

Бурлака, Кучеренко, Мазоренко, Тищенко, Основы теории механизмов и машин
.pdf110 |
|
Лекция 6 |
||
|
|
|
|
|
маховика |
TM |
и по этой диаграмме находят величину |
||
TM max , |
входящую в расчетное уравнение (3.28). |
|||
|
Определение |
TM max осуществляется следующим |
||
образом. |
|
|
|
|
Пусть известны диаграмма A (кривая 1 на рис.
3.8,а), построенная относительно оси и диаграмма Tзв
(кривая 2 на рис. 3.8,б) кинетической энергии звеньев механизма.
A T
1 |
|
|
|
c |
T0 |
Tзв |
|
2 |
|||
3 |
|||
TM max |
|
|
|
d |
' |
|
|
a) |
б) |
|
|
Рис. 3.8. |
|
|
Согласно уравнению (3.31) прибавим к сумме работ |
|||
A значение |
кинетической энергии |
T0 механизма |
в |
начале цикла. |
Для этого сместим ось |
на величину |
T0 |
вниз (рис.3.8,а), после чего кривая 1 на рис.3.8,а относительно оси будет изображать кинетическую энергию механизма, как это следует из уравнения (3.31).
Вычтем, согласно уравнению (3.30), из кинетической энергии механизма T кинетическую энергию подвижных звеньев Tзв и получим кривую 3 на рис.3.8,а. Кривая 3,
относительно оси , и является кривой кинетической энергии TM маховика.
|
Раздел 3. Динамический анализ механизмов |
111 |
||||||||
|
|
|
|
|||||||
|
Отметим на этой кривой точку максимума "c" |
и |
||||||||
точку минимума "d" |
и по ним определим наибольшее |
|||||||||
изменение |
кинетической |
энергии маховика |
TM max , |
|||||||
необходимое для подсчета |
ЈM |
по уравнению (3.28). |
|
|
||||||
|
Так как, для подсчета |
ЈM |
по формуле (3.28) надо |
|||||||
знать не саму кинетическую энергию маховика |
TM , а её |
|||||||||
наибольшее |
изменение |
TM max , которое |
не |
зависит |
от |
|||||
начального значения T0 , то, следовательно, для |
||||||||||
определения |
TM max |
не |
нужно |
знать |
кинетическую |
|||||
энергию механизма в начале цикла T0 , т.е. не нужно |
||||||||||
устанавливать положение сдвинутой оси абсцисс . |
|
|
||||||||
|
Составим порядок определения момента инерции |
|||||||||
маховика по методу Мерцалова графическим способом. |
|
|
||||||||
|
1. Определяется |
|
приведенный |
момент |
сил |
|||||
производственных сопротивлений Mппр.c. (технологическая машина) или приведенный момент движущих сил Mдпр.с.
(энергетическая машина) для ряда положений звена приведения по формуле (3.9):
пр |
k |
|
i |
l |
|
||
Fi |
|
Mi |
i |
||||
M1 |
|
cos i |
|
. |
|||
|
|
||||||
|
i 1 |
|
1 |
|
i 1 |
1 |
|
В записанной формуле в качестве звена приведения выбрано звено 1.
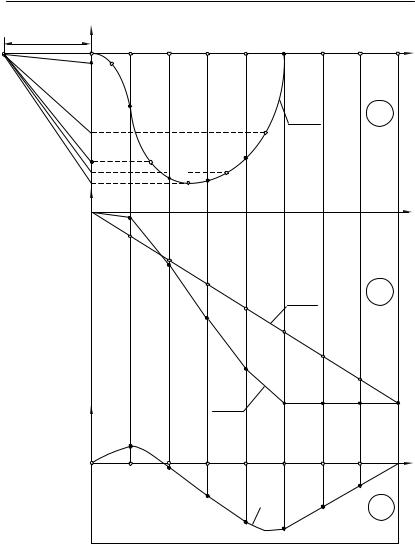
По полученным значениям приведенного момента в зависимости от угла поворота звена приведения строится
диаграмма Mпр f ( ) (кривая |
Mпр |
на рис.3.9,а). |
||
|
1 |
|
п.с. |
|
Масштаб M |
оси Mпр |
выбирается произвольно, а |
||
масштаб |
оси |
определяется длинной отрезка оси |
||
112 |
Лекция 6 |
|
|
|
|
(0,8) (рекомендуется 180 240 мм), который изображает
угол поворота ц звена п
риведения за цикл:
ц  .
.
