

Связь между прямыми и частотными оценками качества
Непосредственная количественная
взаимная зависимость между временными
и частотными характеристиками даётся
преобразованиями Фурье. В устойчивой
системе связь частотной характеристики
с импульсной переходной (весовой)
функцией
 определяется прямым преобразованием
Фурье
определяется прямым преобразованием
Фурье
а импульсной переходной (весовой) функции с частотной характеристикой – обратным преобразованием Фурье:
На практике подробные расчёты по приведённым выражениям требуются далеко не всегда. Более продуктивны и часто вполне достаточны приближенные соотношения между показателями переходной функции и частотными характеристиками.
Рассмотрим сначала связи между переходными
функциями и ЛАЧХ для самых элементарных
систем первого, а затем второго порядка.
Эти случаи удобны для анализа, так как
процессы, протекающие в этих системах,
поддаются аналитическому решению в
рамках хорошо изученных линейных
дифференциальных уравнений первого
или второго порядка. Систему первого
порядка можно представить, как систему,
образованную интегрирующим звеном с
постоянной времени T
в прямом канале, охваченным единичной
отрицательной обратной связью (рис.
10.3 а). Частота среза представленной
системы (см. рис. 10.3 б)
 ωС,
переходная функция – это экспонента с
постоянной времени T
(см. рис. 10.3 в). Время регулирования через
частоту среза выражается следующим
образом:
ωС,
переходная функция – это экспонента с
постоянной времени T
(см. рис. 10.3 в). Время регулирования через
частоту среза выражается следующим
образом:
В реальной замкнутой системе высокого порядка, настроенной на монотонный характер протекания процесса регулирования, даже такая простая оценка длительности процессов вполне допустима.
Желаемые лачх системы автоматического управления
Любая система автоматического управления должна, во-первых, обеспечить точное воспроизведение выходной переменной входного сигнала (задача воспроизведения) и, во вторых, максимально ослабить влияние возмущений на регулируемую переменную (задача подавления возмущений).
Если предельно идеализировать задачу, то первая её часть требует, чтобы система автоматического управления обладала по сигналу задания передаточной функцией, тождественно равной единице:
 .
.
