

32.2. Постоянные муфты
Постоянные муфты делятся на глухие и подвижные (компенсирующие), которые допускают небольшие неточности сборки.
Глухая втулочная муфта (рис. 29.2) является наиболее простой и используется при высокой соосности соединяемых валов и отсутствии перекоса. Она состоит из втулки, соединенной с валами с помощью штифтов (рис. 29.2, а), шпонок (рис. 12.2, б), а при больших моментах– с помощью шлицевых соединений.
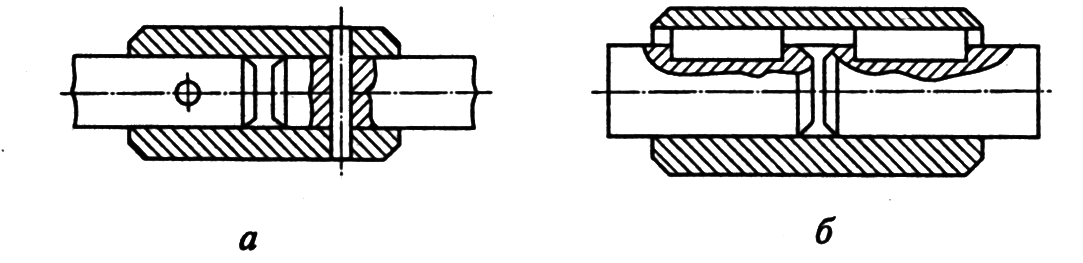
Рис. 32.141
Втулки изготавливают из различных материалов, но чаще из сталей тех же марок, что и валы.
Расчет втулочных муфт сводится к расчету штифтов (шпонок) на сдвиг. Размеры втулочных муфт стандартизированы.
Компенсирующие поводковые муфты различных конструкций (рис. 29.3, 29.4) применяют при диаметрах валов 3... 12 мм. Они допускают небольшие радиальные смещения осей валов. Муфты состоят из полумуфт 1 и 2, закрепленных на валах штифтами. На фланце одной из полумуфт закреплен палец 3, входящий в паз второй полумуфты. Палец может быть цилиндрическим и сферическим, последний допускает и перекос осей. Муфта, показанная на рис. 29.3, проста по конструкции, но у нее всегда существует мертвый ход за счет зазора А между пальцем и пазом. При расстоянии г между осями вала и пальца величина мертвого хода (в угловых минутах)
Она состоит из двух полумуфт 3, 5, закрепленных на валах. В каждой полумуфте закреплено симметрично относительно оси по два цилиндрических пальца (поводка) 1, 4. Между полумуфтами находится упругий элемент 2 из твердой резины, кожи с четырьмя расположенными равномерно по окружности отверстиями, в которые входят пальцы полумуфт. При работе муфты упругий элемент деформируется, амортизирует динамические нагрузки и компенсирует погрешности расположения осей валов. Недостатком муфты является наличие мертвого хода из-за деформации упругого элемента и зазора между пальцем и упругим элементом.