Изображенная на рис. 3.9,а диаграмма Mпр f1( ) характерна для технологических машин. Приведенный момент Mппр.с. сил производственных сопротивлений таких
машин, как правило, отрицателен при рабочем ходе (положения 0 – 5) и равен нулю – при холостом (положения
6 и 7).
В энергетических машинах приведенный момент
Mдпр.с. движущих сил на части цикла будет положительным,
ана части – отрицательным.
2.Диаграмму работы сил производственных сопротивлений Aп.с. f2( ) (рис. 3.9,б) получают путем
графического интегрирования диаграммы Mппр.с. f1( ), так как эта работа определяется зависимостью:
|
|
|
|
A |
|
i |
Mпр |
d . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
п.с. |
0 |
п.с. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Как |
известно, |
|
графической |
|
интерпретацией |
||||||
интеграла есть |
площадь, |
|
находящаяся |
между кривой |
||||||||
Mпр |
f ( ) |
и осью . Например, |
на участке 0-1 работа |
|||||||||
п.с. |
1 |
|
|
|
|
|
|
|
|
|
|
|
сил сопротивления будет равна |
A |
пл.(0, с,1) |
M |
, |
||||||||
|
|
|
|
|
|
|
п.с.0-1 |
|
|
|
||
а на участке 1-2 – |
A |
пл.(1, с,d,2) |
M |
и т.д. |
|
|||||||
|
|
|
п.с.1-2 |
|
|
|
|
|
|
|
|
|
Отложив на соответствующих ординатах эти работы в масштабе A , получают диаграмму Aп.с. f2( ).
|
|
Раздел 3. Динамический анализ механизмов |
113 |
|||||||||
|
|
Mпр |
|
|
|
|
|
|
|
|
|
|
|
H |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
||
|
|
|
||||||||||
p |
|
|
а' |
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
Mппр.с. |
|
a) |
|
|
|
|
b' |
|
b |
|
|
|
|
|
|
|
|
|
A |
|
|
d |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2' |
|
3" |
|
|
|
|
|
|
|
|
|
|
|
|
|
Aд.с. |
|
б) |
||
|
|
|
|
|
|
3 |
|
4" |
|
|||
|
|
|
|
|
|
|
|
5" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6" |
|
|
|
|
|
|
|
|
|
4' |
|
|
|
7" |
|
|
|
T |
|
|
|
|
Aп.с. |
|
5' |
6' |
7' |
8' |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
1' |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
|
|
|
|
|
||||||||
|
|
|
0 |
1 |
2' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7' |
|
|
|
|
|
|
|
|
3' |
|
Т |
6' |
в) |
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
4' |
|
|
|
|
|
|
|
|
|
|
|
|
5' |
|
|
|
|
|
|
|
|
|
|
Рис. 3.9. |
|
|
|
|
||
|
|
Практически этих расчетов не делают, а выполняют |
||||||||||
следующие графические построения. Посредине участка, |
||||||||||||
например 0-1, на диаграмме |
Mппр.с. |
берут точку |
a и сносят |
|||||||||
ее |
на |
ось |
Mпр , |
тем |
самым |
площадь |
фигуры |
0,c,1 |
||||

114 Лекция 6
заменяется площадью прямоугольника высотой 0a' и основанием 0-1.
Полученную точку a' соединяют с точкой p начала полюсного расстояния интегрирования. Отрезок p0 H определяет масштаб построения диаграммы работ:
A M H .
На участке 0-1 диаграммы работ проводят прямую 01' параллельно pa', которая будет изображать работу
Mппр.с. на этом участке. Аналогично, посредине участка 1-2
берут точку b и сносят ее на ось Mпр . Полученную точку b' соединяют с точкой p и на диаграмме работ из точки 1'
проводят прямую 1'2' |
параллельно |
|
pb', изображающую |
|||||
работу Mппр.с. на участке 1-2 и т.д. |
|
|
|
|
|
|||
В результате построения получают ломаную линию |
||||||||
Aп.с. , изображающую работу сил производственных |
||||||||
сопротивлений в течение цикла. |
|
|
|
|
|
|||
Приведенный момент Mдпр.с. |
движущих сил для |
|||||||
технологических |
машин |
принимают |
|
постоянным и, |
||||
следовательно, диаграммой работ движущих сил Aд.с. |
будет |
|||||||
прямая линия, проходящая через точки |
0 |
и 8' |
диаграммы |
|||||
Aп.с. (рис.3.9,б). |
Это |
объясняется |
тем, |
что |
изменение |
|||
кинетической |
энергии |
T Aд.с. |
Aп.с. |
за |
цикл |
|||
установившегося режима движения равняется нулю, т.е.
