

20.1.2.Геометрические элементы зубчатых колес
Геометрия зубчатого колеса зависит в первую очередь от размеров и формы инструмента. Поэтому стандартизация параметров инструмента, воспроизводящего эвольвентный профиль зубчатого колеса, необходима с технической и экономической точек зрения. За основу стандарта форм и размеров зубчатого колеса принят теоретический исходный контур (ТИК, рис. 18.5).
Рис. 20.105
Размеры теоретического исходного контура установлены государственным стандартом. Базовая линия теоретического исходного контура, по которой толщина зуба равна ширине впадины, называется его делительной прямой. Расстояние между одноименными профилями соседних зубьев по делительной или по любой другой параллельной ей прямой называют шагом зубьев р исходного контура.
Если форма инструмента повторяет форму ТИК, а делительная прямая является начальной прямой, то начальная окружность нарезаемого колеса касается делительной прямой ТИК. Как уже отмечалось ранее, подвижные центроиды катятся друг по другу без скольжения, поэтому шаг зубьев по начальной окружности колеса должен быть равен шагу зубьев ТИК. Если z – число зубьев нарезаемого колеса, то длина окружности – подвижной центроиды колеса равна:
![]() , (18.10)
, (18.10)
где d – диаметр подвижной центроиды колеса:
![]() . (18.11)
. (18.11)
Подвижную центроиду колеса при его зацеплении с рейкой называют делительной окружностью. Делительная окружность делит зуб на делительную головку и делительную ножку. В выражении (18.11) введен основной параметр зубчатого зацепления – модуль m:
![]() . (18.12)
. (18.12)
Модуль измеряется в миллиметрах и может принимать только значения, оговоренные государственным стандартом. В долях модуля задаются все линейные размеры контура: высота делительной головки
![]() , (18.13)
, (18.13)
высота делительной ножки
![]() , (18.14)
, (18.14)
радиус переходной кривой
![]() , (18.15)
, (18.15)
где
![]() – коэффициент высоты головки; с*
– коэффициент радиального зазора;
– коэффициент высоты головки; с*
– коэффициент радиального зазора;
![]() – коэффициент радиуса переходной
кривой.
– коэффициент радиуса переходной
кривой.
Угол a между главным профилем зуба (прямая линия бокового профиля зуба является вырожденной эвольвентой окружности при rb ® ¥) и осью симметрии зуба называется углом профиля исходного контура. Государственный стандарт устанавливает следующие значения параметров исходного контура:
![]() .
.
Исходным производящим контуром называется такой, который заполняет впадины теоретического исходного контура, как отливка заполняет форму (рис. 18.5, ИПК). При этом между прямой вершин теоретического исходного контура и прямой впадин исходного производящего контура сохраняется радиальный зазор с*m. Это делается для того, чтобы поверхность впадин инструмента, образованного на базе исходного производящего контура, не участвовала в процессе нарезания зубьев.
21.Кулачковые механизмы
21.1.Виды кулачковых механизмов
Во многих отраслях техники получили широкое распространение кулачковые механизмы. Принципиальная схема кулачкового механизма показана на рис. 19.1.
Кулачок 1 вращается относительно оси О; ролик 2 соприкасается с поверхностью кулачка и приводит в движение толкатель 3, который имеет направляющую 4.
В приборах с небольшими нагрузками применяют остроконечный толкатель без ролика. Кроме прямолинейно движущегося толкателя выходным звеном может быть коромысло О1А (рис. 19.2), которое вращается относительно закрепленной на стойке точки. Непрерывный контакт ролика с профилем кулачка может быть обеспечен внешней силой (пружиной и др.), приложенной к толкателю – силовое замыкание. Геометрическое замыкание обеспечивается выполнением в кулачке паза, в котором движется ролик.
Кулачковые механизмы используются и как управляющие механизмы (например, управляющие работой клапанов), и как силовые, создающие крутящий момент на валу кулака (например, кулачковые разгружатели возмущающего момента). Основными входными параметрами синтеза являются функция положения толкателя или создаваемый кулачковым разгружателем крутящий момент; дополнительными параметрами синтеза – максимально допустимый угол давления в высшей кинематической паре [α] или минимально допустимый радиус кривизны профиля кулака ρmin. Выходными параметрами синтеза являются размеры кулачкового механизма и координаты профиля кулака.
