

Лекция 7
Я сюда сначала напишу критерий Найквиста, потому что мы его не успели разобрать на прошлой лекции, а затем статические и астатические системы.
Критерий устойчивости Найквиста
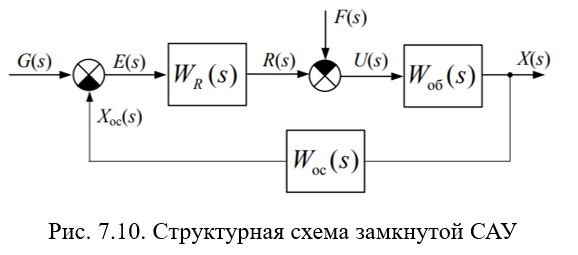
Критерий Найквиста позволяет судить об устойчивости замкнутой САУ (рис. 7.10) по амплитудно-фазовой частотной характеристике разомкнутой системы.
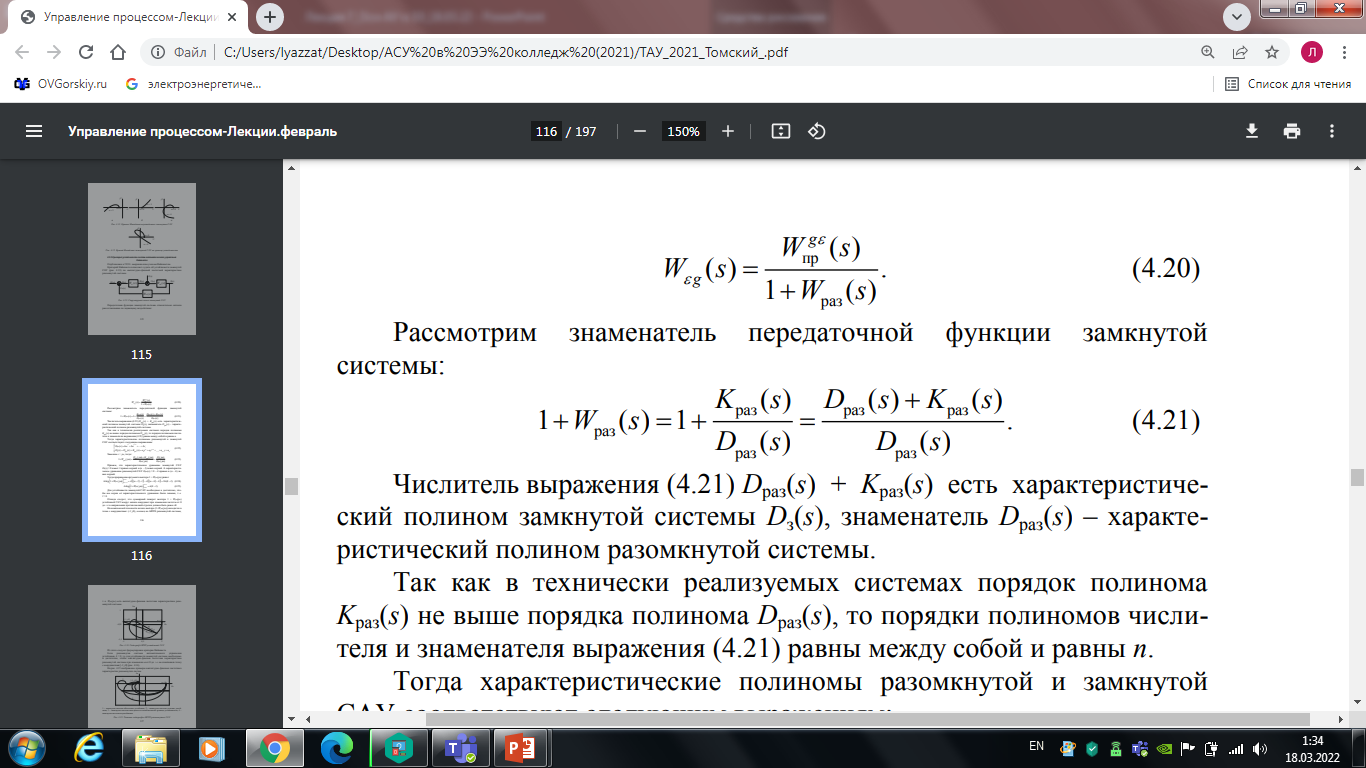
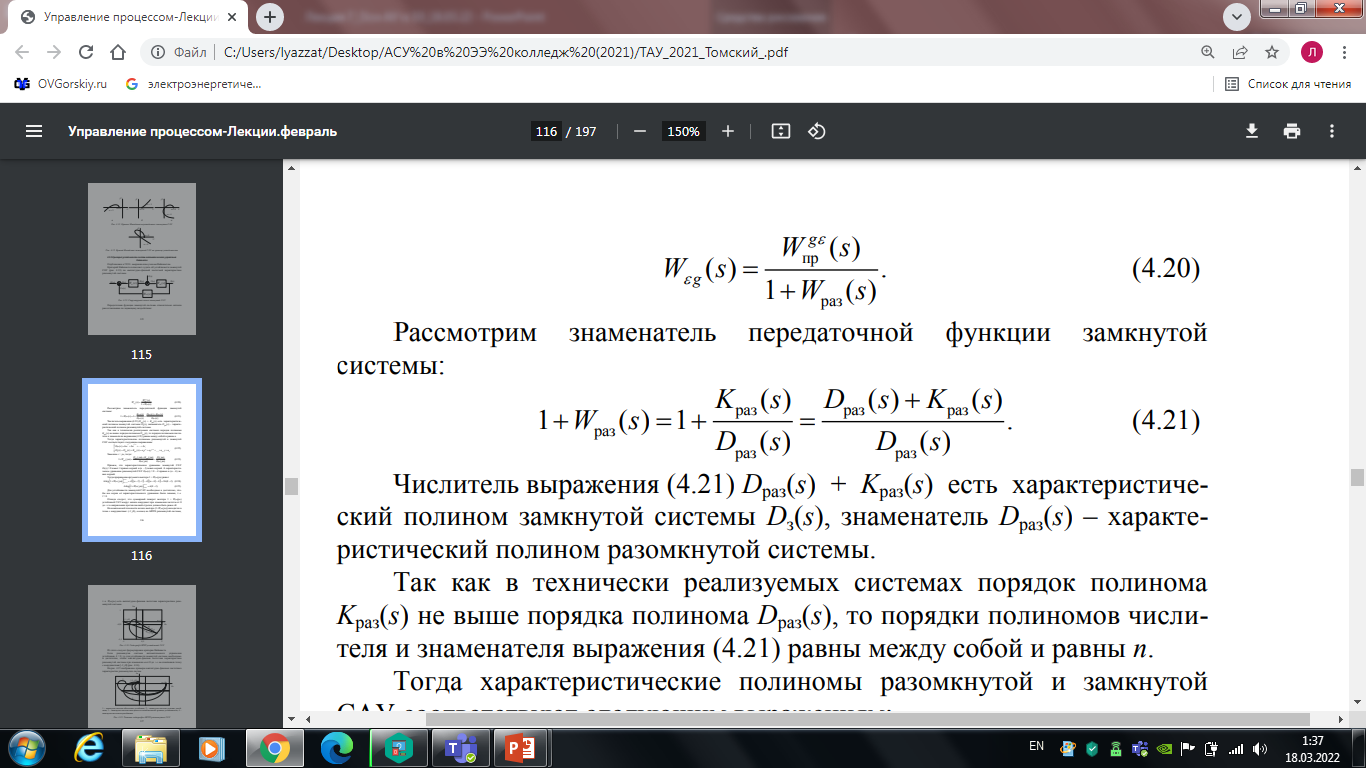
Передаточная функция замкнутой системы относительно сигнала рассогласования по задающему воздействию (видимо Wос=1?):
 (7.20)
(7.20)
Рассмотрим знаменатель передаточной функции замкнутой системы:
 (7.21)
(7.21)
Числитель выражения (7.21) Dраз(s)+Kраз(s) есть характеристический полином замкнутой системы Dз(s), знаменатель Dраз(s) – характеристический полином разомкнутой системы. Так как в технически реализуемых системах порядок полинома Kраз(s) не выше порядка полинома Dраз(s), то порядки полиномов числителя и знаменателя выражения (7.21) равны между собой и равны n.
