

Представление афчх на комплексной плоскости
Комплексная функция частоты
 называется амплитудно-фазовой частотной
характеристикой – АФЧХ динамического
звена Ее модуль есть АЧХ, а аргумент –
ФЧХ. На комплексной плоскости
величина
называется амплитудно-фазовой частотной
характеристикой – АФЧХ динамического
звена Ее модуль есть АЧХ, а аргумент –
ФЧХ. На комплексной плоскости
величина изображается
вектором, длина которого равна отношению
амплитуд, а угол – разности фаз выхода
и входа.
изображается
вектором, длина которого равна отношению
амплитуд, а угол – разности фаз выхода
и входа.
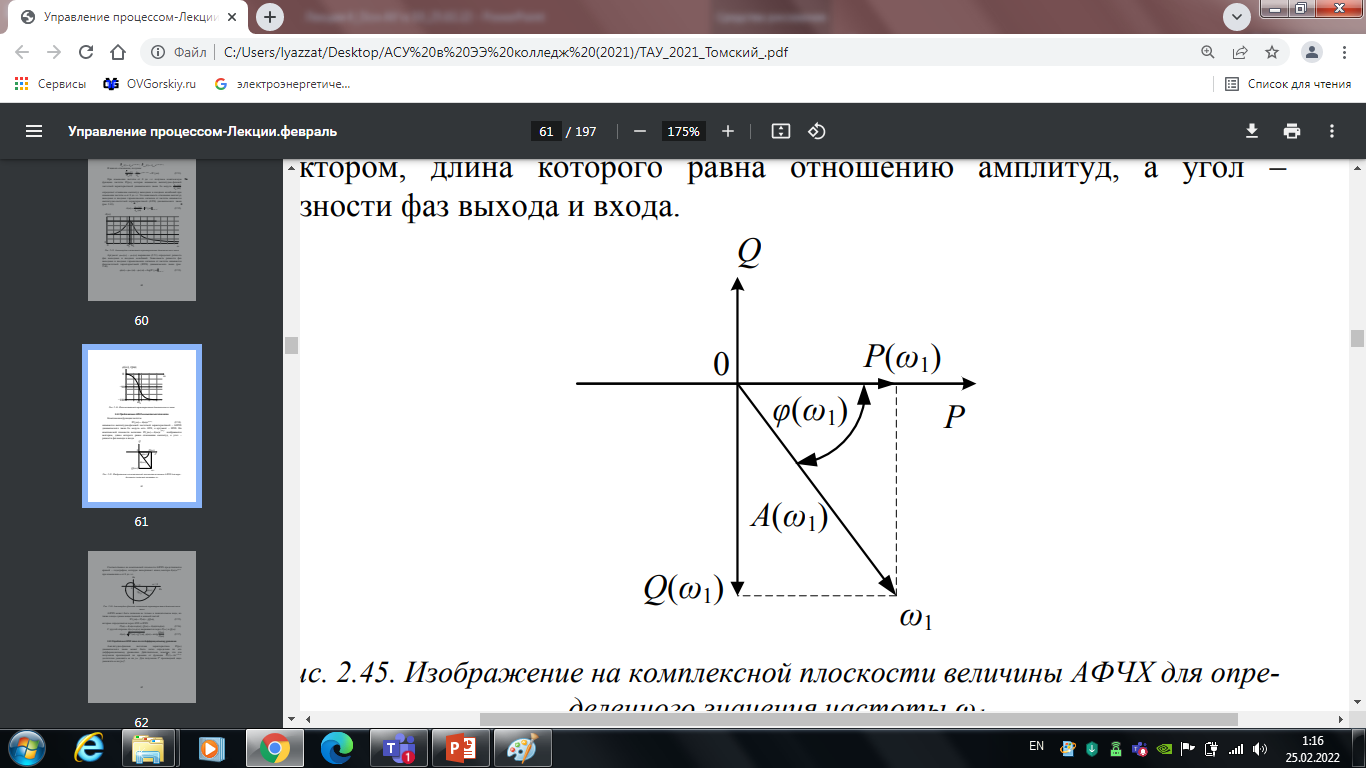
Рис.4.3. Изображение на комплексной плоскости величины АФЧХ для определенного значения частоты ω1
Соответственно на комплексной плоскости
АФЧХ представляется кривой – годографом,
которую вычерчивает конец вектора
 при
изменении ω от 0 до +∞.