В этом случае выходной сигнал мгновенно и абсолютно точно воспроизводит входной сигнал. Например, при единичном скачке входного сигнала выходной сигнал также изменится скачком мгновенно и без всякого запаздывания.
Такой идеальной системе соответствует безынерционное звено, ЛАЧХ которого имеет равномерное усиление во всей полосе частот (рис. 10.3 б).
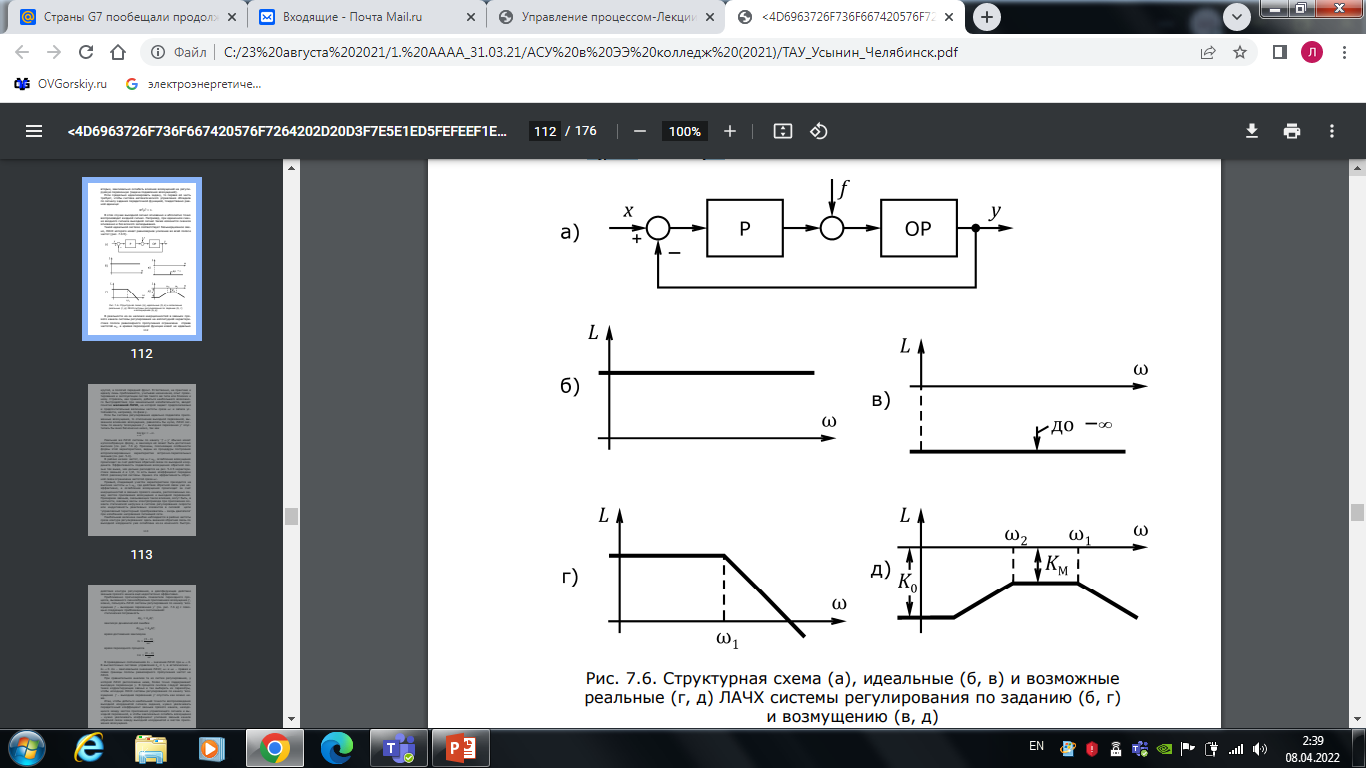
Рис. 10.3. Структурная схема (а), идеальные (б, в) и возможные реальные (г, д) ЛАЧХ системы регулирования по заданию (б, г) и возмущению (в, д)
В реальности из-за наличия инерционностей
в звеньях прямого канала системы
регулирования на амплитудной характеристике
полоса равномерного пропускания
ограничена справа частотой
 ,
а кривая переходной функции имеет не
идеально крутой, а пологий передний
фронт. Естественно, на практике к идеалу
лишь приближаются, учитывая назначение,
опыт проектирования и эксплуатации
систем такого же типа или близких к
нему. Стремясь, как правило, добиться
наибольшего возможного быстродействия
при минимальной колебательности, вводят
понятие желаемой ЛАЧХ, на которой
задают предполагаемые и предпочтительные
величины частоты среза
и
запаса устойчивости, например, по фазе
.
,
а кривая переходной функции имеет не
идеально крутой, а пологий передний
фронт. Естественно, на практике к идеалу
лишь приближаются, учитывая назначение,
опыт проектирования и эксплуатации
систем такого же типа или близких к
нему. Стремясь, как правило, добиться
наибольшего возможного быстродействия
при минимальной колебательности, вводят
понятие желаемой ЛАЧХ, на которой
задают предполагаемые и предпочтительные
величины частоты среза
и
запаса устойчивости, например, по фазе
.
Приближённо прогнозировать показатели
переходного процесса, вызванного
скачкообразным приложением возмущения
 ,
можно, пользуясь ЛАЧХ системы регулирования
по каналу «возмущение
– выходная переменная
»
(см. рис. 10.3 д) с помощью следующих
приближенных соотношений:
,
можно, пользуясь ЛАЧХ системы регулирования
по каналу «возмущение
– выходная переменная
»
(см. рис. 10.3 д) с помощью следующих
приближенных соотношений:
статическая погрешность
 ;
;
максимум динамической ошибки
 ;
;
время достижения максимума
 ;
;
время переходного процесса
 ;
;
В приведённых соотношениях
 –
значение ЛАЧХ при
–
значение ЛАЧХ при
 .