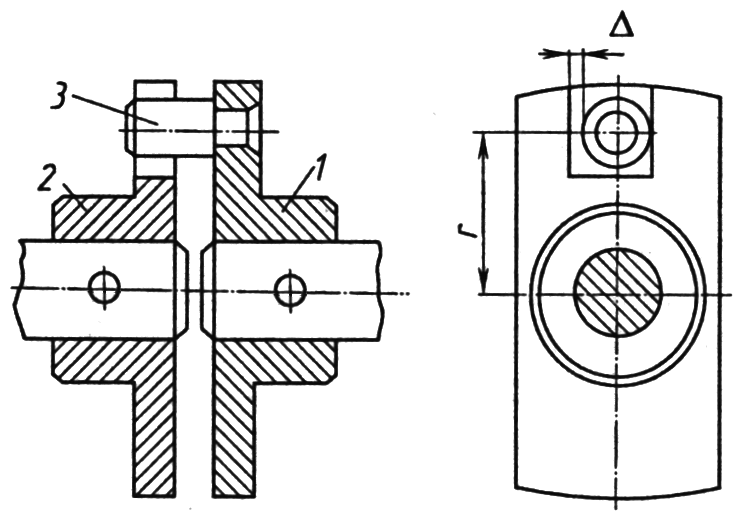
Рис. 32.142
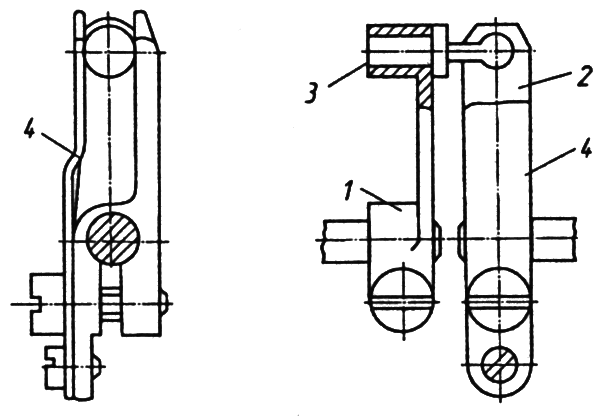
Рис. 32.143
Упругая поводковая муфта показана на рис. 29.5.
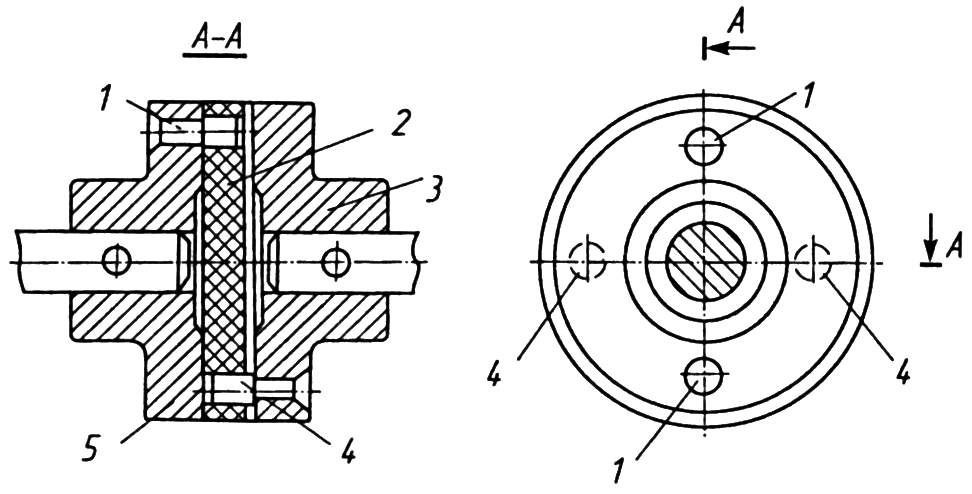
Рис. 32.144
Упругая мембранная муфта (рис. 29.6) позволяет передавать вращение между валами, имеющими радиальное смещение и перекос осей соответственно до ±0,7 мм и 2º30.
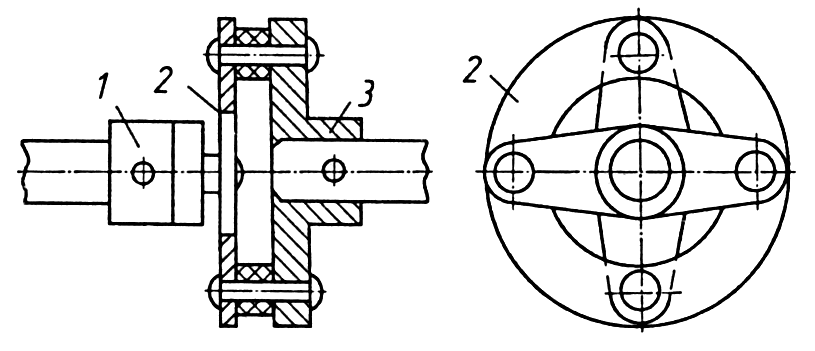
Рис. 32.145
Размеры упругих поводковых и мембранных муфт для валов диаметром 4...5 мм стандартизированы.