при
изменении ω от 0 до +∞.
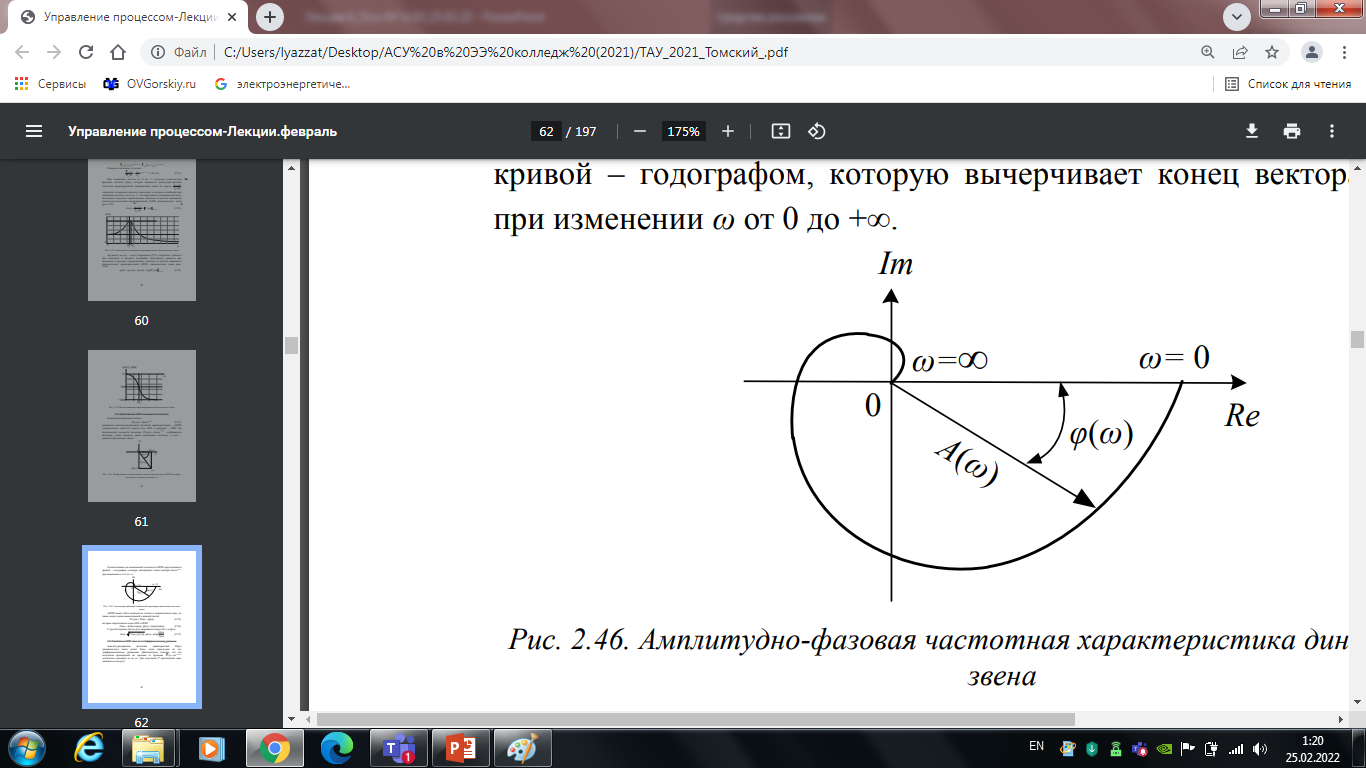
Рис. 4.4. Амплитудно-фазовая частотная характеристика динамического звена
АФЧХ может быть записана не только в показательном виде, но и также в виде суммы вещественной и мнимой частей:
![]()
Которые определяются через АЧХ и ФЧХ:
Логарифмические частотные характеристики
При расчетах в системах автоматического
регулирования весьма удобными оказались
логарифмические частотные характеристики.
В этом случае угловая частота
откладывается по оси абсцисс в
логарифмическом масштабе, то есть
откладывается десятичный логарифм
частоты, а около отметки указывается
само значение частоты (рис. 4.5а). Иногда
на оси абсцисс указывают значение
десятичного логарифма частоты
 ,
реже – логарифма при основании два –
,
реже – логарифма при основании два –
 (см. рис. 4.5 б, в).
