

Бурлака, Кучеренко, Мазоренко, Тищенко, Основы теории механизмов и машин
.pdf80Лекция 5
Вбольшинстве случаев эти силы не остаются постоянными, а изменяют свою величину при изменении положения звеньев или их скорости. Функциональные зависимости, которые позволяют определить эти силы,
называются механическими характеристиками и могут быть представлены графически, аналитически, или массивом чисел в зависимости от параметра, который вызывает их изменение.
|
Например, сила F , которая возникает в результате |
||||||||
давления газов в цилиндре двухтактного ДВС на поршень |
|||||||||
3 (рис.3.1) зависит от его перемещения и представлена |
|||||||||
графически как функция положения поршня F f (SB). |
|
||||||||
|
|
|
|
F |
|
При |
движении |
||
|
|
|
|
b |
поршня влево в цилиндре |
||||
|
|
|
|
а |
происходит |
процесс |
|||
|
|
|
|
расширения |
газов |
и |
|||
|
|
|
|
|
сила |
F |
изменяется |
по |
|
SB |
d |
|
|
ветви |
аbd |
механической |
|||
|
|
характеристики. |
|
||||||
|
|
c |
|
|
|
|
|
|
|
|
А |
Ход поршня |
|
При |
движении |
||||
1 |
|
|
|
|
|||||
3 |
|
|
поршня |
|
вправо |
в |
|||
|
|
|
|
||||||
О |
1 |
2 |
В |
F |
цилиндре |
|
происходит |
||
процесс |
сжатия газов |
и |
|||||||
|
|
|
|
|
сила |
F |
изменяется |
по |
|
|
|
Рис. 3.1. |
|
|
ветви |
dcа |
механической |
||
|
|
|
|
характеристики. |
|
||||
|
|
|
|
|
|
||||
|
Так как сила |
F давления газов в цилиндре всегда |
|||||||
направлена влево, то при расширении, когда направление |
|||||||||
силы |
F |
совпадает с направлением движения поршня 3, |
|||||||
она совершает положительную работу, а при сжатии, когда |
|||||||||
сила F направлена противоположно направлению движения поршня 3, – отрицательную.
81
Если подача топлива в ДВС не изменяется, то при следующем обороте начального звена 1 механическая характеристика F f (SB) повторит свою форму. Это
значит, что сила F будет изменяться периодически и ее величину можно определить по механической характеристике в зависимости от перемещения точки B.
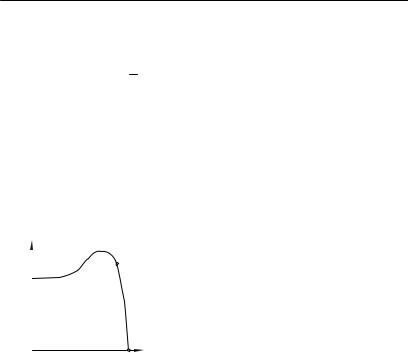
На рис. 3.2 показана механическая характеристика асинхронного электродвигателя, наиболее часто используемого для привода технологических машин, которая представляет собой зависимость вращающего момента от угловой скорости ротора.
Mд |
|
b |
|
Характеристика |
содержит |
|||
|
|
|||||||
а |
|
|
два участка |
– |
пусковой ab |
и |
||
|
|
|
рабочий bc. На рабочем участке |
|||||
|
|
|
|
|||||
|
|
|
|
движущий |
|
момент |
резко |
|
|
|
с |
|
изменяется |
при незначительном |
|||
0 |
|
|
изменении |
скорости |
вращения |
|||
|
Рис. 3.2. |
|
ротора. |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
От угловой |
|
скорости ротора |
зависят |
силы |
и |
|
моменты, действующие также в таких роторных машинах, как электрогенераторы, вентиляторы, центробежные насосы и т.д.
Если с увеличением угловой скорости момент движущих сил на роторе электродвигателя уменьшается, то момент сил сопротивления на роторе машин – потребителей обычно увеличивается. Такое изменение моментов очень полезно, так как автоматически содействует поддержанию режима движения устройства состоящего из электродвигателя и роторной машины потребителя.