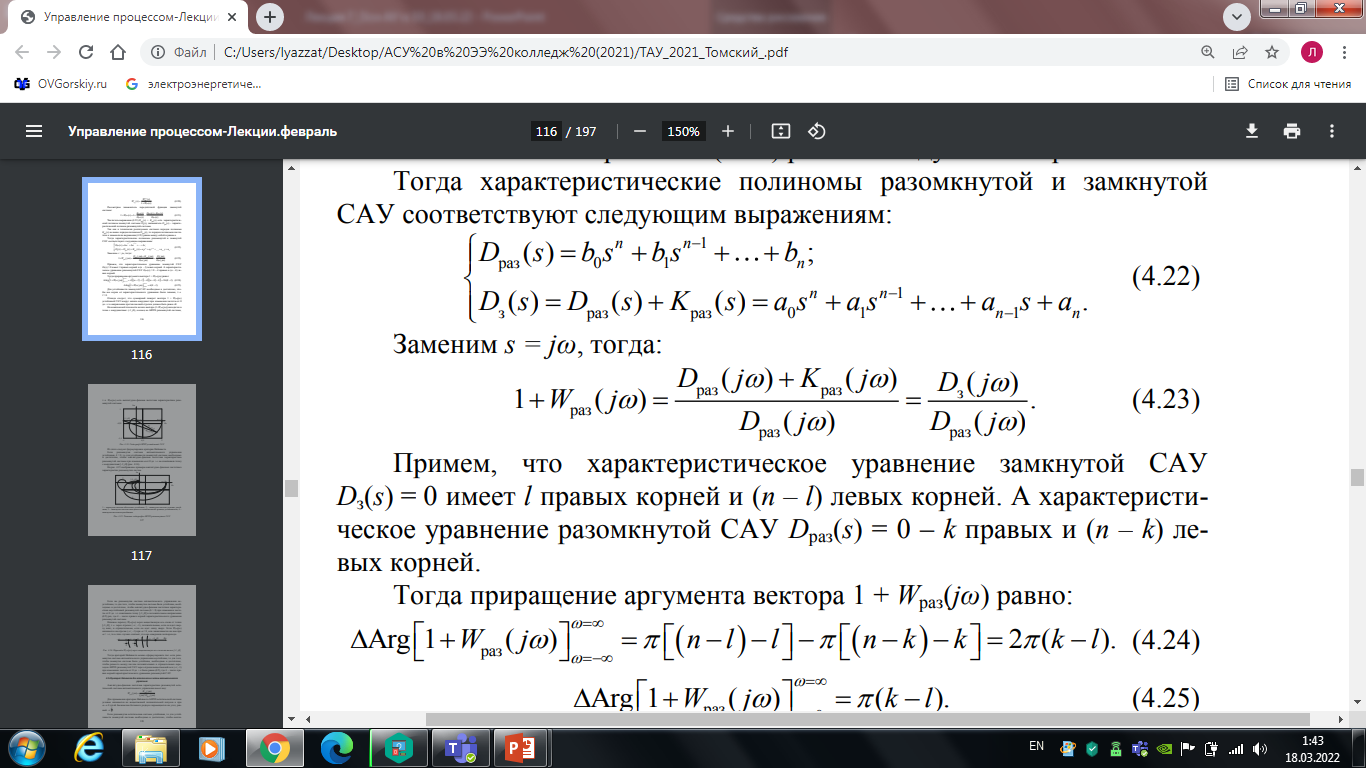
Тогда характеристические полиномы разомкнутой и замкнутой САУ соответствуют следующим выражениям:
 (7.22)
(7.22)
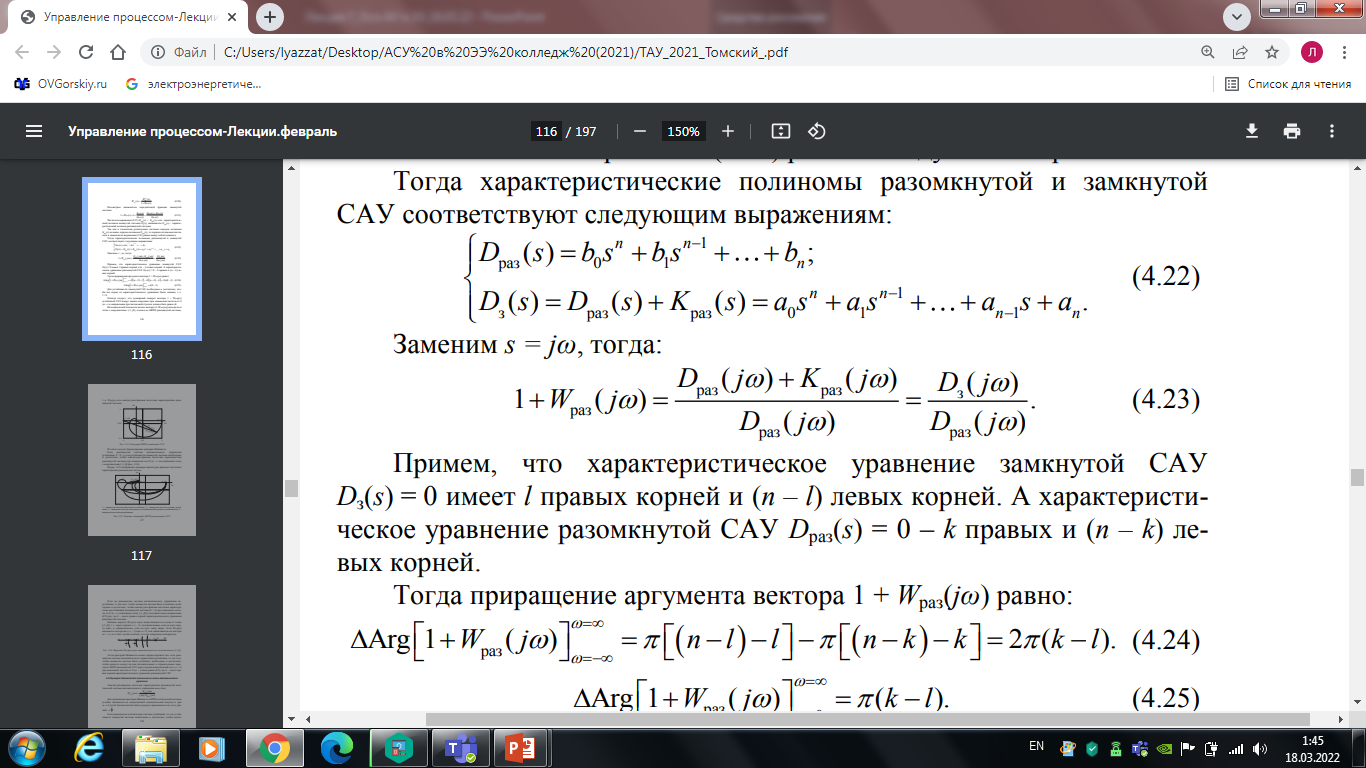 (7.23)
(7.23)
Примем, что характеристическое уравнение замкнутой САУ Dз(s)=0 имеет l правых корней и (n–l) левых корней (тут имеется в виду вещественная часть положительная и отрицательная). А характеристическое уравнение разомкнутой САУ Dраз(s) = k правых и (n–k) левых корней.


Бля, я честно не знаю, как эти аргументы были посчитаны, тут надо подумать толково, а мне лень, поэтому ниже попытался объяснить. Но она тоже не знает, откуда они берутся, так что пофиг.
Если как-то по-простому объяснять, то у нас есть числитель и знаменатель. Когда умножаем комплексные числа, то углы складываются, когда делим, то вычитаются. У нас числитель (Dз(s)=0) имеет l правых корней и (n–l) левых корней. Нам важны левые корни, потому что они нам дают отрицательную вещественную часть и поворот против часовой стрелки, который как раз берётся со знаком плюс. Теперь, когда мы меняли ω от 0 до +∞, то мы умножали количество корней на угол π/2, а здесь мы меняем ω от -∞ до +∞, поэтому умножаем и на угол π.
Для устойчивости замкнутой САУ необходимо и достаточно, чтобы все корни её характеристического уравнения были левыми, т. е. l = 0.
Отсюда следует, что суммарный
поворот вектора 1+Wраз(jω)
устойчивой САУ вокруг начала координат
при изменении частоты от 0 до
 в направлении против часовой стрелки
должен быть равен
в направлении против часовой стрелки
должен быть равен
 .
.
На комплексной плоскости начало вектора (1+Wраз(jω)) находится в точке с координатами: (-1; j0), а конец на АФЧХ разомкнутой системы, т.к. Wраз(jω) есть амплитудно-фазовая частотная характеристика разомкнутой системы.