(см. рис. 4.5 б, в).
Единица приращения десятичного логарифма
соответcтвует удесятерению частоты,
которое называется декадой. Единица
приращения
,
соответствующая удвоению частоты,
называется октавой. Одна октава
соответствует 0,303 декады, так как
 .
.
Чтобы обосновать выбор масштабов по осям ординат для амплитуды и фазового сдвига , возьмем выражение для амплитудной частотной характеристики в показательной форме:

и прологарифмируем его:
 .
.
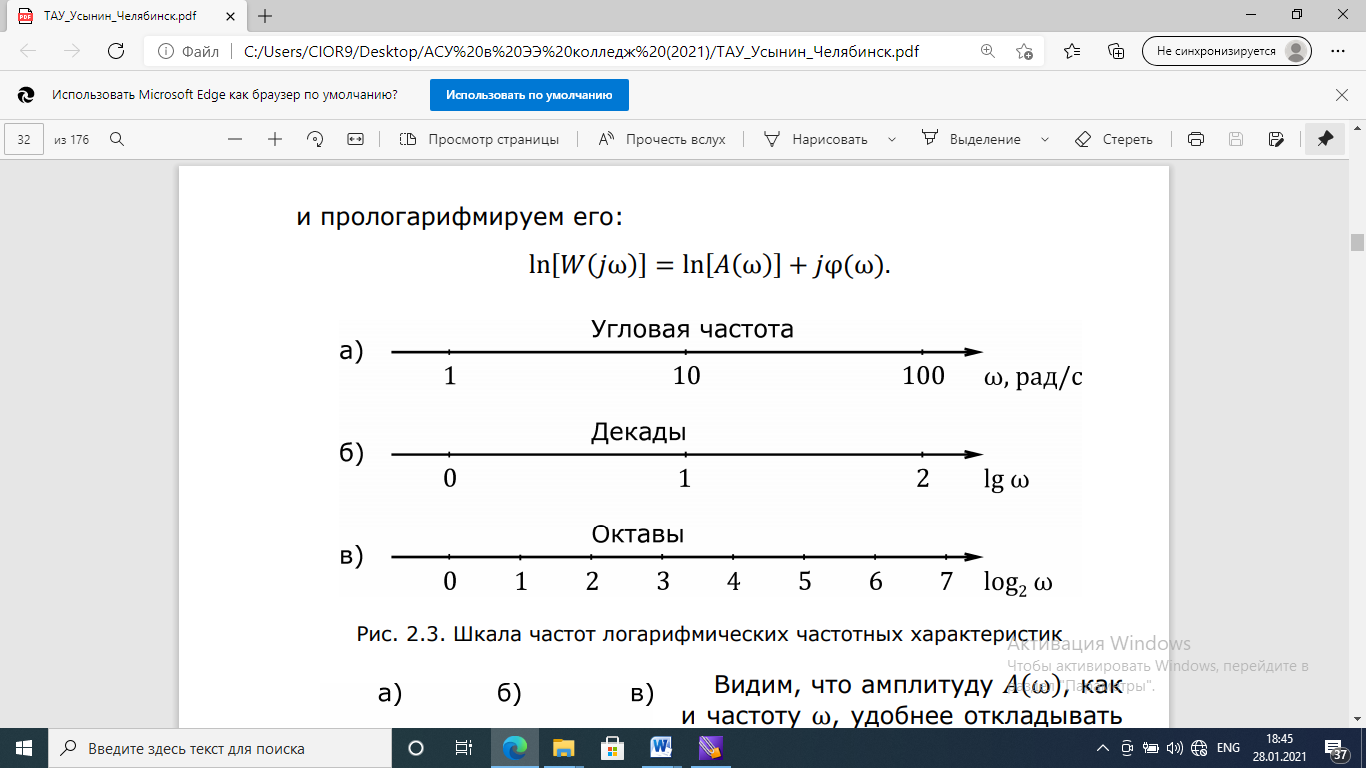
Рис. 4.5. Шкала частот логарифмических частотных характеристик
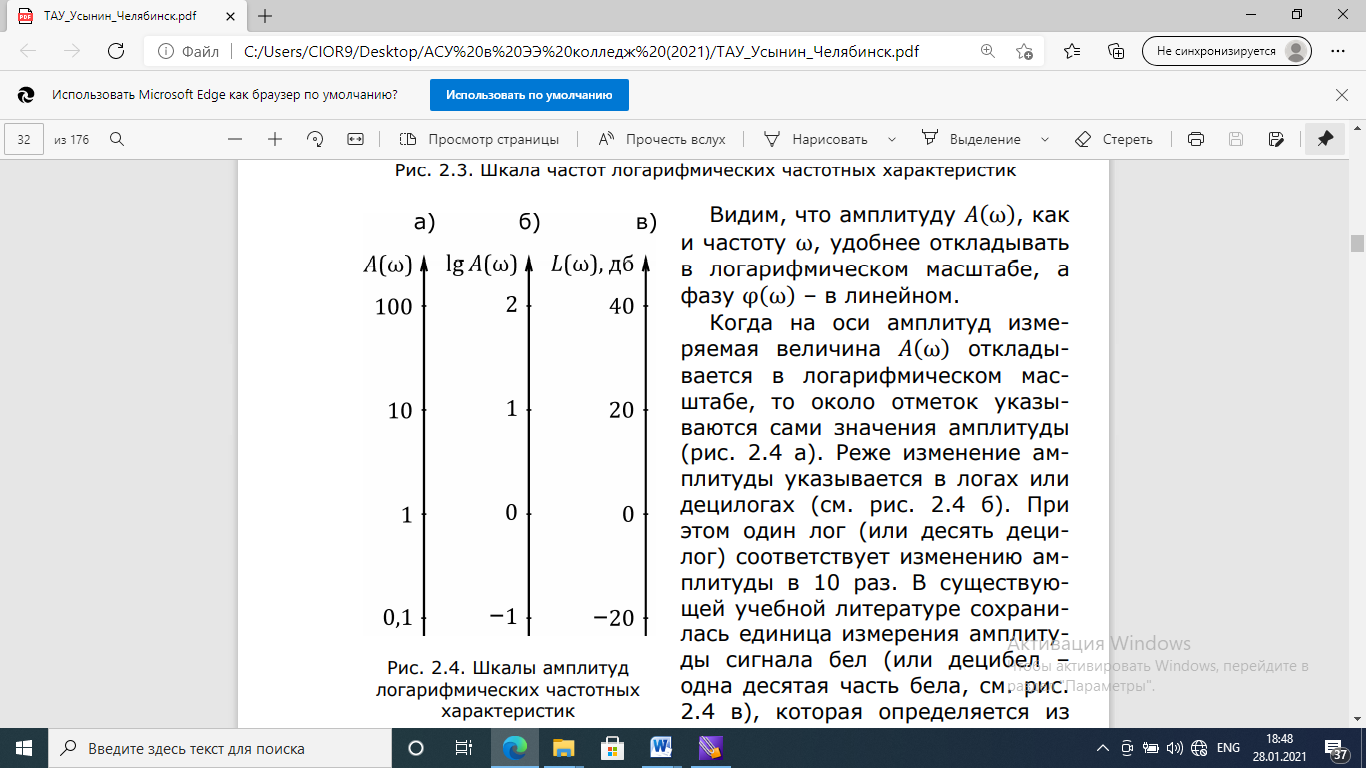
Рис. 4.6. Шкалы амплитуд логарифмических частотных характеристик
Амплитуду , как и частоту , удобнее откладывать в логарифмическом масштабе, а фазу – в линейном. Когда на оси амплитуд измеряемая величина откладывается в логарифмическом масштабе, то около отметок указываются сами значения амплитуды (рис. 4.6 а). Реже изменение амплитуды указывается в логах или децилогах (см. рис. 4.6 б). При этом один лог (или десять децилог) соответствует изменению амплитуды в 10 раз.
Единица измерения амплитуды сигнала бел (или децибел – одна десятая часть бела, см. рис. 4.6 в), которая определяется из соотношения:

Аппарат логарифмических частотных характеристик получил большое распространение при расчете систем автоматического регулирования, так как, во-первых, позволяет упростить расчеты (произведения величин заменяются суммой их логарифмов, Рис. 3.3. Шкала частот логарифмических частотных характеристик Рис. 3.4. Шкалы амплитуд логарифмических частотных характеристик степенные функции заменяются наклонными прямыми), а во вторых, и это главное, помогает выделить главный, доминирующий фактор в свойствах системы регулирования, обеспечивает наиболее ясную и простую связь частотной характеристики со структурой и параметрами системы регулирования.