

Уравнение пятого порядка

Из рассмотрения определителей следует, что если Δ2>0 и Δ4>0, то Δ3 тоже положителен и его нет надобности вычислять.
Для того чтобы система, описываемая дифференциальным уравнением пятого порядка, была устойчивой, необходимо и достаточно, чтобы все коэффициенты характеристического уравнения и определители Δ2 и Δ4 были положительными.
Дальше идёт пример, не думаю, что там нужен поиск по словам, а также там много формул, поэтому просто картинку вставлю.


Критерий устойчивости Рауса
Практически критерием Гурвица выгодно пользоваться при исследовании устойчивости САУ не выше пятого порядка, Для систем более высоких порядков удобнее применять критерии Рауса. Для этого необходимо составить таблицу – схему из коэффициентов характеристического уравнения (таблица–схема дана ниже).

В первую строку таблицы вписываются коэффициенты с чётными индексами, а во вторую — с нечётными. Все последующие строки получаются в результате деления разности перекрёстных произведений коэффициентов двух предыдущих строк на коэффициент первого столбца предыдущей строки.
Согласно критерию Рауса для устойчивости системы необходимо и достаточно, чтобы при a0>0 все коэффициенты первого столбца таблицы были положительны, т.е. чтобы a1>0, b1>0, …
Всего таблица содержит n+1 строку.
Критерий устойчивости Михайлова
Так же, как и критерий Гурвица, критерий А, В, Михайлова рассматривает характеристическое уравнение замкнутой системы. Выведем этот критерий. Разделим характеристическое уравнение системы (6.1) на коэффициент при высшей производной (при высшей степени p).
![]()
Это уравнение в общем случае имеет n комплексных корней
![]()
То есть мы можем разложить уравнение на множители:
![]()
Комплексное число может быть изображено на комплексной плоскости d, jω вектором, выходящим изначала координат (рис, 8-2).

Длина вектора равна модулю комплексного числа, а угол, образуемый вектором с положительным направлением вещественной оси, – его аргументу, если вектор записан в показательной форме pi=Ai·e jθ. Координаты точки, лежащей в конце вектора, дают возможность записать его в форме (8-7).
Множители (р-рi) выражения (8-8) представляют собой разность векторов, которая геометрически изображается вектором, проведённым из конца вычитаемого вектора рi к началу уменьшаемого р (рис. 8-3).

Так как вектор р – произвольное комплексное число, то оно может быть принято и чисто мнимым. Вектор, изображающий это число, совпадает с направлением мнимой оси. Множители, входящие в уравнение (8-8), будут иметь вид
![]()
При меняющейся величине ω разность (8-9) представляет семейство векторов, показанное на рисунке 8-4.
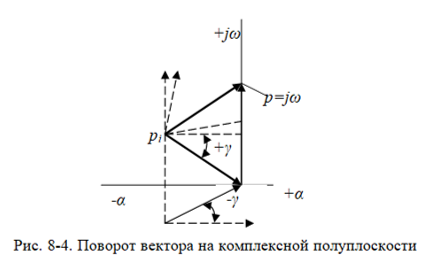
Проследим за поворотом вектора jω-pi при изменении ω от 0 до бесконечности. Начало этого вектора находится в неподвижной точке, соответствующей концу вектора pi. Конец вектора будет скользить по мнимой оси от 0 до +∞, а сам вектор будет поворачиваться вокруг конца вектора pi в ту или иную сторону в зависимости от того, по какую сторону от мнимой оси расположен вектор pi.
Если корень pi вещественный отрицательный, то вектор разности jω-pi при изменении ω от 0 до +∞ повернётся против часовой стрелки на угол +π/2.
Если корень pi вещественный положительный, то вектор разности при изменении ω от 0 до +∞ повернётся по часовой стрелке на угол -π/2.
При комплексных сопряжённых корнях с
отрицательной вещественной частью углы
поворота составят
 ,
при корнях с положительной вещественной
частью
,
при корнях с положительной вещественной
частью

Характеристическое уравнение (8-8) можно рассматривать как произведение векторов вида jω-pi, представляющие собой новый вектор, модуль которого равен произведению модулей векторов множителей, а аргумент – сумме аргументов векторов множителей. При изменении ω от 0 до +∞ угол поворота вектора произведения будет равен сумме углов поворота векторов множителей.
В устойчивой системе в характеристическом уравнении которой все вещественные части корней отрицательны и их n штук, суммарный угол поворота будет равен πn/2. В случае сопряжённых комплексных корней дополнительные углы +γ и -γ взаимно уничтожаются. В неустойчивой системе, в характеристическом уравнении которой содержатся отрицательные и положительные вещественные части корней, суммарный угол поворота вектора произведения меньше πn/2.
Чтобы получить наш критерий устойчивости – достаточно построить АФЧХ. Для этого надо сделать следующее. В наше характеристическое уравнение подставить p=jω, а затем отделить мнимую и действительную часть.

АФЧХ это график в координатах (P(ω), Q(ω)), поэтому подставляя значения ω от 0 до +∞ мы сможем построить график АФЧХ – эта характеристическая кривая называется годограф Михайлова. При изменении ω от 0 до +∞ вектор F(jω) будет перемещаться своим концом по годографу, поворачиваясь на некоторый угол.
В случае устойчивой системы, когда угол поворота вектора равен πn/2, годограф пройдёт через n квадрантов комплексной плоскости, не проходя через начало координат (рис. 8-5, кривая 1).
Если система неустойчива, то общий угол поворота будет меньше πn/2 и годограф не пройдёт через n квадрантов (рис. 8-5, кривая 2).

Формулировки критерия Михайлова:
Первая формулировка. Если при изменении частоты от нуля до бесконечности годограф Михайлова начинается на действительной оси в точке аn‚ последовательно проходит против часовой стрелки n квадрантов комплексной плоскости, не проходя через ноль, и уходит в бесконечность в n-м квадранте, – система устойчива.
Вторая формулировка. Если при изменении частоты от нуля до бесконечности вектор комплексного частотного полинома F(jω) последовательно поворачивается против часовой стрелки на угол πn/2‚ где n — степень характеристического полинома, и нигде не становится нулём, – система устойчива.
 Примеры годографов в зависимости от n.
Примеры годографов в зависимости от n.