

Частотные характеристики
Частотные характеристики колебательного звена: 4.1. Амплитудно-фазовая частотная характеристика (рис. 5.4):


Рис. 5.4. Амплитудно-фазовая частотная характеристика колебательного звена второго порядка
С уменьшением ξ петля, очерченная годографом, увеличивается и
при & = 0 характеристика вырождается в две полупрямые:

Если экспериментально получен частотный годограф реального звена, близкого к колебательному, то параметры соответствующего колебательного звена могут быть найдены по точкам характеристики, лежащим на вещественной и мнимой осях.
4.2. Амплитудно-частотная характеристика (рис. 5.5, а):

4.3. Фазочастотная характеристика (рис. 3.40, 6):


Рис. 5.5. Частотные характеристики колебательного звена 2 порядка: а – амплитудная; б – фазовая
4.4. Логарифмическая амплитудно-частотная характеристика (рис. 5.6):
![]()
4.4.1. Асимптотические логарифмические характеристики
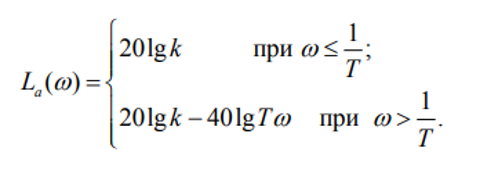
Рис. 5.6. Логарифмическая амплитудно-частотная характеристика колебательного звена 2 порядка
Вблизи точки резонанса ЛАЧХ сильно
зависит от степени затухания
 .
С удалением от резонансной частоты
характеристика практически перестаёт
зависеть от
.
Поправка к асимптотической характеристике
δ(ω) = L(ω) – La(ω) зависит от степени
затухания
.
С удалением от резонансной частоты
характеристика практически перестаёт
зависеть от
.
Поправка к асимптотической характеристике
δ(ω) = L(ω) – La(ω) зависит от степени
затухания


Основные правила составления и преобразования структурных схем
При исследовании и расчёте систем автоматического управления исходят из математического описания происходящих в них физических процессов. Обычно это описание бывает представлено в виде системы дифференциальных уравнений, выражающих связи между переменными величинами и их производными. Такой подход, когда уравнения описывают поведение исследуемой системы в целом, является наиболее общим в математическом плане и применимым во всех случаях.
Вместе с тем для большого класса систем автоматического управления (линейных систем) широко применяется и другой способ, связанный с использованием операторного метода. При этом способе исследуемая система разделяется на части – звенья направленного действия, обладающие свойством передачи сигнала только в одном направлении: от входа к выходу. Совокупность этих звеньев совместно с линями связи между ними, характеризующими их взаимодействие, образует структурную схему системы управления.
Таблица.7.1. Элементы структурных схем
Между функциональными и структурными схемами есть определенная общность – те и другие отражают процесс передачи и переработки информации в замкнутом контуре системы управления. Однако между ними существует и чёткое различие: функциональные схемы характеризуют систему по составу входящих в неё элементов, рассматриваемых с точки зрения их назначения, т.е. выполняемых ими функций; структурные схемы состоящие из звеньев направленного действия, описывают математически динамические свойства системы.
Передаточная функция каждого звена направленного действия представляет собой записанное в операторной форме и разрешённое относительно изображения выходной величины дифференциальное уравнение данного звена. Таким образом, задача составления дифференциальных уравнений системы автоматического управления в целом сводится к составлению уравнений отдельных звеньев. Получаемый при этом выигрыш в части трудоёмкости становится более очевидным, так как на практике в подавляющем большинстве случаев структурные схемы систем автоматического управления представляют собой различные комбинации небольшого числа так называемых типовых звеньев направленного действия, передаточные функции и динамические свойства, которых могут быть определены раз и навсегда.

Рис. 7.1. Система направленного действия
Весьма важным преимуществом структурных схем является их физическая наглядность, дающая более ясное представление о процессах, происходящих в исследуемой системе, по сравнению с общей формой записи дифференциальных уравнений.
После того, как составлена структурная схема и получены передаточные функции входящих в нее звеньев, необходимо определить передаточную функцию всей системы. При этом, если для разделения систем управления на звенья направленного действия нельзя дать какого то единого рецепта, а приходится каждый раз руководствоваться в значительной мере соображениями общего порядка и интуицией, приобретаемыми в процессе накопления опыта и выполнения специальных упражнений, то для определения передаточной функции системы по её структурной схеме можно воспользоваться специальными правилами преобразования структурных схем, основные из которых приводятся ниже.
Рассмотрим разомкнутую систему, обладающую свойством направленного действия (рис.7.1) это может быть как одно звено, так и любая их комбинация.
По определению передаточной функции

откуда следует основное свойство направленной системы
![]()
т.е. операторное изображение выходной величины равняется передаточной функции системы, умноженной на изображение входной величины.

Рис.7.2. Последовательное включение звеньев направленного действия.

2. Параллельное согласное включение. Параллельным согласным включением звеньев направленного действия считается такое, при котором входная величина системы подаётся параллельно на входе всех звеньев, а их выходные величины алгебраически суммируются на выходе системы.
На рис.7.3. изображён частный случай параллельного согласного включения трех звеньев направленного действия.

Рис.7.3. Параллельное согласное включение звеньев направленного действия
На основании формулы (7.2) для каждого из n параллельно включенных звеньев можно записать:
Суммируя написанные равенства и принимая их во внимание, что по определению параллельного согласного включения звеньев направленного действия сумма левых частей является выходной величиной системы, получим

Согласно определению передаточной функции (4.1), из последнего выражения будем иметь

Таким образом, передаточная функция параллельных согласно включенных звеньев направленного действия равняется алгебраической сумме передаточных функций отдельных звеньев.
3. Параллельное встречное включение (обратная связь). Рассмотрим сначала основной случай – отрицательную обратную связь.
На рис. 7.4. изображена структурная схема замкнутый системы автоматического управления в наиболее общем виде, где G (p) и Z(p)- передаточные функции соответственно прямой цепи системы и цепи обратной связи.

