связями по напряжению, току и(или) скорости.
Их настройка осуществляется соответствующими регуляторами, которые реализованы как типовые узлы, выполненные на стандартной полупроводниковой элементной базе, с единообразной стандартной методикой настройки.
Предпочтение отдается регуляторам с наиболее простыми передаточными функциями: пропорциональному, интегральному, пропорционально-интегральному.
15.1 Пропорциональный (п-) регулятор.
Принципиальная схема этого регулятора приведена на рис. 14.1 в, а его передаточная функция
Обратим внимание на следующую особенность функционирования замкнутой системы с П-регулятором. Часто неизменяемая часть системы (объект регулирования ОР) представлена набором звеньев, имеющих конечный коэффициент усиления. В этом случае, чтобы получить на выходе системы регулирования сигнал Xвых, отличный от нуля, на вход неизменяемой части следует подать ненулевой сигнал Ху, снимаемый с выхода регулятора Р (см. рис. 15.2).
В свою очередь, при ненулевом сигнале Ху в схеме с П-регулятором должна быть отлична от нуля ошибка регулирования – величин
Эту ошибку можно уменьшить, если увеличить коэффициент усиления k регулятора и всей системы.
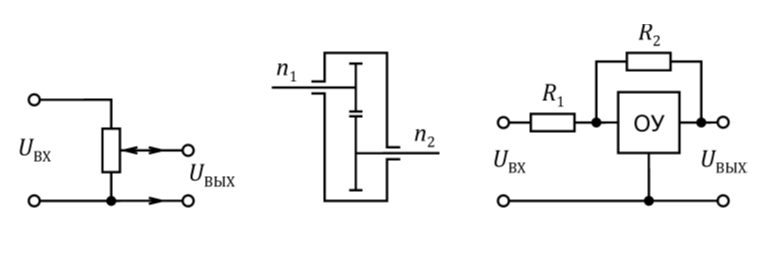
Рис. 14.1. Примеры пропорциональных звеньев: а) потенциометр; б) механический редуктор; в) П-регулятор
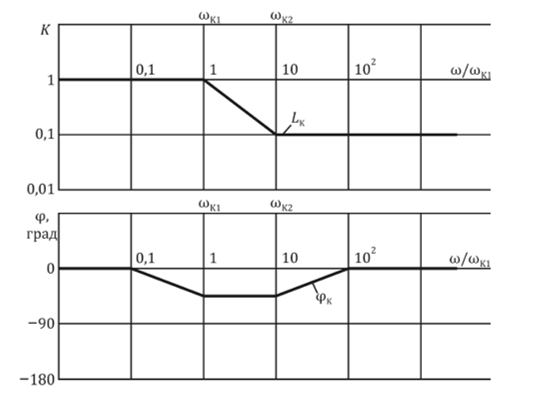
Рис. 14.2. Аппроксимированные амплитудная Lк и фазовая φк ЛЧХ звена с отставанием по фазе
Изменение величины k не вызывает изменения фазовой частотной характеристики, что положительно оценивается при настройке. Но ЛАЧХ разомкнутой системы при этом смещается по вертикали, не изменяя формы. При этом частота среза также изменяется. В результате попытка снизить ошибку регулирования Δx увеличением k неизбежно влечет увеличение частоты среза, в результате на устойчивость контура начинают влиять звенья с неучтенными ранее малыми постоянными времени.
Результат настройки замкнутой системы с П-регулятором, – как правило, компромисс между статической точностью и условиями устойчивости.