

25.3.Расчет основных геометрических параметров цилиндрических прямозубых колес
Эвольвентное зацепление двух зубчатых колес характеризуется следующим параметрами (рис. 25.1).
Начальные окружности (dw1 и dw2) – воображаемые окружности, которые в процессе работы передачи перекатываются одна по другой без скольжения. Начальные окружности появляются у зубчатых колес в собранной передаче. Для отдельно взятого колеса понятие начальной окружности отсутствует. Оно имеет делительную окружность.
Делительная окружность (d1 и d2) – окружность зубчатого колеса, по которой обкатывается делительная окружность (прямая) инструмента в процессе нарезания зубьев. Делительная окружность колеса является начальной только в процессе изготовления (нарезания) зубьев. У некорригированных колес и при высотной коррекции начальные и делительные окружности совпадают.
![]()
Окружность вершин зубьев (dα) – окружность ограничивающая головки зубьев.
![]()
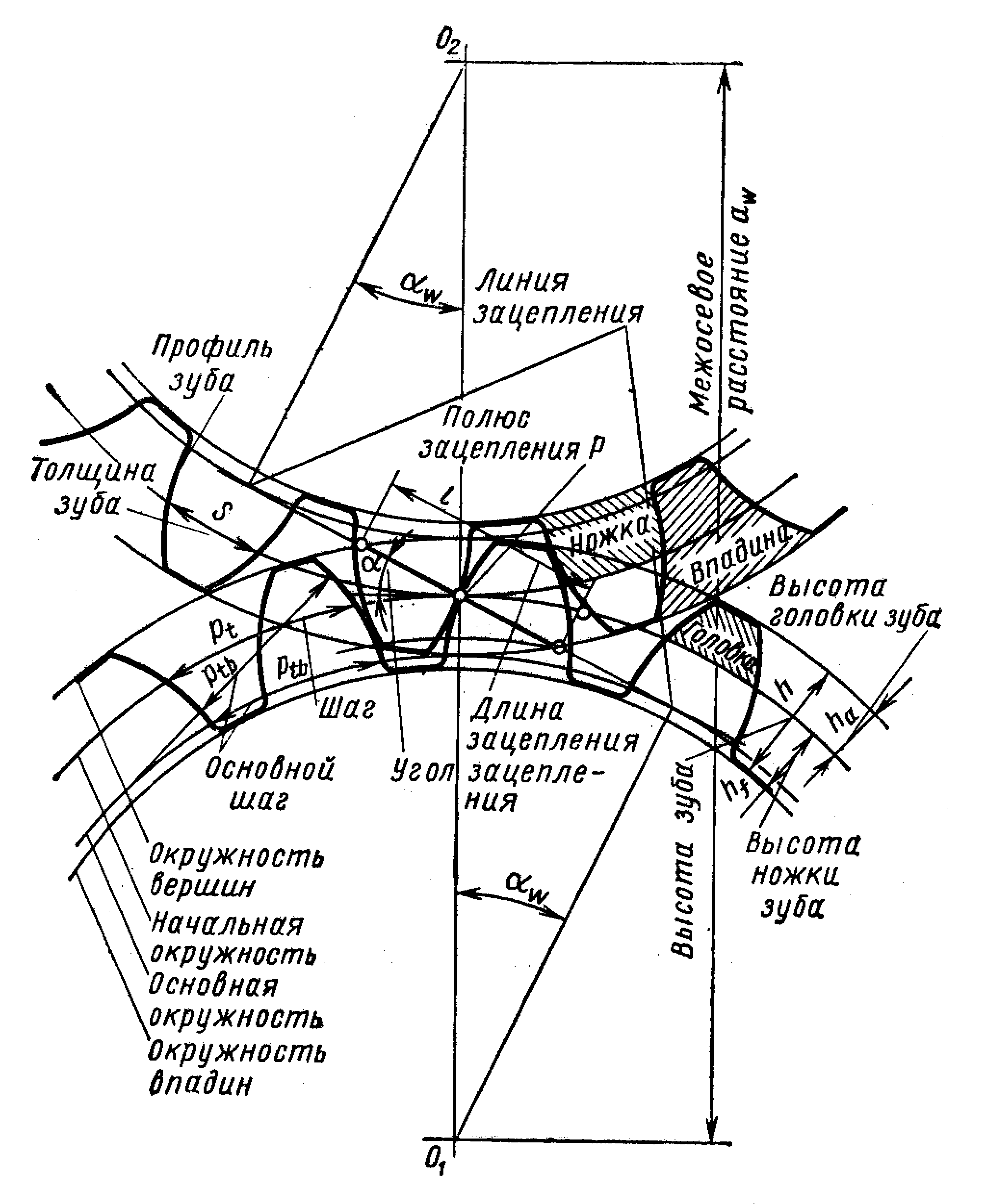
Рис. 25.126. Элементы зубчатого зацепления
Окружность впадин (df) – окружность, проходящая через основания впадин зубьев.