При решении задач анализа механизмов механические характеристики считаются известными.

82 |
Лекция 5 |
Работа |
AG силы тяжести подвижного звена на |
некотором, отсчитываемом по вертикали перемещении hS
центра тяжести звена, равна:
AG Gk hS ,
где Gk – сила тяжести k звена.
Работа AG положительна, если проекция перемещения центра тяжести звена на направление силы
Gk совпадает с направлением этой силы, и отрицательна,
если эти направления противоположны.
К силам непроизводственных сопротивлений
относятся силы сопротивления воздушной или жидкой среды перемещению звеньев. Эти силы зависят от формы звена, его скорости и вязкости среды. Поскольку механизмы сельскохозяйственных машин в основном работают в воздушной среде (вязкость мала), то эти силы, по сравнению с остальными, незначительны, и в дальнейшем учитываться не будут.
Силы взаимодействия между звеньями – это силы, действующие в кинематических парах механизма. Согласно 3-му закону Ньютона, сила, с которой первое звено действует на второе в кинематической паре, равна по величине, но противоположна по направлению силе, с которой второе звено действует на первое.
Нормальные составляющие этих сил, т.е. направленные перпендикулярно к поверхности элементов кинематической пары, работы не совершают, так как угол между направлениями этих составляющих и допускаемыми направлениями поступательного перемещения поверхности элемента кинематической пары, на которую они действуют, составляет 90 .
Раздел 3. Динамический анализ механизмов |
83 |
Касательные составляющие этих сил возникают в результате трения в кинематической паре и направлены по касательной к поверхности элементов кинематической пары. Силы трения в кинематических парах работу совершают, причем работа сил трения всегда отрицательна.
Однако силы трения в кинематических парах могут быть определены только после определения нормальных реакций в этих парах, т.е. после выполнения силового анализа механизма (раздел 4). В связи с этим, задача решается путем последовательных приближений. Сначала выполняется динамический анализ механизма в первом приближении, при котором силы трения в кинематических парах не учитываются, а после определения закона движения начального звена выполняется силовой анализ механизма, определяются силы трения и если необходимо, то уточняется динамический анализ.
Более подробно силы взаимодействия между звеньями будут рассмотрены в разделе 4.
Силы и моменты первых четырех групп относятся к активным силам. Все эти силы приложены к механизму извне, а поэтому являются внешними.
Силы и моменты пятой группы, если рассматривать механизм в целом, являются внутренними. В случае, если рассматривается отдельное звено механизма, то по отношению к нему они будут внешними.
3.1.3. Режимы движения машинного агрегата
Процесс движения машинного агрегата удобно проследить по графику изменения угловой скорости кривошипа в зависимости от времени (рис. 3.3), т.е. звена, которое вращается в составе механизма и не имеет крайних положений. Часто это звено совпадает с

84 |
Лекция 5 |
выбранным за начальное при проведении структурного и кинематического анализа.
cр |
tц |
|
min |
|
|
max |
|
|
ω |
ω |
|
0 |
|
t |
|
выбег |
|
разбег установившееся движение |
||
tр |
tу.д. |
tв |
Рис. 3.3.
График f (t) носит название тахограммы машинного агрегата.
В общем случае тахограмма состоит из трех режимов: разбега, установившегося движения и выбега.
Разбег и выбег относятся к неустановившимся режимам, которые характеризуются непериодическими,
т.е. неповторяющимися изменениями скорости начального звена.
При установившемся движении скорость начального звена изменяется периодически.
Режим разбега (tp – время разбега) характеризуется возрастанием скорости начального звена от нулевого
значения до некоторого среднего значения |
ср , |
||
соответствующего |
нормальной |
рабочей |
скорости |
начального звена. |
|
|
|
При установившемся движении (tу.д. |
– время |
||
установившегося движения) скорость начального звена механизма периодически изменяется от min до max .
Раздел 3. Динамический анализ механизмов |
85 |
||
При этом, если ввести понятие средней ср |
угловой |
||
скорости: |
|
||
ср |
max min |
, |
|
|
|
||
2 |
|
|
|
то при установившемся движении она будет постоянной.