32.3.Управляемые муфты
С помощью управляемых, называемых также сцепными, муфт можно в процессе работы соединять и разъединять валы.
Муфты с ручным управлением в дистанционно управляемых системах, системах автоматики, различных приводах периферийных устройств ЭВМ практически не применяются. Вместо них используют муфты, управляемые дистанционно с помощью электрических сигналов малой мощности.
Из управляемых сцепных муфт наиболее широко применяются электромагнитные фрикционные и порошковые, обладающие высоким быстродействием и позволяющие регулировать передаваемый момент. Они используются также в качестве предохранительных и тормозных устройств.
Управление электромагнитом кулачковых (зубчатых) муфт связано с рядом трудностей, обусловленных плавным сцеплением и расцеплением полумуфт, что возможно только при равенстве их угловых
Принципиальные схемы фрикционных муфт показаны на рис.12.7.
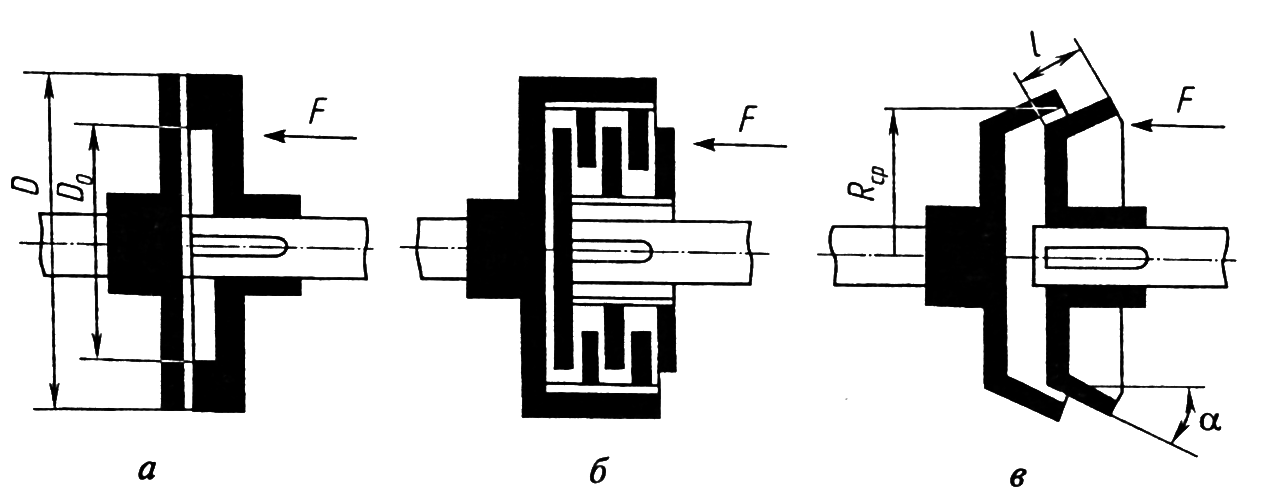
Рис. 32.146
В зависимости от формы рабочих поверхностей фрикционные муфты делятся на однодисковые (рис.29.7, а), многодисковые (рис. 29.7, б) и конусные (рис. 29.7, в).
Многодисковые муфты получили наибольшее распространение благодаря плавности включения, небольшим габаритам при передаче больших моментов. Оптимальное число дисков 6 – 10.
В конусных муфтах (рис. 29.7, в) угол α не должен быть меньше угла трения для предотвращения заклинивания и облегчения расцепления; для металлических поверхностей α > 8…15˚.
Для повышения коэффициента трения рабочие диски изготавливают из фрикционных материалов на основе металлических порошков.
Сила прижатия дисков или конусов создается встроенным в левую полумуфту электромагнитом.