вначале и в конце цикла |
должно выполнятся |
условие |
|
Aд.с. Aп.с. . |
|
|
|
|
В случае энергетической машины графическое |
||
интегрирование выполняют |
для приведенного |
момента |
|
Mдпр.с. |
движущих сил, а постоянным принимают |
момент |
|
Mппр.с. |
сил производственных сопротивлений. |
|
|

115
3. На основании диаграмм работ движущих сил Aд.с. и сил производственных сопротивлений Aп.с. строится
диаграмма изменения кинетической энергии T (рис.3.9,в) механизма с маховиком:
Ti Aд.с.i Aп.с.i .
Построение диаграммы сводится к откладыванию для соответствующих положений звена приведения
отрезков, которые заключены между кривыми Aд.с. и |
Aп.с. |
|||
диаграммы |
работ, |
т.е. для 1 положения ордината |
11' |
|
диаграммы |
T |
(рис.3.9,в) соответствует длине отрезка |
||
1'1" диаграммы |
работ (рис.3.9,б) и т.д. При этом |
|||
необходимо учитывать, что если |
Aд.с. > Aп.с. , то T > 0, и |
|||
наоборот, если Aд.с. < Aп.с. , то |
T < 0. Поскольку отрезки |
|||
с диаграммы работ переносятся на диаграмму кинетической энергии, то масштабы осей A и T равны: T A .
4. Определяется кинетическая энергия Tзв |
звеньев |
||
механизма в зависимости от угла поворота |
звена |
||
приведения. |
Вычисления |
выполняются |
путем |
суммирования кинетических энергий отдельных звеньев механизма (см. раздел 3.1.6).
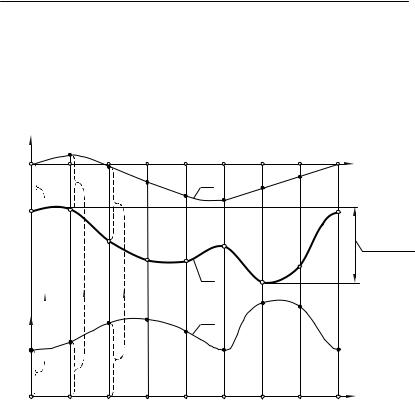
5. Строятся совмещенные диаграммы (рис.3.10) изменения кинетических энергий механизма (кривая 1), звеньев механизма (кривая 2) и маховика (кривая 3). Масштабные коэффициенты для осей T и Tзв
кинетических энергий диаграммы обязательно выбираются одинаковыми – T .
Диаграмма изменения |
кинетической энергии |
|
T f3( ) |
механизма (кривая 1) |
на рис.3.10 переносится |
в масштабе |
T с рис.3.9,в. |
|
116 |
|
|
Лекция 6 |
|
|
|
|
||
|
Диаграмма изменения кинетической энергии Tзв |
||||||||
звеньев механизма (кривая 2) |
строится в масштабе T по |
||||||||
расчетным данным. Расстояние от |
оси |
|
диаграммы |
||||||
T f3( ) до оси |
' |
диаграммы |
Tзв f4( '), как было |
||||||
показано выше, может быть произвольным. |
|
|
|||||||
T |
2 |
3 |
4 |
|
5 |
6 |
7 |
8 |
|
0 |
|
||||||||
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
0' |
1' |
|
|
|
|
|
|
8' |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
2' |
|
|
|
5' |
|
7' |
|
TМ max |
|
|
3' |
4' |
3 |
|
|
|
|
|
|
|
|
6' |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Tзв |
|
|
|
2 |
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 ' |
|
|
|
|
Рис. 3.10. |
|
|
|
|
|
Диаграмма |
изменения |
|
кинетической |
энергии |
|||
маховика (кривая 3) строится путем графического
вычитании из ординат диаграммы |
T f3( ) |
ординат |
|||||||
диаграммы |
Tзв f4( ) (на рис.3.10 показано пунктирными |
||||||||
линиями). |
По |
полученной |
диаграмме определяется в |
||||||
масштабе |
T |
максимальное изменение |
кинетической |
||||||
энергии маховика |
TМ max . Момент инерции |
ЈM |
маховика |
||||||
соответственно равен: |
|
|
|
|
|
|
|
||
|
|
Ј |
M |
|
TM max T |
. |
|
(3.33) |
|
|
|
|
|
||||||
|
|
|
|
2 |
|
|
|
||
|
|
|
|
|
cp |
|
|
||

Раздел 3. Динамический анализ механизмов |
117 |
|
|
|
|
4.2.4. Определение размеров маховика
Маховик конструктивно оформляют в виде сплошного диска или колеса с тяжелым ободом, устанавливаемого на одном из валов привода машины.
