

Бурлака, Кучеренко, Мазоренко, Тищенко, Основы теории механизмов и машин
.pdf130 Лекция 7
элементарных сил будет симметричной относительно этого сечения.
Если M05 0, но b M05 R05 l , то реакция R05 будет приложена в пределах опорной поверхности ползуна 5 (рис.4.8,а), а эпюра элементарных сил носит несимметричный характер.
R05 l , то реакция R05 будет приложена в пределах опорной поверхности ползуна 5 (рис.4.8,а), а эпюра элементарных сил носит несимметричный характер.
В случае если b > l , реакция R05 должна быть
приложена за пределами опорной поверхности ползуна 5, что невозможно. В этом случае к ползуну приложена уже не одна, а две направленные навстречу друг другу неизвестные по модулю реакции R05 и R05 (рис.4.8,в).
Именно эти две реакции и представляют реальное силовое воздействие на ползун со стороны направляющих, а сила R05 является лишь их равнодействующей:
R05 R05 R05.
Такое воздействие на ползун вызывает его перекос, в результате чего при определенных условиях возможно заклинивание ползуна. (Более подробно вопрос самозаклинивания будет рассмотрен в разделе 6).
3.4. Статическая определимость кинематической цепи
Число неизвестных, определяемых из какой-либо системы уравнений, должно совпадать с числом уравнений. Поэтому, прежде чем решать задачу об определении реакций в кинематических парах, надо выяснить для каких кинематических цепей соблюдается
условие равенства уравнений кинетостатики и числа неизвестных составляющих реакций в кинематических парах (условие статической определимости кинематической цепи).

Раздел 4. Силовой анализ механизмов |
131 |
Так как для каждого звена, совершающего плоское движение под действием приложенных сил, можно написать три уравнения равновесия этих сил (плоская система сил, находящаяся в равновесии):
Fkx 0; Fky 0; m0 Fk 0,
то число уравнений, которое можно составить при n звеньях равно 3n.
Предположим, что в состав кинематической цепи входят только кинематические пары V класса. Реакция каждой такой пары содержит две неизвестные величины: вращательная – две составляющие силы, поступательная – силу и момент. Таким образом, число неизвестных, которые необходимо определить, будет равно 2P5 , где P5 – число кинематических пар V класса.
Следовательно, кинематическая цепь будет статически определима, если удовлетворяется условие:
3n 2P5, или |
3n 2P5 0, |
т.е. соотношение между числом звеньев n и числом кинематических пар V класса равно:
3
P5 2n.
Но это соотношение соответствует структурной формуле группы Ассура.
Таким образом, группа Ассура является статически определимой кинематической цепью.
Поэтому наиболее рациональным является определение реакций в кинематических парах плоских механизмов по группам Ассура.

132Лекция 7
3.5.Последовательность силового анализа механизма
При силовом анализе механизма II класса желательно придерживаться следующего порядка.
1.Определяются все внешние силы, приложенные
кзвеньям механизма, от действия которых требуется найти реакции в кинематических парах механизма.
2. Выбирается начальное звено механизма и производится расчленение ведомой кинематической цепи механизма на группы Ассура.
3.Проводится силовой анализ каждой группы Ассура в отдельности исходя из того, что группа Ассура является статически определимой кинематической цепью. Расчет начинают с последней, считая от начального звена, присоединенной группы Ассура и заканчивают силовым расчетом начального звена.
4.Порядок силового анализа каждой группы Ассура II класса зависит от ее вида.
Так, при расчете групп 1, 2 и 4 вида, внутренняя кинематическая пара которых вращательная, сначала составляют уравнения моментов для каждого звена группы в отдельности относительно внутренней кинематической пары, а затем составляют уравнения векторной суммы сил, действующих на группу в целом и на одно из звеньев.
При расчете групп Ассура 3 и 5 вида, внутренняя кинематическая пара которых поступательная, рассматривают равновесие каждого звена в отдельности, сначала второго звена группы, а потом первого. Для второго звена составляют уравнение моментов относительно точки приложения реакции от стойки на рассматриваемое звено и уравнение векторной суммы сил, а для первого звена – только уравнение векторной суммы сил.

