Очевидно |
следующее |
утверждение. Если dim R = n ≥1, то в |
пространствеR существует базис из n |
элементов. В качестве базиса можно |
взять любые n линейно независимых элементов. |
Теорема |
9.10 Пусть |
линейное |
пространство Vn обладает базисом |
e1 , e2 , ..., en . Тогда любой вектор x из Vn |
единственным образом представляется |
в виде |
|
|
|
x = x1e1 + x2e2 + ... + xn en . |
|
(9.6) |
Доказательство. В силу определения базиса линейного пространства V любой вектор x V имеет хотя бы одно представление вида (9.6). Предположим, что наряду с разложением (9.6) есть и другое разложение
x = x1′e1 + x2′e2 + ... + x′n en
вектора x . Тогда будет выполняться равенство
x = x1e1 + x2e2 + ... + xn en = x1′e1 + x′2e2 + ... + xn′en ,
которое приводит к равенству
(x1 − x1′)e1 + (x2 − x′2 )e2 + ... + (xn − x′n )en = 0 .
Последнее равенство в силу линейной независимости системы векторов
e1 , e2 , ..., en |
возможно лишь в том случае, когда |
|
|
′ |
′ |
|
′ |
, |
(x1 − x1 )= 0, |
(x2 − x2 )= 0, |
..., (xn − xn )= 0 |
т.е. при x1 |
′ |
′ |
′ |
. Это доказывает, что разложение вектора по |
= x1 , x2 |
= x2 , …, |
xn = xn |
базису единственно.
Линейное выражение (9.6) вектора x через векторы базиса, единственное в силу сформулированной теоремы, называют разложением вектора x по базису e1 , e2 , ..., en . Это разложение удобно записывать в матричной форме
x1
x = x1e1 + x2e2 +... + xnen = (e1 , e2 , ..., en ) xM2 = e [x],
xn
где e = (e1 , e2 , ..., en ) - заданный базис, записанный в виде матрицы-строки, а [x] -
столбец коэффициентов |
разложения вектора |
x |
по базису, |
называемых |
координатами вектора x в базисе e . |
|
|
|
Например, пусть |
V |
-пятимерное линейное |
пространство |
с базисом |
e1 , e2 , e3 , e4 , e5 , найдем координаты векторов e2 |
и |
x = 3e1 − e3 + 2e4 |
в данном |
базисе. |
|
|
|
|
|
|
Решение. Вектор x представим в виде |
|
|
|
x = 3e1 + 0e2 + (−1)e3 + 2e4 + 0e5 , |
|
|
|
следовательно, (3, 0, −1, 2, 0) |
- координаты вектора x в базисе e1 , e2 , e3 , e4 , e5 . |
Аналогично e2 |
= 0e1 +1e2 + 0e3 + 0e4 + 0e5 , |
следовательно, e2 (0, 1, 0, 0, 0) - |
координаты вектора e2 |
в заданном базисе. |
|
|
|
Векторы линейного пространства V полностью определяются своими координатами в данном базисе. При этом операции над векторами сводятся к аналогичным операциям над их координатами. Так, для векторов
x = x1e1 + x2e2 |
+ ... + xn en и y = y1e1 + y2e2 |
+ ... + yn en |
условие их равенства, x = y , равносильно условиям |
x1 = y1 , |
x2 = y2 , …, |
xn = yn , |
а равенства |
|
|
|
x + y = (x1e1 + x2e2 + ... + xn en )+ (y1e1 + y2e2 + ... + yn en )= |
= (x1 + y1 )e1 + (x2 + y2 )e2 + ... + (xn |
+ yn )en |
(9.7) |
и
λx = λ(x1e1 + x2e2 + ... + xn en )= (λx1 )e1 + (λx2 )e2 + ... + (λxn )en
показывают, что при сложении векторов их соответствующие координаты складываются, при умножении вектора на число все его координаты умножаются на это число.
Например, в некотором базисе даны векторы x(2, −1, 3, 5) и y(−1,4, 0, − 2) . Найдем координаты вектора 2x − 3y .