![]()
Основная окружность (db1 и db2) – окружность, при развертке которой получается эвольвента.
Полюс зацепления (точка “P”) – точка касания начальных окружностей.
Окружной шаг зацепления (Pt) – расстояние между одноименными профилями, измеренное по дуге делительной окружности, зубчатого колеса.
Головка зуба (hα) – часть зуба между делительной окружностью зубчатого колеса и его окружностью вершин зубьев.
![]()
Ножка зуба (hf) – часть зуба между делительной окружностью и его окружностью впадин.
![]()
Высота зуба (h) равна сумме высот головки и ножки зуба.
![]()
Линия зацепления (N1 и N2) – линия, по которой перемещается точка касания зубьев. Линия зацепления проходит через полюс зацепления и является касательной к основным окружностям.
Угол зацепления (αw) – угол между линией зацепления и касательной к начальным окружностям в полюсе зацепления.
Модуль зацепления (m). Все модули стандартизованы в пределах от 0,05 мм до 100 мм.
![]()
25.4.Расчет зубьев цилиндрических прямозубых зубчатых колес на изгиб
- для обозначения расчета на изгиб, который проводится по ножке зуба принят индекс F (от термина ножка – Fut – на английском и немецком языках).
- для обозначений расчета на контактную прочность принят индекс H, в честь автора теории расчетов контактных напряжений Г. Герца.
Расчет ведется по расчетной окружной силе (q), отнесенной к единице ширины венца.
![]()
где: P – передаваемое окружное усилие;
b – ширина венца зубчатого колеса (длина зуба);
K – коэффициент нагрузки, учитывающий дополнительные вредные явления (удары).
q – расчетная окружная сила, отнесенная к единице ширины венца (b).
Нормальная удельная сила равна:
![]()
Перенесем силу давления qn вдоль линии ее действия (линия зацепления) в точку, расположенную на оси симметрии зуба (рис. 25.2) и разложим на две составляющие: изгибающую зуб (qncosαn), вызывающую в опасном сечении напряжения изгиба (σu) и сжимающую зуб (qnsinα), вызывающую в зубе напряжения сжатия (σcж). Угол “α ” несколько больше угла профиля «αw» (γ = αw = 20˚).