Раздел 4. Силовой анализ механизмов |
133 |
|
|
|
|
ЛЕКЦИЯ 8
СОДЕРЖАНИЕ
4.7.Силовой анализ группы Ассура II класса 1 вида
4.8.Силовой анализ группы Ассура II класса 2 вида
4.7.Силовой анализ группы Ассура II класса 1
вида
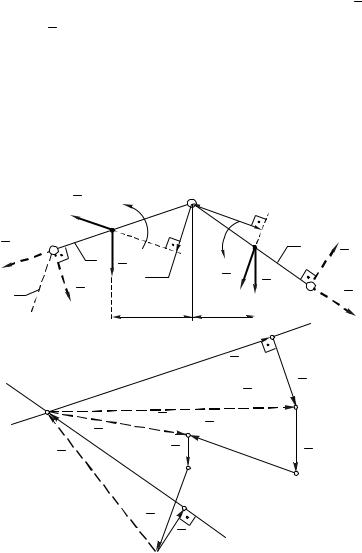
Рассмотрим задачу об определении реакций в кинематических парах группы Ассура II класса 1 вида.
Исходными данными для проведения силового анализа являются: размеры звеньев AB и BC группы (рис.4.10,а); положения центров масс звеньев S2 и S3;
массы звеньев m2 и m3; моменты инерции звеньев JS2 и
JS3 относительно осей, проходящих через центры масс звеньев перпендикулярно плоскости их движения.
Кроме того, известными должны быть ускорения аS2 и aS3 центров масс звеньев и угловые ускорения 2
и3 звеньев, которые определяются при выполнении кинематического анализа.
Внекотором масштабе l вычерчиваем группу 2-3
иприкладываем к звеньям этой группы все известные силы и моменты сил (рис.4.10,а):
силы тяжести звеньев G2 и G3 прикладываем в центрах масс звеньев и направляем вертикально вниз;
134 |
|
Лекция 8 |
||||||
|
|
|
|
|
|
|
|
|
силы инерции звеньев Fu2 и Fu3 прикладываем в |
||||||||
|
центрах масс звеньев и направляем их в стороны, |
|||||||
|
противоположные направлениям ускорений |
а |
S2 и |
|||||
|
a |
S3 центров масс звеньев; |
||||||
моменты Mи2 и Mи3 от сил инерции направляем противоположно направлениям угловых ускорений 2 и 3 звеньев.
Числовые значения всех этих сил определяем по формулам, приведенным в разделах 3.1.2 и 4.3.
|
|
Fи2 |
Mи2 |
В |
h |
|
|
|
|
|
|
|
S2 |
|
|
и3 |
|
|
|
|
А |
|
|
|
|
|
3 |
|
|
R12n |
2 |
|
hи2 |
Mи3 |
S3 |
R |
|||
|
|
|
G |
|
|
|
|
03 |
|
1 |
|
|
2 |
|
|
Fи3 |
G |
|
С |
|
|
|
|
|
|||||
|
|
R12 |
|
h2 |
|
h3 |
3 |
|
n |
|
|
|
|
|
|
k |
R03 |
||
|
|
|
|
а) |
|
|
|
||
|
|
|
|
|
|
p |
|
||
|
|
|
|
|
|
Rn |
|
|
|
n |
|
|
|
|
|
12 |
|
R12 |
|
s |
|
|
|
|
R12 |
|
|||
l |
|
|
R23 |
c |
a |
|
|||
|
|
n |
F |
|
|
|
|||
|
R |
R03 |
G3 |
|
и2 |
|
G2 |
|
|
|
|
|
d |
|
|
|
|||
|
03 |
|
|
|
|
b |
|
||
|
|
|
|
|
|
|
|
|
|
g
Fи3 R03 m
e 
б)
Рис. 4.10.
Раздел 4. Силовой анализ механизмов |
135 |
|
|
|
|
Врезультате силового анализа группы
определяются реакции в кинематических парах А,
Ви С .
Вкинематической паре А на звено 2 со стороны звена 1 действует реакция R12 , а в кинематической паре В
на звено 3 со стороны стойки – реакция R03. Учитывая, что эти кинематические пары вращательные, раскладываем реакции R12 и R03 на нормальные и тангенциальные составляющие: R12n и R12 , R03n и R03 (рис.4.10,а).