Решение. Учитывая свойство (9.7), находим координаты вектора 2x − 3y : (2 2 − 3 (−1), 2 (−1) − 3 4, 2 3 − 3 0, 2 5 − 3 (−2)) = (7, −14, 6, 16).
9.4 Ранг системы векторов линейного пространства |
|
Рассмотрим систему m векторов |
|
x1 = (x11 , x21 , ..., xn1 ), |
|
|
x2 = (x12 , x22 , ..., xn2 ), |
|
(9.8) |
............................. |
|
|
|
|
= (x |
|
|
|
|
) |
|
x |
m |
, x |
2m |
, ..., x |
nm |
|
|
1m |
|
|
|
|
линейного n -мерного пространства, координаты которых заданы в одном и том же базисе. Системе векторов (9.8) поставим в соответствие матрицу
x |
x |
... |
x |
|
|
|
11 |
12 |
|
1m |
|
|
x21 |
x22 |
... |
x2m |
, |
(9.9) |
X = |
... |
... |
... |
|
... |
|
|
|
|
xn2 |
... |
|
|
|
|
xn1 |
xnn |
|
|
в k -м столбце которой записаны координаты вектора xk ( k =1, 2, ..., m ). Матрицу
(9.9) называют матрицей системы векторов (9.8) в данном базисе, а ранг этой матрицы – рангом системы векторов x1 , x2 , ..., xm . Обратно, если дана матрица
(9.9), ей можно поставить в соответствие систему (9.8) m векторов линейного n - мерного пространства. Столбцы матрицы (9.9) линейно зависимы, если векторы (9.8) линейно зависимы и обратно.
Приведем без доказательства теорему, которая позволяет судить о линейной независимости векторов, заданных своими координатами.
Теорема 9.11 Для того чтобы m векторов линейного пространства были линейно независимы, необходимо и достаточно, чтобы ранг матрицы этой системы был равен m .
Следствие 1. Система n векторов n -мерного линейного пространства линейно независима тогда и только тогда, когда матрица этой системы векторов является невырожденной.
Следствие 2. Если ранг матрицы системы m векторов линейного пространства равен r , максимальное число линейно независимых векторов этой системы равно r .
Например, найдем максимальное число линейно независимых векторов в системе a1 (1, 4, 2, 7) , a2 (−1, − 2, − 3, − 6) , a3 (0, 5, 0, 5) , a4 (3, 0, 6, 9) , a5 (2, 3, 1, 6) .
Решение. Матрица данной системы векторов имеет вид
|
1 |
−1 |
0 |
3 |
2 |
|
|
4 |
− 2 |
5 |
0 |
3 |
|
|
|
A = |
2 |
− 3 |
0 |
6 |
1 |
. |
|
|
|
7 |
− 6 |
5 |
9 |
6 |
|
|
|
Так как ранг этой матрицы равен трем, то максимальное число линейно независимых векторов этой системы равно трем.
Замечание. Можно доказать, что максимальное число линейно независимых строк всякой матрицы равно максимальному числу ее линейно независимых столбцов, т.е. равно рангу этой матрицы.
9.5 Матрица перехода от базиса к базису. Преобразование координат вектора
Рассмотрим в линейном пространстве V два базиса:
e1, e2 , ..., en ; |
|
|
|
(9.10) |
e1′, e2′ , ..., en′ . |
|
|
|
(9.11) |
Матрицей перехода от базиса (9.10) к базису (9.11) называется матрица |
системы векторов e1′, e2′ , ..., en′ |
в базисе e1, e2 , ..., en . |
Из определения следует, что если |
t |
t |
... |
t |
|
|
11 |
12 |
|
1n |
|
t21 |
t22 |
... |
t2n |
(9.12) |
T = |
|
... |
... |
|
... ... |
|
|
|
tn2 |
... |
|
|
|
tn1 |
tnn |
|
есть матрица перехода от базиса (9.10) к базису (9.11), то
|
|
e′ |
= t e |
+ t e |
+... + t |
e |
n |
; |
|
|
|
1 |
11 1 |
21 2 |
|
n1 |
|
|
|
|
e2′ |
= t12e1 + t22e2 +... + tn2en ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
...................................... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
или |
en′ = t1ne1 + t2ne2 +... + tnnen |
|
|
′ |
′ |
′ |
e2 ... en ) T . |
(9.13) |
|
|
|
|
(e1 |
e2 ... en )= (e1 |
Из теоремы о линейной независимости векторов следует, что матрица перехода от базиса к базису является невырожденной и всякую невырожденную матрицу порядка n можно рассматривать как матрицу перехода от базиса к базису в n -мерном пространстве.
