

Бурлака, Кучеренко, Мазоренко, Тищенко, Основы теории механизмов и машин
.pdf250 |
Лекция 13 |
|
|
|
|
Тогда, передаточное отношение каждого из |
|||||
планетарных механизмов равно: |
|
|
|
|
|
U |
21 1 U |
H |
1 |
z21 |
. |
19,21 |
|
||||
|
19,H |
|
z19 |
||
|
|
|
|
||
В этом случае водила Н |
и Н вращаются с |
||||
одинаковыми угловыми скоростями, а трактор движется прямолинейно.
2.Включен только тормозной барабан Тб1.
Механизм 19, 20, 21, Н работает в планетарном режиме
с постоянным |
|
|
передаточным |
|
отношением |
U19,21H . |
||||
Механизм 19 |
|
, |
20 |
|
, |
|
, Н |
|
работает в |
дифферен- |
|
|
21 |
|
|||||||
циальном режиме. Перераспределение угловых скоростей
между водилом |
Н |
|
и центральным колесом |
|
|
21 |
определяется моментами сопротивления на валах этих звеньев. Поворот трактора по произвольному радиусу в сторону части, работающей в дифференциальном режиме. Причем чем больше момент сопротивления на вале водила Н , тем меньше радиус поворота.
3. Включены тормозные барабаны Тб1 |
и Тб2 . |
|||||||||
Механизм |
19, 20, 21, Н работает в планетарном режиме |
|||||||||
с постоянным передаточным |
|
|
отношением |
U19,21H . |
||||||
Поскольку |
тормозным |
барабаном |
Тб2 водило |
Н |
||||||
заторможено, то колеса |
19 |
|
, 20 |
|
, |
|
образуют рядовой |
|||
|
|
21 |
||||||||
зубчатый механизм. Поворот трактора с минимальным радиусом в сторону остановленного водила.
|
|
4. Включены тормозные барабаны Тб2 и Тб2 . |
||||
Водила |
|
Н |
и |
Н заторможены, колеса 19, 20, 21 и |
||
19 |
|
, 20 |
|
, |
|
образуют два рядовых зубчатых механизма. |
|
|
21 |
||||
Трактор остановлен.

252 |
Лекция 13 |
|
2 |
1 |
|
b |
|
|
|
d1 |
+2 |
|
|
|
|
|
1 |
|
|
d |
|
|
|
а) |
|
б) |
|
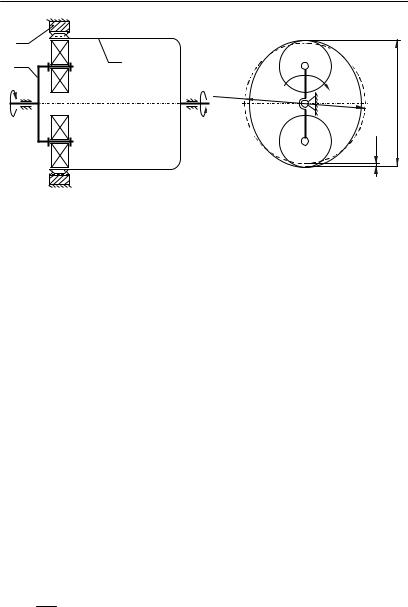
Рис. 6.23. |
|
Генератор волн служит для образования и движения волны деформации на гибком зубчатом колесе. Генераторы волн бывают двухроликовые, четырехроликовые, дисковые и кулачковые. Чаще всего применяются двухроликовые, у которых числа зубьев гибкого и жесткого колеса связаны соотношением z2 z1 2.
При вращении генератора каждая волна деформации бежит по периметру гибкого колеса, в результате каждый зуб гибкого колеса дважды войдет в зацепление. За один оборот генератора угол поворота входного вала равен b 2 . Вал гибкого колеса, при
этом, повернется в противоположную сторону на угол, равный произведению углового шага гибкого колеса на разность между числом зубьев 1 и 2 колеса:
|
|
2 |
z |
z |
, |
(6.63) |
|
z |
|||||||
1 |
|
1 |
2 |
|
|
||
|
1 |
|
|
|
|
||
где 2 – угловой шаг гибкого колеса. z1