Направления этих составляющих принимаем произвольно. Если в результате расчета значение составляющей получим с отрицательным знаком, то это будет свидетельствовать о том, что ее истинное направление противоположно ранее принятому.
1). Значения R12 и R03 можно получить из
уравнения равенства нулю суммы моментов всех сил, действующих на звенья 2 и 3, относительно шарнира В.
Для звена 2:
mB Fk R12 |
AB l G2 h2 l |
|
|
2 |
Fu2 hu2 l Mu2 |
0. |
(4.2) |
|
|||
Для звена 3: |
|
|
|
mB Fk R03 |
BC l G3 h3 l |
|
|
3 |
Fu3 hu3 l Mu3 |
0. |
(4.3) |
|
В уравнениях (4.2) и (4.3): h2 и h3 плечи сил тяжести G2 и G3 относительно точки B; hu2 и hu3 плечи сил инерции Fu2 и Fu3 относительно точки B.
136 |
|
|
Лекция 8 |
|
||
Из уравнения (4.2) определяем величину и |
||||||
направление составляющей R12 : |
|
|||||
R |
|
|
G2 h2 Fu2 hu2 Mи2 l |
, |
(4.4) |
|
|
|
|
||||
12 |
|
|
AB |
|
||
|
|
|
|
|||
а из уравнения (4.3) величину и направление R03 |
: |
|||||
R |
|
G3 h3 Fu3 hu3 Mи3 l |
. |
(4.5) |
||
|
||||||
03 |
|
|
CB |
|
||
|
|
|
|
|||
Все линейные размеры, входящие в уравнения (4.4) и (4.5), измеряются по чертежу группы (рис 4.10,а).
2). Составляем векторное уравнение равновесия сил, действующих на группу 2-3:
Fk R12n R12 G2 Fu2 G3
2,3
Fu3 R03 R03n 0. (4.6)
В этом уравнении неизвестны величины и направления составляющих R12n и R03n реакций R12 и R03.
При этом известно, что линии действия этих составляющих проходят по осям звеньев AB и BC.
При составлении уравнения векторной суммы сил желательно придерживаться следующего порядка:
начинать и заканчивать уравнение необходимо силами, величины которых неизвестны;
сначала суммировать силы действующие на одно звено, а затем на второе.
Величины составляющих R12n и R03n реакций могут быть определены построением согласно уравнения (4.6)
Раздел 4. Силовой анализ механизмов |
|
137 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
векторного |
многоугольника |
(рис.4.10,б), |
который |
||||||||||||||||
называется планом сил. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Для этого из произвольной точки "p" |
откладываем |
||||||||||||||||||
в масштабе |
F |
первую известную силу из уравнения |
|||||||||||||||||
(4.6) – составляющую |
|
|
|
реакции |
|
|
в виде вектора |
|
|
. |
|||||||||
R |
|
R |
pa |
||||||||||||||||
|
|
12 |
|
|
|
|
12 |
|
|
|
|
|
|
|
|||||
Далее, к |
вектору |
|
|
прибавляем |
вектор |
|
|
, |
|||||||||||
pa |
|
ab |
|||||||||||||||||
изображающий в том же масштабе |
|
|
F следующую силу |
||||||||||||||||
|
|
2 . |
|
|
|
|
|
|
|
||||||||||
из уравнения (4.6) – силу тяжести G |
|
|
|
|
|
|
|
||||||||||||
Продолжая |
геометрическое |
|
сложение в |
порядке, |
|||||||||||||||
указанном в уравнении (4.6), получаем последовательно
вектора bc, cd, de |
и eg , изображающие соответственно |
||||||||||||||||||||||
известные силы |
|
|
|
|
|
|
|
|
|
|
и |
|
. |
|
|
|
|
|
|||||
F |
|
, G , |
F |
R |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
u2 |
3 |
|
u3 |
03 |
|
|
|
|
|
|||||||
|
|
После построения всех известных сил, через начало |
|||||||||||||||||||||
вектора |
|
|
|
(точку |
"p" ) |
проводим |
прямую |
|
kl |
||||||||||||||
|
pa |
||||||||||||||||||||||
параллельно |
линии |
действия |
нормальной |
реакции |
|
|
n |
||||||||||||||||
R |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
||
(параллельно AB), |
а через конечную точку |
"g" вектора |
|||||||||||||||||||||
|
|
– прямую |
|
|
|
mn, параллельно линии действия |
|||||||||||||||||
|
eg |
|
|
|
|||||||||||||||||||
нормальной |
реакции |
|
n |
(параллельно |
BC). Точка |
"s" |
|||||||||||||||||
R |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
03 |
|
|
|
|
|
|
|
|
|
|
|
|||
пересечения этих прямых является решением уравнения
(4.6). Эта точка определяет начало вектора sp и конечную точку вектора gs, которые в масштабе F соответственно изображают составляющие R12n и R03n . Так как векторная
сумма сил равна нулю, то направление векторов sp и gs выбираем таким образом, чтобы векторный многоугольник был замкнутым.