Очевидно, что матрица T −1 , |
обратная матрице (9.12), |
является матрицей |
перехода от базиса (9.11) к базису (9.10). |
|
базис i, j , |
|
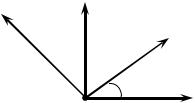
Например, рассмотрим в линейном пространстве |
M 2 |
а также |
базис e1, e2 (рисунок 103). |
j |
|
|
|
|
|
e2 |
|
|
|
|
|
|
е1 |
|
|
|
|
|
|
φ |
|
|
|
|
|
|
i |
|
|
|
|
|
|
Рисунок 103 |
|
|
|
В этом случае |
|
|
|
|
|
e = i cosϕ + j sinϕ; |
|
|
|
|
1 |
|
|
|
|
|
|
e2 = −isinϕ + j cosϕ. |
|
|
|
|
Следовательно, матрицей перехода от базиса i, j |
к базису e1, e2 |
является |
матрица |
|
|
|
|
|
|
cosϕ |
− sinϕ |
|
|
|
|
|
|
, |
|
|
|
|
|
cosϕ |
|
|
|
|
|
sinϕ |
|
|
|
|
|
тогда как матрицей перехода от базиса e1, e2 к базису i, j |
является матрица |
|
cosϕ |
sinϕ |
|
|
|
|
A−1 = |
|
. |
|
|
|
|
|
− sinϕ |
|
|
|
|
|
|
cosϕ |
|
|
|
|
Задача преобразования координат заключается в нахождении зависимости между координатами вектора в разных базисах.
Формулы, связывающие координаты вектора в разных базисах,
называются формулами преобразования координат.
Теорема 9.12 Если x1, x2 , ..., xn - координаты вектора x в базисе
e1, e2 , ..., en , а x1′, x2′ , ..., xn′ - координаты этого же вектора в базисе e1′, e2′ , ..., en′ , то имеет место следующее соотношение:
x |
|
x′ |
|
|
|
1 |
|
|
1 |
|
|
x2 |
|
x2′ |
|
(9.14) |
|
M |
=T |
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xn |
|
xn′ |
|
|
или |
|
|
|
|
|
|
X =TX ′, |
|
|
|
где X = (x1 x2 |
... xn )T ; X ′ = (x1′ x2′ ... xn′ )T ; T - матрица перехода |
от базиса |
e1, e2 , ..., en к базису e1′, e2′ , ..., en′ . |
|
Доказательство. Из условия теоремы следует, что |
|
x = |
(e1 e2 |
... en )X ; |
(9.15) |
x = (e1′ e2′ |
... en′ )X ′. |
(9.15)' |
Учитывая соотношение (9.13), из равенства (9.15)' получаем |
|
x = |
(e1 e2 ... en )TX ′. |
(9.16) |
Так как равенства (9.15) и (9.16) есть символическая запись разложения вектора x по базису e1, e2 , ..., en , а для каждого вектора разложение единственно,
то |
|
|
|
|
|
|
|
|
|
|
|
X =TX ′. |
|
|
|
|
|
|
|
(9.17) |
Из соотношение (9.17) выразим матрицу X ′, имеем |
|
TX ′ = X , |
|
|
|
|
|
|
|
|
T −1TX ′ =T −1 X . |
|
|
|
|
|
Таким образом матрица X ′ |
запишется в виде |
|
|
X ′ =T −1 X . |
|
|
|
|
|
|
(9.18) |
Формулы (9.17) и (9.18) являются формулами преобразования координат. |
Например, |
пусть вектор x в базисе e1, e2 |
имеет координаты (1, − 2). |
Найдем координаты этого вектора в базисе e1′ = e1, |
e2′ |
= e1 + e2 . |
Решение. Матрица перехода от базиса e1, e2 |
к базису e1′, e2′ имеет вид |
T = |
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
Искомые координаты x1′, x2′ находим по формуле (9.18): |
x′ |
|
=T −1 |
|
1 |
|
|
|
|
|
|
1 |
|
|
|
. |
|
|
|
|
|
|
|
|
|
− 2 |
|
|
|
|
|
|
x2′ |
|
|
|
|
|
|
|
|
|
|