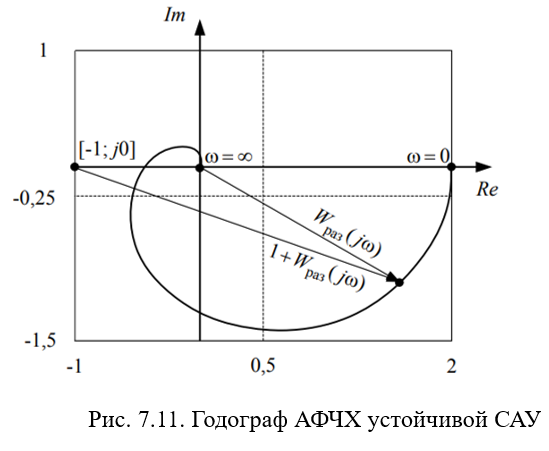
Из этого следуют формулировки критерия Найквиста.
1) Если разомкнутая система автоматического управления устойчивая (k=0), то для устойчивости замкнутой системы необходимо и достаточно, чтобы АФЧХ разомкнутой системы при изменении от 0 до +∞ не охватывала точку с координатами [-1; j0] (рис. 7.11).
2) Если
же разомкнутая
система автоматического управления
неустойчива,
то для того, чтобы замкнутая система
была устойчива, необходимо и достаточно,
чтобы АФЧХ неустойчивой разомкнутой
системы (k>0) при изменении частоты
от 0 до +∞ охватывала
точку
 в положительном направлении k/2
раз, где k – число
правых корней характеристического
уравнения разомкнутой системы.
в положительном направлении k/2
раз, где k – число
правых корней характеристического
уравнения разомкнутой системы.
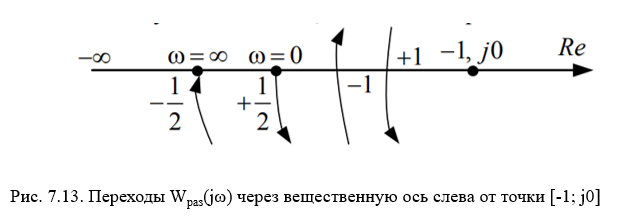
Назовём переход
Wраз(jω)
через вещественную ось слева от точки
,
т.е. через интервал
 ,
положительным, если
он идет сверху вниз,
и отрицательным, если он идет снизу
вверх. Если Wраз(jω)
начинается на интервале
при
,
положительным, если
он идет сверху вниз,
и отрицательным, если он идет снизу
вверх. Если Wраз(jω)
начинается на интервале
при
 или заканчивается на нем при
или заканчивается на нем при
 ,
то в этих случаях считают, что она
совершила полперехода.
,
то в этих случаях считают, что она
совершила полперехода.
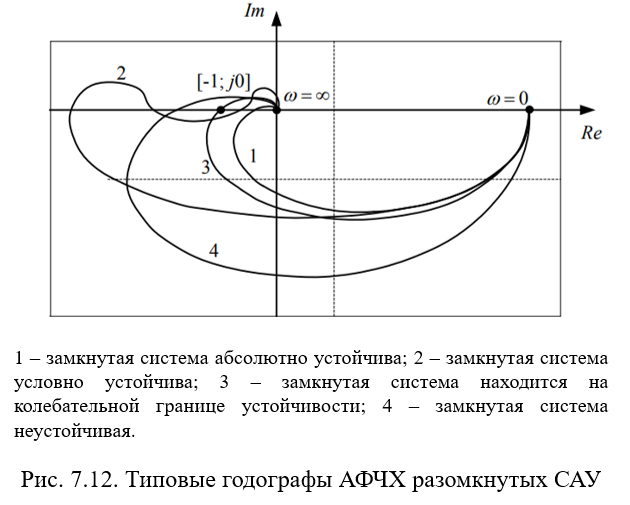
На рис. 7.12 изображены примеры амплитудно-фазовых частотных характеристик разомкнутых систем.
Тогда критерий Найквиста
можно сформулировать так: 3)
если разомкнутая
система автоматического управления
неустойчива,
то для того, чтобы замкнутая система
была устойчива, необходимо и достаточно,
чтобы разность
между числом положительных и отрицательных
переходов АФЧХ разомкнутой САУ через
отрезок вещественной оси
 при изменении частоты от 0 до +∞ была
равна k/2, где k – число
правых корней характеристического
уравнения разомкнутой САУ.
при изменении частоты от 0 до +∞ была
равна k/2, где k – число
правых корней характеристического
уравнения разомкнутой САУ.
Опять пример с кучей формул, просто картинкой вставлю.