Раздел 6. Многозвенные зубчатые механизмы. |
253 |
Если поделить углы поворота на время, то можно перейти к угловым скоростям. Тогда передаточное отношение от генератора волн к гибкому колесу при неподвижном жестком:
U |
b,1 |
|
b |
t |
|
|
2 |
|
|
|
|
z1 |
. |
(6.63) |
||
|
t |
2 |
|
|
|
|
z |
|
||||||||
|
|
|
z |
z |
|
|
|
z |
|
|
|
|||||
|
|
1 |
|
|
|
2 |
1 |
|
2 |
|
|
|||||
|
|
|
|
z |
|
|
||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
Уравнение (6.63) показывает, что передаточное отношение волновой зубчатой передачи зависит только от
чисел зубьев зубчатых колес |
1 и 2. |
Величина деформации гибкого колеса относительно |
|
мала и для стали составляет |
(0,003...0,015)d1. Такое |
соотношение и d1 соответствует большому числу |
|
зубьев. Малая же величина деформации определяет малую разницу между делительными радиусами гибкого и жесткого колеса, а, следовательно, небольшую разницу между числом зубьев этих колес. При таких соотношениях, z1 и z2 зазоры между зубьями в зоне деформации малы, благодаря чему одновременно в зацеплении находится большое число пар зубьев (до 40%).
Из вышесказанного можно отметить следующие особенности волновых зубчатых передач:
большое передаточное отношение (в передачах со стальным гибким колесом Ub,1 50 300;
при одновременном зацеплении большого числа зубьев передача воспринимает большие нагрузки при относительно малых габаритах и весе;
гибкое колесо можно изготовить в виде глухой оболочки и изготовить волновые механизмы, передающие вращение из одной среды в другую без подвижных уплотнений;
|
Раздел 7. Синтез кулачковых механизмов. |
255 |
|
ЛЕКЦІЯ 14 |
|
|
СОДЕРЖАНИЕ |
|
7. |
Синтез кулачковых механизмов. |
|
7.1. |
Назначение и классификация |
плоских |
|
кулачковых механизмов. |
|
7.2. |
Фазовая диаграмма кулачкового механизма. |
|
7.3. |
Исходные данные, необходимые для синтеза |
|
|
кулачкового механизма. |
|
7.3.Законы движения выходного звена.
7.1.Назначение и классификация плоских кулачковых механизмов
Для выполнения рабочего процесса в составе машины часто необходимо иметь устройства, движение выходных звеньев которых должно осуществляться строго по заданному закону и быть согласованным с движением других механизмов машины. Наиболее простыми, надежными и компактными для выполнения такой задачи являются кулачковые механизмы, которые позволяют реализовать практически любой закон движения выходного звена, включая и периодическую его остановку, при непрерывном движении входного звена.
Кулачковые механизмы применяются в двигателях внутреннего сгорания для привода клапанов системы газораспределения, в текстильных машинах, в машинахавтоматах и т.д.
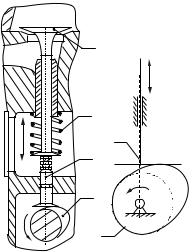
Кулачковым называют механизм, подвижное звено которого (кулачок 1), имеющее рабочую поверхность переменной кривизны, взаимодействует с другим подвижным звеном (толкателем 2), образуя высшую кинематическую пару А (рис. 7.1, 7.4).
Раздел 7. Синтез кулачковых механизмов. |
257 |
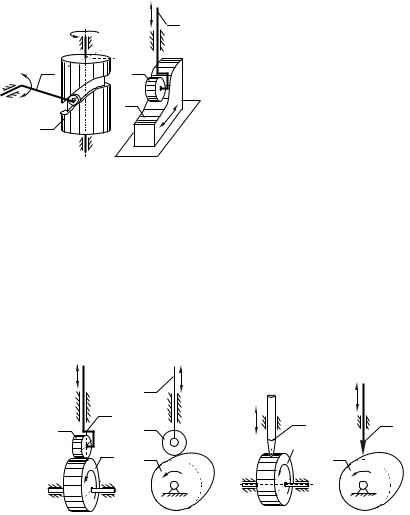
Все кулачковые механизмы могут быть разделены на две основные группы: плоские (рис. 7.1,а), у которых все точки звеньев движутся в одной или нескольких параллельных плоскостях, и пространственные (рис. 7.2).
|
|
В |
пространственных |
|||
|
2 |
кулачковых |
механизмах |
|||
|
кулачек 1 (рис. 7.2) имеет |
|||||
|
|
|||||
2 |
3 |
форму цилиндра с пазом, по |
||||
которому |
|
перемещается |
||||
|
1 |
ролик выходного звена 2. |
||||
|
В |
плоских |
кулачко- |
|||
1 |
|
вых механизмах |
ведущее |
|||
|
|
звено (кулачок 1) может |
||||
|
|
совершать |
|
вращательное |
||
Рис. 7.2. |
Рис. 7.3. |
(рис.7.1,а) |
|
или |
поступа- |
|
тельное (рис.7.3) движение. |
||||||
|
|
|||||
Ниже рассматриваются только плоские кулачковые механизмы с вращающимся кулачком, как получившие наибольшее распространение в технике.
Плоские кулачковые механизмы с вращающимся кулачком делятся на две группы.
Первая группа механизмов (рис. 7.1,а, 7.4,а и 7.4,в)
преобразует вращательное движение кулачка 1 в возвратно поступательное движение выходного звена 2, которое
|
2 |
|
|
|
2 |
В |
2 |
В |
2 |
3 |
3 |
|||
1 |
1 А |
1 |
1 |
А |
|
О |
|
|
О |
а) |
б) |
в) |
|
г) |
Рис. 7.4.

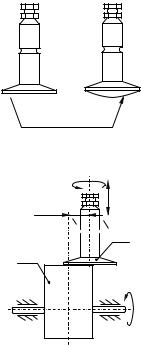
 Опорная поверхность
Опорная поверхность


 2
2