Матрица, обратная матрице T , имеет вид: |
|
|
T −1 |
|
|
1 |
−1 |
|
|
|
|
|
|
= |
|
|
. |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
Таким образом, |
|
|
|
|
|
x′ |
|
= |
1 −1 |
1 |
|
3 |
|
|
1 |
|
|
|
|
|
= |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
x2′ |
|
|
0 |
|
1 |
− 2 |
|
− 2 |
|
|
Следовательно, |
x1′ = 3, |
x2′ = −2 . |
|
|
9.6 Изоморфизм линейных пространств
Пусть даны два линейных пространства V и U . Если между элементами x V и y U этих пространств установлено взаимно-однозначное соответствие,
будем писать x ↔ y .
Два линейных пространства V и U называются изоморфными, когда между их элементами можно установить взаимно однозначное соответствие такое, что если x1 ↔ y1 , x2 ↔ y2 , где x1 , x2 V , y1 , y2 U , то
1) (x1 + x2 )↔ (y1 + y2 );
2) αx1 ↔αy1 ,
где α - действительное число.
Обозначение: V ~ U - линейное пространство V изоморфно линейному пространству U .
Если V ~ U и x ↔ y , где x V , а y U , то y называют образом элемента
x , а x называют прообразом элемента y . |
|
|
Отметим, |
что если V ~ U , то θ →θ′, где θ |
и θ′ - |
нулевые элементы |
пространств V |
и U . Примем без доказательства |
теорему |
о необходимом и |
достаточном условии изоморфизма двух линейных пространств.
Теорема 9.13 Два линейных пространства изоморфны тогда и только тогда, когда они имеют одинаковую размерность.
Все линейные пространства одной и той же размерности изоморфны между собой.
Таким образом, различные линейные пространства одной и той же размерности с алгебраической точки зрения тождественны.
Очевидно, очень важной является следующая теорема.
Теорема 9.14 Если линейные пространства R и R′ изоморфны, то
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
линейно независимым элементам |
x1 , ..., |
xm |
пространства |
R соответствуют |
линейно независимые элементы |
′ |
′ |
|
|
|
′ |
. |
|
|
|
|
x1 , ..., xm пространства |
R |
|
|
|
линейно |
Доказательство. |
Предположим, |
что элементы |
x1 , ..., xm |
|
|
независимы, а их образы |
′ |
′ |
линейно зависимы. Тогда существует линейная |
x1 , ..., |
xm |
комбинация |
элементов |
′ |
′ |
, равная нулевому элементу θ |
′ |
, не все |
x1 , ..., xm |
|
коэффициенты которой равны нулю. В силу изоморфизма пространств R и R′ эта |
линейная |
комбинация |
является |
образом |
линейной |
комбинации |
|
элементов |
x1 , ..., xm |
с теми же коэффициентами. |
С другой стороны, элемент θ′ |
является |
образом |
нулевого элемента |
θ |
пространства R . Следовательно, указанная |
линейная комбинация элементов x1 , ..., |
xm , не все коэффициенты которой равны |
нулю, равна |
нулевому |
элементу |
θ , |
и |
поэтому элементы |
x1 , ..., xm |
линейно |
зависимы, что противоречит условию. Полученное противоречие доказывает, что элементы x1′, ..., x′m также линейно независимы.