Режим выбега (tв – время выбега) характеризуется убыванием скорости начального звена от среднего значения ср до нулевого.
Полное время движения механизма будет равно:
t tр tу.д. tв .
Так как на установившемся режиме движения угловая скорость начального звена периодически повторяется, то для этого режима вводится понятие
времени цикла движения tц (рис.3.3).
Временем цикла движения начального звена на установившемся режиме движения механизма называется промежуток времени, за который повторяются положение звеньев, кинематические характеристики и силы, действующие на звенья.
Тогда:
tу.д. tц k ,
где k – количество циклов.
Полное время t установившегося движения
может состоять из любого числа циклов движения и зависит от того, сколь долго необходимо и возможно поддерживать рабочий режим механизма – режим со средней угловой скоростью ср .
Цикл может соответствовать одному или нескольким оборотам начального звена.

86 Лекция 5
Так, например, коленчатый вал у одноцилиндрового двухтактного двигателя внутреннего сгорания в течение цикла делает один оборот (положения звеньев, кинематические характеристики и силы повторяются через один оборот коленчатого вала), а у одноцилиндрового четырехтактного двигателя – два оборота (положения звеньев повторяются через один оборот, а движущие силы на поршне – только через два).
В некоторых машинах один цикл соответствует и
большему числу оборотов начального звена. |
|
||
Рассмотрим |
соотношения между |
работами |
|
движущих сил и |
сил |
сопротивления при |
разбеге, |
установившемся движении и выбеге.
На режиме разбега скорость начального звена возрастает от нуля до некоторого среднего значения, т.е. приращение кинетической энергии Т механизма будет положительным. Поэтому, энергетическая характе-
ристика этого периода может быть записана в виде:
|
Т Aд.с. Aс.с. 0, |
где Aд.с. |
– работа движущих сил за время разбега; |
Aс.с. |
– работа всех сил сопротивления, включая и |
|
производственные, за время разбега. |
Откуда вытекает, что на режиме разбега справедливо следующее соотношение работ движущих сил и сил сопротивления:
Aд.с. > Aс.с..
При установившемся движении механизма скорость начального звена повторяется через цикл, т.е. за этот промежуток времени изменение кинетической энергии Т механизма равно нулю.
Раздел 3. Динамический анализ механизмов |
87 |
Таким образом, за промежуток времени tц
энергетическая характеристика может быть представлена в виде:
Aд.с. = Aс.с. .
На отдельных участках цикла (рис.3.3) угловая
скорость начального звена уменьшается |
( Т <0), а на |
||
отдельных – |
возрастает |
( Т >0), но в |
целом за цикл |
Т = 0. |
|
|
|
Режим |
выбега |
характеризуется |
постепенным |
убыванием скорости начального звена до ее нулевого значения, т.е. происходит уменьшение кинетической энергии ( Т <0). В этом случае энергетическая характеристика этого режима будет выражаться неравенством:
Aд.с. Aс.с. .
Часто на режиме выбега работа движущих сил равна нулю, а из сил сопротивления действуют только силы трения в кинематических парах. Тогда остановка механизма будет происходить только под действием сил трения и по времени выбега tв можно судить о величине этих сил.
3.1.4. Динамическая модель машинного агрегата
Механизм машинного агрегата обычно является многозвенной системой, нагруженной силами и моментами, приложенными к различным её звеньям.
Чтобы лучше представить себе совокупность сил, действующих на звенья машинного агрегата, рассмотрим в качестве примера силовую установку (рис.3.4), в которой двигатель внутреннего сгорания (ДВС) приводит в движение через ременную передачу вал 4 потребителя механической энергии 5 (вал рабочей машины).