Рис.7.4. Параллельное встречное включенье звеньев направленного действия (обратная связь).
Сигнал обратной связи Хо.с.(р) вычитается из входного сигнала Хвх (р) (в случае положительной обратной связи они не вычитаются, а складываются). Передаточные функции G(р) и 2(р) могут соответствовать как простым звеньям направленного действия, так и их любым комбинациям.
Для схемы, изображённой на рис.7.4,

Исключив из них промежуточную величину Хо.с. получим передаточную функцию замкнутой системы

Где
![]()
есть передаточная функция разомкнутой системы. Смысл последнего названия становится понятным, если мысленно разомкнуть контур управления в любом месте и, «выпрямив» его, рассматривать прохождение сигнала, поданного в месте размыкания, по цепочке последовательно включенных звеньев направленного действия.
Итак, передаточная функция замкнутой системы автоматического управления равняется отношению передаточной функции прямой цепи к увеличенной на единицу передаточной функции разомкнутой системы.
Следует отметить, что этот вывод, равно как и формула (7.5), справедливы только для изображённого на рис.7.4 случая, когда внешнее воздействие поступает вход системы управления. Поэтому Ф(р) иногда называют передаточной функцией замкнутой системы по входному воздействию.
В действительности, кроме управляющего входного воздействия, всякая реальная система подвержена различным возмущающим воздействиям (колебания нагрузки, нестабильность характеристик элементов, помехи и т.д.), которые могут поступать в систему в любом месте. Для учёта их влияния нужно уметь при помощи структурной схемы устанавливать зависимости между этими возмущениями и изменениями управляемой (выходной) величины системы.
Рассмотрим структурную схему системы автоматического управления, изображённую на рис. 7.5. Прямая цепь системы состоит из последовательно включенных звеньев направленного действия с передаточными функциями G1(p), G2(p), G3(p). На входы двух последних звеньев поступают возмущающие воздействия F1(p) и F2(p), суммирующиеся с соответствующими выходными величинами предыдущих звеньев. Кроме того, возмущение F3(p) действует непосредственно на выходную величину системы, что обозначено на схеме специальным элементом суммирования. При этом принципиально важно, что место приложения возмущения F3(p) охвачено обратной связью, т.е. на звено с передаточной функцией Z(p) поступает выходная величина системы уже с учётом действия F3(p). В противном случае никакого эффекта регулирования не было бы, так как управляемая величина системы, искажённая влиянием возмущающего действия, не корректировалась бы обратной связью.

Рис.4.5. Структурная схема системы автоматического управления
Из структурной схемы (рис.7.5) видно, что возмущающие воздействия F2 (p), F3(p) поступают на входы звеньев прямой цепи системы не непосредственно, а через дополнительные звенья с передаточными функциями Gf2(p), Gf3 (p), которые отражают характер зависимости данной величины системы от конкретного возмущающего действия.
В силу линейности рассматриваемой системы управления к ней применим принцип наложения, дающий возможность определить общую реакцию системы (изменение выходной величины) как сумму частных реакций от каждого из внешних воздействий в отдельности.
Положим Xвх (р)=0, F2 (p)=0, F3 (p)=0 и определим зависимость Хвых (р) от F1 (p).

Полученный результат можно обобщить в виде следующего правила: операторное изображение выходной величины системы равняется дроби, числитель которой есть произведение изображения внешнего воздействия на передаточные функции звеньев, включенных последовательно между точкой приложения воздействия и выходом системы, а знаменатель – увеличенная на единицу передаточная функция разомкнутой системы.
Аналогичным путём получим выражения и для остальных внешних воздействий:
При одновременном воздействии всех возмущений результирующие значение Хвых(р) определится как сумма полученных значений, что может быть записано следующим образом:

Из выражения (7.5) можно получить (как частный случай) формулы, характерные для следящих систем. Особенностью последних является передача выходной величины Θвых к элементу сравнения, т.е. на вход системы, с коэффициентом передачи, равным единице. Кроме того, основным видом внешних воздействий в следящих системах обычно считают входное (управляющее) воздействие Θвх, отрабатываемое системой с некоторой ошибкой (рассогласованием)
Θ = Θвх - Θвых
С учётом сказанного, положив в (7.6) Z(p)=1, будем иметь W(p)=G(p), после чего, заменив в (7.5) обозначения входной и выходной величин, получим


Рис. 7.6. Структурная схема следящей системы
Соответствующая структурная схема следящей системы приведена на рис.7. В силу линейности преобразований Лапласа, операторные изображения ошибки, входной и выходной величин связаны между собой так же, как и их оригиналы, т.е.

Выражения (7.12) и (7.14) называются соответственно передаточными функциями следящей системы по выходной величине и по ошибке. Во всех рассмотренных случаях передаточные функции замкнутых систем управления определялись через передаточную функцию разомкнутой системы W(p). Последняя обычно может быть представлена в виде

Подставив (7.15) в выражения (7.12) и (7.14), можно получить полезные для расчетов следящих систем формулы:

Выше рассматривались отрицательная обратная связь. Студентам предлагается а порядке упражнений самостоятельно убедиться. что в случае положительной обратной связи в знаменателе формул (7.5). (7.77.12), (7.14) знак плюс перед № (р) изменяется на минус. Преобразование многоконтурных структурных схем с перекрещивающимися связями производят по способу (перенесения) связей, сущность которого поясняется на примере ниже.