234
Приведем примеры изоморфных линейных пространств:
1) Линейное пространство X геометрических векторов, выходящих из начала координат трехмерного пространства, с обычными операциями сложения векторов и умножения вектора на число изоморфно действительному арифметическому пространству K3 , так как каждому вектору x X можно
поставить во взаимно однозначное соответствие вектор-столбец x′ = (x1 , x2 , x3 )T
его координат в некотором фиксированном базисе. При таком соответствии будут выполняться соотношения
x + y ↔ x′ + y′ = (x1 + y1 , x2 + y2 , x3 + y3 )T ;
λx ↔ λx′ = (λx1 , λx2 , λx3 )T .
2)Линейное пространство M 22 квадратных матриц второго порядка над
полем P с обычными операциями сложения матриц и умножения матрицы на элементы поля P и арифметическое пространство K4 над полем P изоморфны,
так как каждой матрице
из M 22 во взаимно однозначное |
соответствие можно поставить вектор-столбец |
α = (a11 , a12 , a21 , a22 )T из K4 и при |
этом будут выполняться соотношения |
A + B ↔α + β , |
λA ↔ λα . |
3) Линейное |
пространство P2 (x) многочленов степени n ≤ 2 с |
действительными коэффициентами и с обычными операциями сложения
многочленов и умножения многочлена на |
действительное число изоморфно |
действительному |
|
арифметическому пространству K3 , так |
как многочлену |
f (x) = a |
0 |
+ a x + a |
2 |
x2 |
можно поставить |
в соответствие |
вектор-столбец |
|
1 |
|
|
|
|
(a0 , a1 , a2 )T , при этом будут выполняться соотношения
(a0 + a1 x + a2 x2 )+ (b0 + b1 x + b2 x2 )↔ (a0 , a1 , a2 )T + (b0 , b1 , b2 )T , λ(a0 + a1 x + a2 x2 )↔ λ(a0 , a1 , a2 )T .
9.7 Подпространство линейного пространства
Введем понятие подпространства. Множество W V называется
подпространством линейного пространства V , если выполняются следующие условия:
1)во множестве W определены те же операции, что и в множестве V ;
2)если x, y W , то x + y W ;
3)если x W , то αx W .
Очевидно, всякое подпространство W линейного пространства V является линейным пространством, т.е. в W выполняются аксиомы I – VIII.
235
Прежде всего, в W имеется нулевой элемент θ : если x W , то 0x =θ W . Для любого элемента x W имеется противоположный элемент − x : если x W , то (−1)x = −x W . Легко видеть, что аксиомы I – VIII для элементов множества
W будут выполнены. Отметим, что нулевой элемент θ линейного пространства V образует подпространство данного пространства, которое называют нулевым подпространством. Само линейное пространство V можно рассматривать как подпространство этого пространства. Эти подпространства называют тривиальными, а все другие, если они имеются, - нетривиальными.
Приведем примеры нетривиальных подпространств линейных пространств.
1)Множество V2 всех свободных векторов a(a1 , a2 ), параллельных
некоторой плоскости, для которых обычным образом определены операции сложения векторов и умножения вектора на число, является подпространством линейного пространства V3 .
2)Множество V1 всех свободных векторов a(a1 ), параллельных некоторой прямой, представляет подпространство линейного пространства V2 .
3)Множество {Pn−1 (x)} всех алгебраических многочленов степени, не
превышающей натурального числа n −1, является подпространством линейного пространства {Pn (x)}.
9.8 Линейная оболочка системы векторов
Пусть в линейном пространстве V над полем Р дана система векторов a1, a2 , ..., ak . Множество всевозможных линейных комбинаций
α1a1 +α2a2 + ... +αk ak
этой системы называют линейной оболочкой системы векторов a1, a2 , ..., ak .