138 |
Лекция 8 |
3). Реакции R12 и R03 определяем по составляющим из векторных уравнений:
|
|
|
R |
|
|
R |
|
R |
n ; |
|
R |
|
|
R |
|
|
R |
|
n . |
(4.7) |
|||||||
12 |
|
|
12 |
12 |
03 |
03 |
03 |
|
|
|
|||||||||||||||||
Соединив |
точку |
"s" |
с точкой "a" на плане сил, |
||||||||||||||||||||||||
получим реакцию |
|
|
|
|
в виде вектора |
|
|
. Аналогично, |
|||||||||||||||||||
|
R |
12 |
|
|
sa |
||||||||||||||||||||||
соединив точки |
"e" |
|
|
и |
|
"s" , получим реакцию |
|
03 |
в виде |
||||||||||||||||||
|
|
|
R |
||||||||||||||||||||||||
вектора |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
es |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
4). Для определения реакции R23 в кинематической
паре B напишем векторное уравнение равновесия сил, действующих на звено 3:
|
|
|
|
|
|
|
|
|
|
|
|
|
Fk |
R23 G3 Fu3 R03 0. |
(4.8) |
||||||||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
Единственной неизвестной в уравнении (4.8)
является реакция R23 от 2 звена на 3. Величина и
направление этой реакции могут быть получены путем использования части уже построенного силового многоугольника (рис. 4.10,б). Для этого на плане сил
достаточно соединить точки "s" и "c" вектором sс,
который в масштабе F будет изображать реакцию R23, а
векторный многоугольник scdg будет графическим изображением уравнения (4.8).
Модули найденных реакций и их составляющих определяем умножением соответствующих отрезков, измеренных на плане сил, на масштабный коэффициентF плана:
Rn |
(sp) |
F |
; |
R (sa) |
F |
; |
12 |
|
|
12 |
|
||
Rn |
(gs) |
F |
; |
R (es) |
F |
; |
03 |
|
|
03 |
|
R23 R32 (sc) F.

Раздел 4. Силовой анализ механизмов |
139 |
|
|
|
|
Реакция R32 от звена 3 на звено 2 равна по величине реакции R23, но противоположна по направлению.
4.8. Силовой анализ группы Ассура II класса 2
вида
Особенности силового анализа групп Ассура II класса 2 и 3 видов рассмотрим на примере силового расчета кулисно-рычажного механизма, показанного на рис. 4.11.
Е |
S5 |
D |
|
х |
х |
5 |
|
|
|
|
4 |
S4 |
Fп.с. |
|
|
|
С |
||
|
|
1 |
А |
|
|
О |
|
|
H |
|
1 |
|
2 |
|
|
|
|
||
|
|
3 |
|
|
|
|
S3 |
|
|
|
B |
|
|
|
|
|
Рис. 4.11. |
|
|
Рассматриваемый механизм относится ко второму классу и состоит из начального звена 1 и двух групп Ассура II класса: группы второго вида (звенья 4 и 5) и группы третьего вида (звенья 2 и 3).
Определение реакций в кинематических парах начнем с последней в порядке присоединения группы, состоящей из звеньев 4 и 5.
Исходными данными для проведения силового анализа такой группы являются: размер звена CD;