88 |
|
|
|
|
|
Лекция 5 |
|
|
|
|
|
|
|
|
|
|
Таким потребителем может быть электрогенератор, |
||||||||||||
вентилятор, центробежный насос или какая-либо другая |
||||||||||||||
рабочая машина. |
|
|
|
К поршню 3 приложена |
||||||||||
|
|
|
Fд.с. |
|
|
|||||||||
|
|
|
|
движущая сила Fд.с. , |
к ротору |
|||||||||
|
|
|
В |
|
||||||||||
|
|
|
|
4 рабочей машины – момент |
||||||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
3 |
|
сопротивления |
Mп.с. , |
к |
||||||
|
|
|
S |
2 |
G3 |
звеньям |
механизма |
– |
силы |
|||||
|
|
|
2 |
|
|
тяжести |
(G |
2 |
и |
G ), |
во |
всех |
||
|
|
|
|
G2 |
|
|
|
|
|
3 |
|
|
|
|
Mп.с. |
4 |
|
|
кинематических |
|
парах |
||||||||
А |
1 |
|
действуют силы трения (на |
|||||||||||
|
|
|
|
|
1 |
рис. 3.4 они не показаны). |
|
|
||||||
|
|
|
|
|
|
В |
случае |
если |
ДВС |
|||||
|
О1 |
|
|
О |
|
|
||||||||
5 |
4 |
|
|
|
|
будет многоцилиндровым, |
то |
|||||||
|
|
|
|
1 число звеньев и действующих |
||||||||||
|
|
|
|
|
|
|||||||||
|
|
|
Рис. 3.4. |
|
на |
них |
сил |
значительно |
||||||
|
|
|
|
возрастет. |
|
|
|
|
|
|
||||
|
|
Определение закона движения звеньев такой |
||||||||||||
сложной многозвенной системы представляет собой |
||||||||||||||
трудную задачу. |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
С другой стороны, учитывая, что рассматриваемый |
||||||||||||
механизм ДВС имеет одну степень подвижности (W 1), |
||||||||||||||
то достаточно знать закон движения всего лишь одного из |
||||||||||||||
его звеньев и если принять это звено за начальное, то |
||||||||||||||
законы движения остальных звеньев можно определить |
||||||||||||||
методами кинематического анализа. |
|
|
|
|
|
|
|
|||||||
|
|
Это приводит к мысли о том, что при динамическом |
||||||||||||
анализе вместо сложного многозвенного механизма можно |
||||||||||||||
рассмотреть движение только одного звена. |
|
|
|
|
||||||||||
|
|
Звено из состава механизма, движение которого |
||||||||||||
рассматривается, т.е. определяется его закон движения, |
||||||||||||||
называется звеном приведения. |
|
|
|
|
|
|
|
|
||||||

Раздел 3. Динамический анализ механизмов |
89 |
В качестве звена приведения можно выбирать любое звено механизма, совершающее вращательное или поступательное движение, но целесообразнее выбрать такое, которое находится в непрерывном вращательном движении (кривошип), так как такое звено, как правило, выбирают начальным и при проведении структурного и кинематического анализа. В дальнейшем будет рассматриваться в качестве звена приведения звено, совершающее вращательное движение.
Основное требование, которое предъявляется к звену приведения, заключается в том, что его
самостоятельное движение должно быть таким же,
как и в составе механизма. Расчетная модель, в которой вместо движения всех звеньев механизма рассматривается движение только одного звена при условии, что оно двигается, как в составе механизма, называется
однозвенной динамической моделью.
Так в силовой установке (рис.3.4) в качестве звена приведения можно выбрать коленчатый вал 1 механизма ДВС или ротор 4 рабочей машины.
Выберем в качестве звена приведения – коленчатый вал (кривошип) 1.
|
|
|
|
|
|
|
Тогда однозвенная динамическая |
||
M1пр |
1 |
|
|
модель (в дальнейшем ОДМ) будет |
|||||
|
|
|
1м |
состоять из стойки и звена приведения |
|||||
|
|
|
|||||||
|
Ј1пр |
|
|
|
1 (рис.3.5). Звено приведения будет |
||||
|
О |
обладать некоторым моментом инерции |
|||||||
|
|
|
|
|
|
|
Ј1пр и его |
движение происходит под |
|
|
|
|
|
|
|
|
|||
|
Рис. 3.5. |
действием |
некоторого |
вращающего |
|||||
|
|
|
|
|
|
|
момента M1пр . |
|
|
|
|
Величины |
момента инерции Ј1пр и |
момента сил |
|||||
M1пр должны быть такими, чтобы закон движения 1м звена приведения ОДМ полностью совпадал с законом