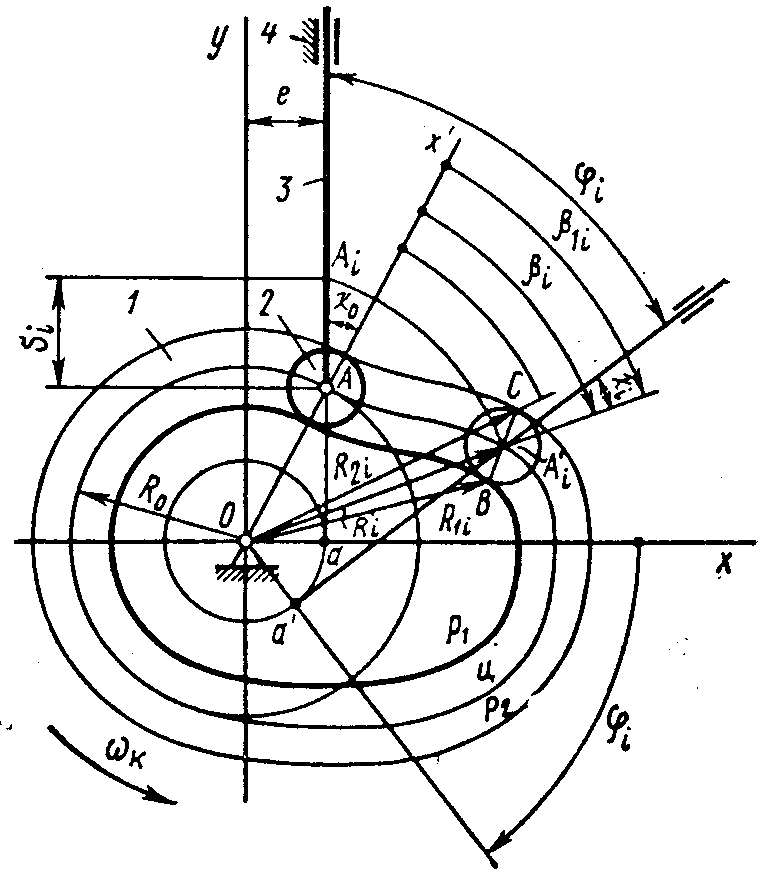
Рис. 21.106
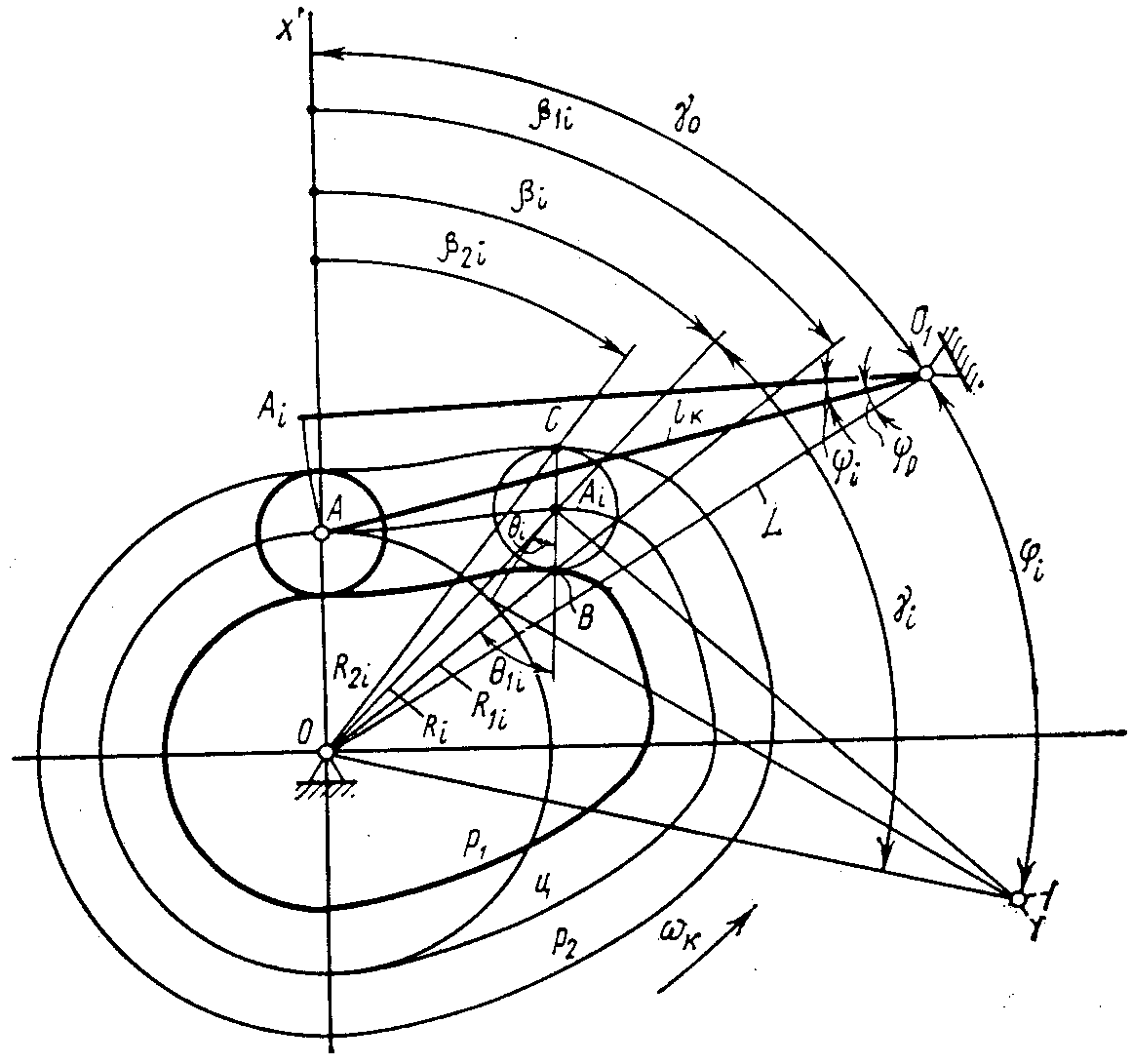
Рис. 21.107