Номинальное напряжение в опасном сечении:
![]() ;
;
![]() ;
;
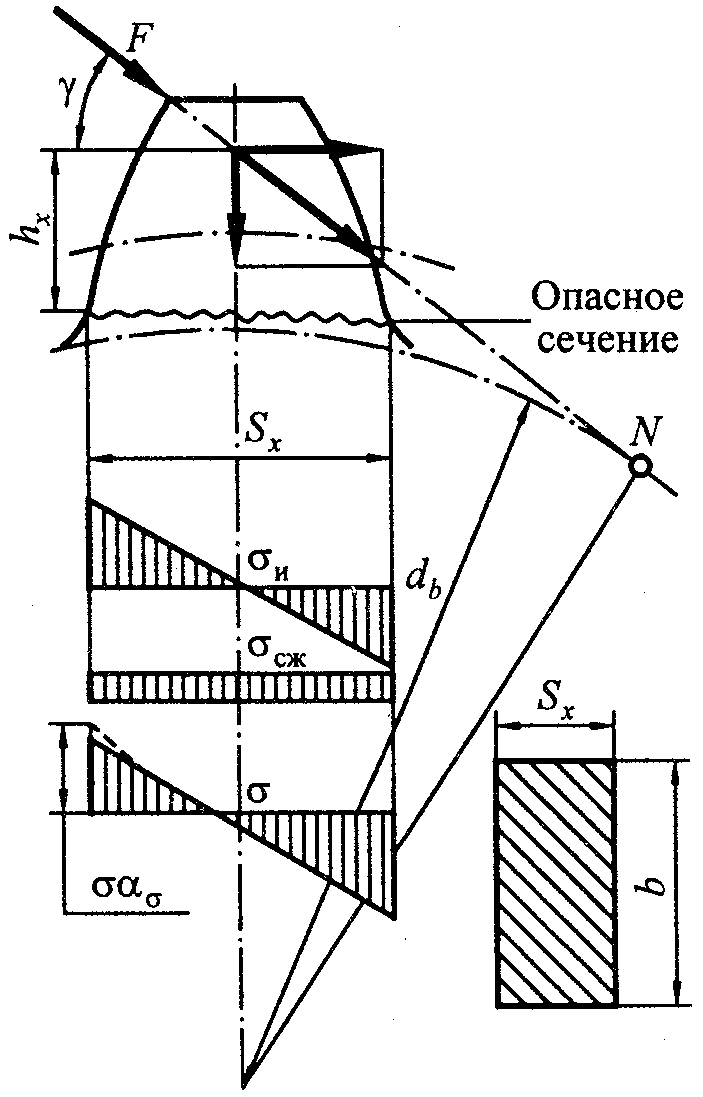
Рис. 25.127. Схема расчета зубьев на изгиб
![]() ;
;
![]() ;
;
тогда:
![]() ;
;
![]() ;
;
![]() .
.
Умножим числитель и знаменатель на модуль “m” и заменим получим:
![]() ,
,
![]() ,
,
![]() ;
;
приняв: ![]() ;
;
получим: ![]() .
.
Местные напряжения:
![]() ;
;
![]()
обозначив: ![]()
получим: ![]() ,
,
где: KT – теоретический коэффициент концентрации напряжений;
YFHU, YF – коэффициенты прочности зубьев соответственно по номинальным и местным напряжениям;
YFH – представляет собой номинальное напряжение в опасном сечении зуба при m = 1 и q = 1, а YF – местное напряжение при тех же условиях.
Технические расчеты удобно вести по формулам, в которых условия нагружения заданы в форме номинальных крутящих моментов М (ктс.см) или мощности (кВт), частоты вращения n (об/мин) и коэффициента нагрузки K.
![]() ;
;
Для технических проверочных расчетов следует умножить P и K и приняв
![]()
получим:
![]() ;
;
если ![]()
то:
![]() .
.
Модуль
и ширина зубчатого венца, прежде всего,
определяют прочность зуба на изгиб.
Приняв
![]() и решив последнее уравнение относительно
модуля, после преобразований получим:
и решив последнее уравнение относительно
модуля, после преобразований получим:
![]() .
.
Наиболее рациональной формой расчет, обеспечивающей равнопрочностъ зубьев по выкрашиванию и излому, является определение модуля по известному межосевому расстоянию “aw” и ширине зубчатого венца “b” полученным из расчета на конкретную прочность.
Подставим:
![]() .
.
После преобразования получим:
![]() ,
,
Откуда:
![]() .
.
Для большинства редукторов общего назначения:
![]() ;
;
коэффициент нагрузки К можно выразить:
![]() ,
,
здесь: Kβ – коэффициент концентрации нагрузки;
Kv – коэффициент динамичности нагрузки.