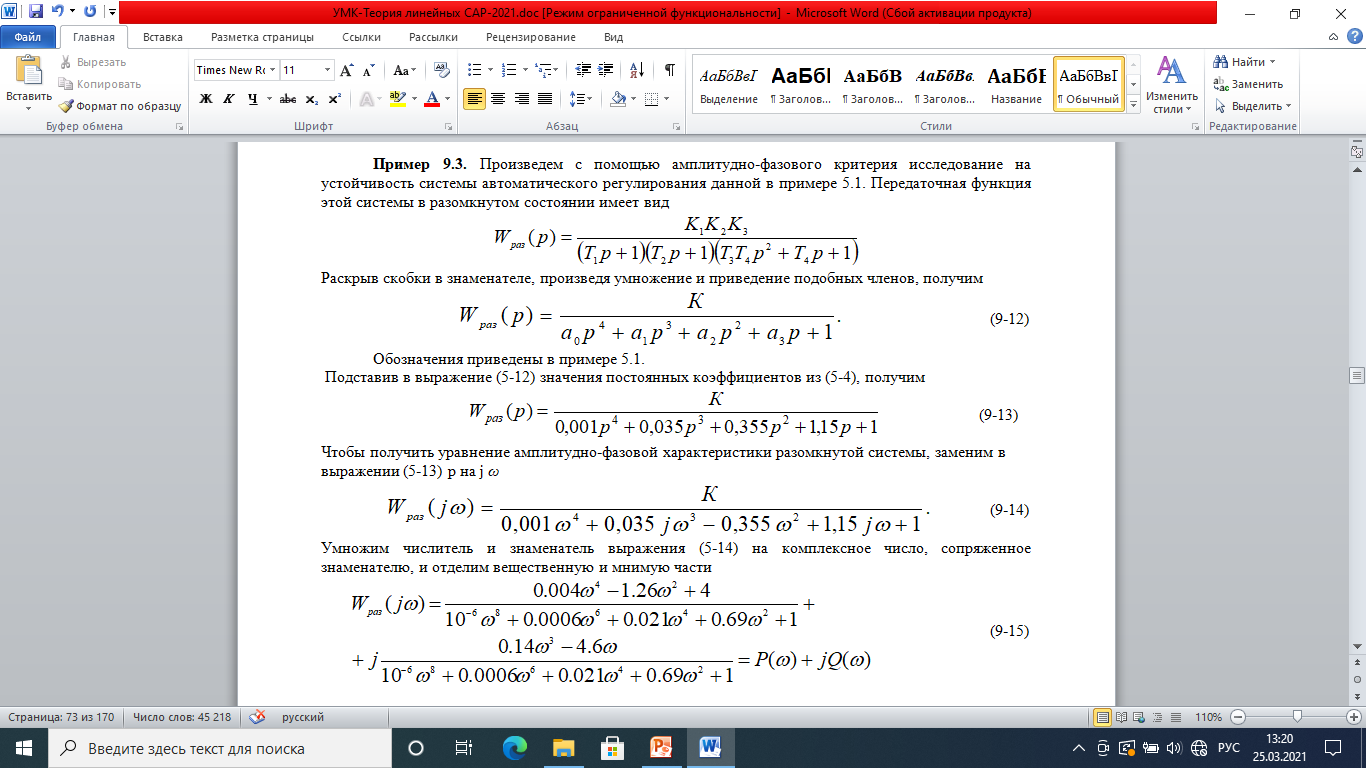
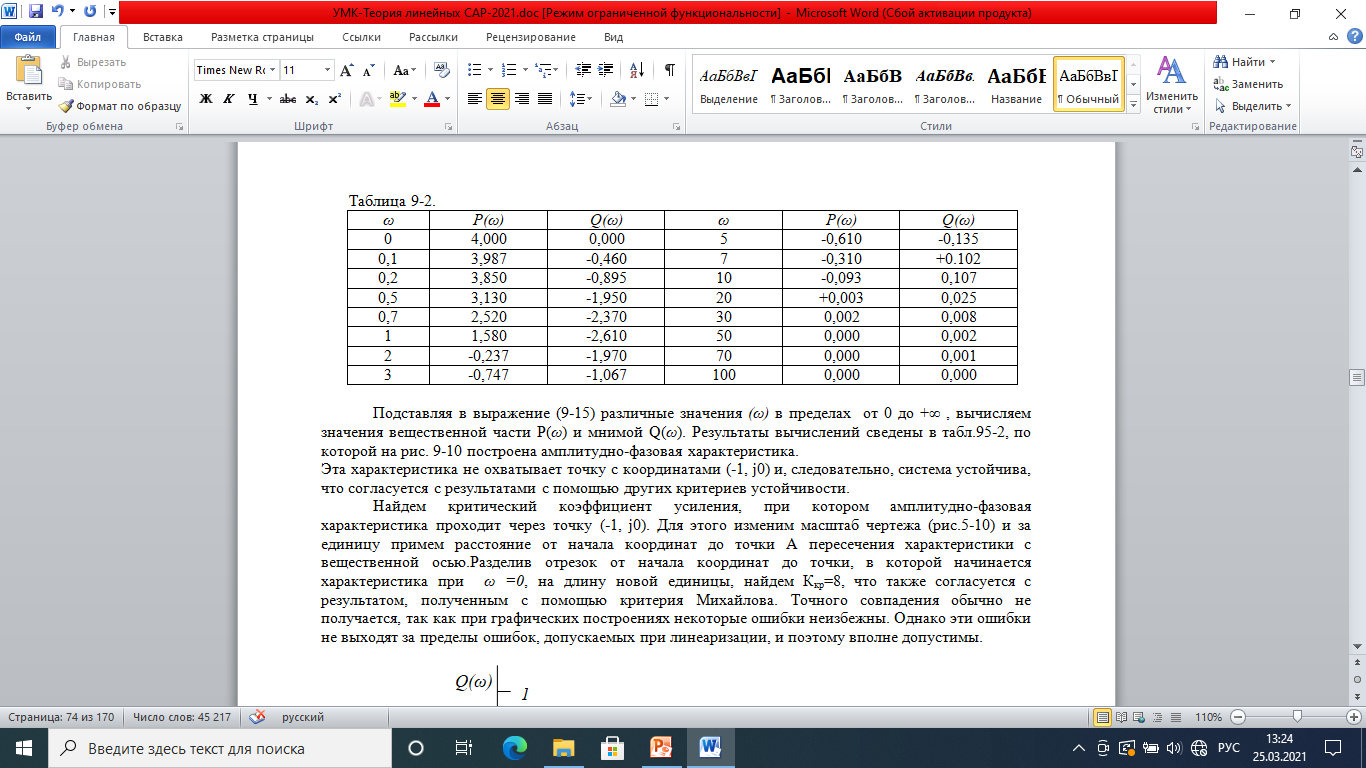
Подставляя в выражение (9-15) различные значения ω в пределах от 0 до +∞ , вычисляем значения вещественной части Р(ω) и мнимой Q(ω). Результаты вычислений сведены в табл.9-2, по которой на рис. 9-10 построена амплитудно-фазовая характеристика.
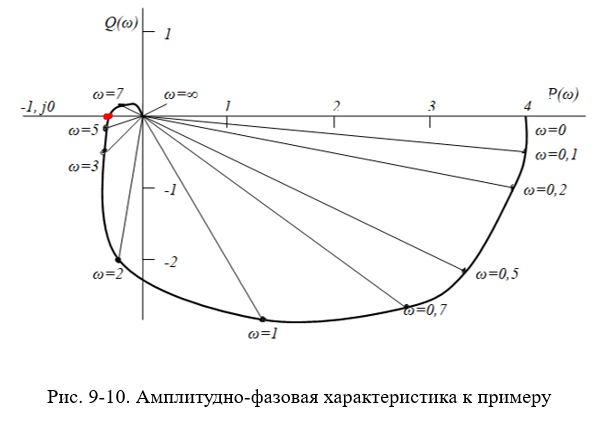
Эта характеристика не охватывает точку с координатами (-1, j0) и, следовательно, система устойчива, что согласуется с результатами с помощью других критериев устойчивости.
Найдём критический коэффициент усиления, при котором амплитудно-фазовая характеристика проходит через точку (-1, j0). Для этого изменим масштаб чертежа (рис.9-10) и за единицу примем расстояние от начала координат до точки А (красная точка) пересечения характеристики с вещественной осью. Разделив отрезок от начала координат до точки, в которой начинается характеристика при ω =0, на длину новой единицы, найдём Ккр=8, что также согласуется с результатом, полученным с помощью критерия Михайлова. Точного совпадения обычно не получается, так как при графических построениях некоторые ошибки неизбежны. Однако эти ошибки не выходят за пределы ошибок, допускаемых при линеаризации, и поэтому вполне допустимы.