Зная момент инерции ЈM маховика можно определить его размеры.
Момент инерции дискового маховика относительно его геометрической оси, являющейся осью вращения, равен:
ЈM |
|
1 |
m D2 , |
(3.34) |
|
||||
|
8 |
|
|
|
где m – масса диска, кг ;
D – наружный диаметр диска, м.
Произведение массы маховика на квадрат его диаметра называют маховым моментом.
Для диска:
m D2 8 ЈM . |
(3.35) |
Если выразить массу через объем диска и плотностьматериала маховика (как правило, это сталь), то из формулы (3.34) получим:
ЈM |
b D4 |
|
|
||
|
|
|
, |
(3.36) |
|
|
|
||||
|
32 |
|
|
|
|
где b – ширина диска, м.
Тогда, диаметр маховика определяется из формулы:
D 4 |
32 ЈM |
. |
(3.37) |
|
|||
|
b |
|
|
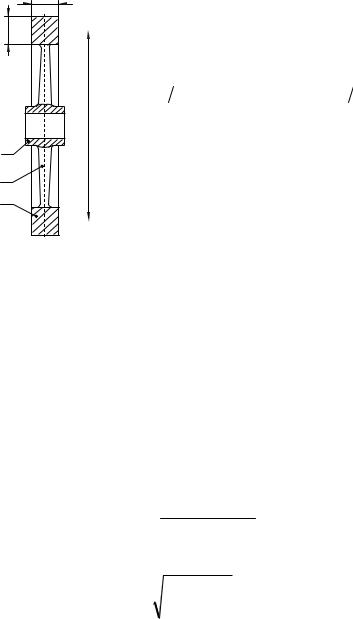
Маховик с тяжелым ободом (рис.3.10) состоит из массивного обода 1, который соединен со ступицей 2 при помощи спиц 3 (или тонкого диска).
118 |
Лекция 6 |
|
|
|
|
b
h
D |
2 |
3 |
1 |
Рис. 3.10. |
|
Основная масса (момент инерции) |
|||
такого |
маховика сосредоточен |
в |
ободе |
|
(около 90%). |
|
|
|
|
|
Материалом маховика |
является |
||
чугун |
при |
окружной скорости |
обода |
|
30 45 |
м с |
или сталь – 70 120 м с . |
||
|
При |
определении |
диаметра |
|
маховика с тяжелым ободом принимают,
что масса |
маховика |
равномерно |
||
распределена по окружности диаметра D. |
||||
Тогда |
момент |
инерции маховика |
||
определится равенством: |
|
|||
|
ЈM |
m D2 |
|
|
|
|
. |
(3.38) |
|
|
4 |
|||
|
|
|
|
|
Чтобы получить формулу для расчета диаметра D, следует выразить массу обода маховика через его объем:
V D b h.
Тогда выражение для момента инерции маховика примет вид:
b h D3 |
|
|||
ЈM |
|
|
. |
(3.39) |
|
4 |
|||
|
|
|
|
|
Выражению (3.39) можно придать другой вид, при |
||||
относительных метрических |
параметрах |
b/D и |
||
h/D: |
|
|
|
|
ЈM D5 , 4
тогда диаметр маховика определится из формулы:
D 5 |
4 ЈM |
. |
(3.40) |
|
|||
|
|
|
|
Раздел 3. Динамический анализ механизмов |
119 |
|
|
|
|
Контрольные вопросы к теме 3
1.В чем заключается основная задача динамического анализа механизмов?
2.Перечислите силы и моменты, действующие на звенья механизма.
3.Какой параметр является определяющим, при разделении движения механизма на установившееся движение и неустановившееся?
4.Что называется временем цикла движения?
5.Дайте определение звену приведения. Что является определяющим при выборе звена приведения?
6.Какое условие положено в основу определения приведенного момента сил?
7.Какое условие положено в основу определения приведенного момента инерции?
8.Запишите уравнение движения однозвенной динамической модели в энергетической форме.
9.Какие факторы вызывают непериодические колебания скорости входного звена механизма?
10.Что называется коэффициентом неравномерности хода машины?
11.Какова цель установки махового колеса в машине, в каких случаях маховик необходим и когда он не требуется?
12.Чем следует руководствоваться при выборе места установки маховика в машине?
13.Какие допущения приняты при определении момента инерции маховика по способу Мерцалова?
14.В чем заключается регулирование движения механизма?