.
В высокоточных системах управления
 1,
в астатических –
1,
в астатических –
 .
.
 – максимальное значение ЛАЧХ;
– максимальное значение ЛАЧХ;
и
 – правая и левая границы полосы
равномерного пропускания частот на
ЛАЧХ.
– правая и левая границы полосы
равномерного пропускания частот на
ЛАЧХ.
При сравнительном анализе та из систем регулирования, у которой ЛАЧХ расположена ниже, более точно поддерживает выходную переменную y. В процессе синтеза следует вводить такие корректирующие звенья и так выбирать их параметры, чтобы исходную ЛАЧХ системы регулирования по каналу «возмущение f - выходная переменная y» опустить как можно ниже.
Итак, чтобы добиться наибольшей точности воспроизведения выходной координатой сигнала задания, нужно увеличивать передаточный коэффициент звеньев прямого канала, находящихся между местом приложения управляющего сигнала и выходной переменной, а чтобы максимально ослабить возмущение – нужно увеличивать коэффициент усиления звеньев канала обратной связи между выходной координатой и местом приложения возмущения.
На практике часто пользуются понятием желаемой ЛАЧХ системы регулирования. Однозначно для всех возможных случаев её задать нельзя. Обычно разработчик, учитывая свой опыт, возможности аналогичных систем, назначение и условия работы технологического механизма, формулирует совместно с заказчиком технические требования к системе управления, которые и являются основанием для указания основных признаков, определяющих вид желаемой ЛАЧХ.
Чаще всего на желаемой характеристике
задают
 – частоту среза системы как меру её
быстродействия;
– запас устойчивости по фазе,
характеризующий степень колебательности
системы; порядок астатизма как способ
достижения высокой точности в статике.
– частоту среза системы как меру её
быстродействия;
– запас устойчивости по фазе,
характеризующий степень колебательности
системы; порядок астатизма как способ
достижения высокой точности в статике.
Желаемая частотная характеристика дает приближенные ответы. В ответственных случаях расчеты обязательно дополняются компьютерным моделированием системы. Этому способствуют и наличие соответствующих отработанных программ расчета, и существующий разветвленный парк вычислительной техники. Еще ценнее на заключительном этапе экспериментальная проверка результатов на опытном образце или реальной установке. Однако нельзя забывать и нужно ценить, что приводимые ниже методы синтеза позволяют наиболее ясно обосновать рациональную структуру (тип обратных связей, вид и параметры передаточных функций корректирующих звеньев), сопоставить возможности различных корректирующих звеньев, предугадать направление поиска наилучшего решения, обосновать если не оптимум, то близость к оптимуму параметров корректирующих связей.
Если бы система регулирования идеально
подавляла приложенные возмущения, то
отклонение выходной переменной, вызванное
влиянием возмущения, равнялось бы нулю,
ЛАЧХ системы по каналу «возмущение
–
выходная переменная
 опустилась бы вниз бесконечно низко,
так как
опустилась бы вниз бесконечно низко,
так как
 .
.
Реальная же ЛАЧХ системы по каналу
 обычно имеет куполообразную форму, а
максимум её может быть достаточно
высоким (см. рис. 10.3 д). Причины, поясняющие
особенности формы этой характеристики,
видны из процедуры построения
аппроксимированных характеристик
встречно-параллельных звеньев.
обычно имеет куполообразную форму, а
максимум её может быть достаточно
высоким (см. рис. 10.3 д). Причины, поясняющие
особенности формы этой характеристики,
видны из процедуры построения
аппроксимированных характеристик
встречно-параллельных звеньев.