Теорема 9.15 Линейная оболочка L системы векторов a1, a2 , ..., ak
является подпространством в X .
Доказательство. Действительно, если векторы a и b принадлежат L , т.е. имеют представления
a =α1a1 +α2a2 + ... +αk ak , b = β1a1 + β2a2 + ... + βk ak ,
то и векторы a + b и λa имеют такие представления: a + b = (α1 + β1 )a1 + (α2 + β2 )a2 + ... + (αk + βk )ak , λa = (λα1 )a1 + (λα2 )a2 + ... + (λαk )ak .
Следовательно, они принадлежат L, что и требовалось доказать. Линейную оболочку L системы векторов a1, a2 , ..., ak также называют
подпространством, порожденным этой системой векторов, или подпространством, натянутым на эту систему векторов, и обозначают
L = (a1, a2 , ..., an ).
Теорема 9.16 Линейное подпространство конечномерного линейного пространства является конечномерным, и размерность подпространства не превышает размерности всего линейного пространства.
Доказательство. Действительно, размерность конечномерного линейного пространства V может быть определена как максимальное количество линейно независимых векторов в этом пространстве. Очевидно, что максимальное количество линейно независимых векторов в любом подмножестве L в V не превышает максимального количества линейно независимых векторов в V . Отсюда следует утверждение теоремы.
Любое конечномерное линейное пространство порождается конечной системой векторов, например, любым своим базисом. Согласно доказанной теореме это верно и для всякого линейного подпространства линейного пространства.
Теорема 9.17 Пусть L - подпространство п-мерного линейного пространства V . Любой базис a1, a2 , ..., ak в L можно дополнить до базиса
a1, a2 , ..., ak , ak +1,..., an всего линейного пространства V , причем линейному
подпространству L принадлежат те и только те векторы, которые в указанном базисе имеют столбцы координат вида
(x1′, x2′ , ..., xk′ , 0, ..., 0)T . |
(9.19) |
Доказательство. Действительно, любой базис в L, как и вообще любую линейно независимую систему векторов в V можно дополнить до базиса линейного пространства V . Если вектор х имеет столбец координат (9.19), то он имеет представление
x = x1′a1 + x2′a2 + ... + xk′ ak + 0 ak +1 + ... + 0 an = x1′a1 + x2′a2 + ... + xk′ ak
и, следовательно, принадлежит L как линейная комбинация векторов, принадлежащих L. Если вектор х принадлежит L, он может быть разложен по базису a1, a2 , ..., ak
x = x1′a1 + x2′a2 + ... + xk′ ak
Это разложение в то же время является разложением вектора x в базисе a1, a2 , ..., an линейного пространства V , дающим столбец координат вида (9.19).
Теорема 9.18 Пусть V – конечномерное линейное пространство и в нем задан базис. Тогда для любого линейного подпространства L в V можно указать такую однородную систему линейных уравнений Ах = 0, что множество координатных столбцов всех векторов L будет совпадать с множеством решений системы Ах = 0.
Доказательство. Пусть e1, e2 , ..., en – заданный базис в V . Выберем в L некоторый базис в a1, a2 , ..., ak и дополним его векторами ak +1, ak +2 , ..., an до
базиса в V . Из предыдущей теоремы вытекает, что множество векторов линейного подпространства L в базисе a1, a2 , ..., an описывается системой
уравнений xk′ +1 =... = xn′ = 0 .

Пусть T – матрица перехода от базиса e1, e2 , ..., en к базису a1, a2 , ..., an . Тогда столбец координат xe вектора в базисе a1, a2 , ..., an связан со столбцом координат xe′ этого же вектора в базисе e1, e2 , ..., en равенством xe =Txa . Если столбец координат ха является решением однородной системы Ах = 0, то в силу соотношения xa =T −1xe столбец координат xe , является решением однородной системы AT −1x = 0 . Верно и обратное: если хе есть решение системыAT −1x = 0 , т.е. AT −1xe = 0 , то Axa = 0 , т.е., столбец ха является решением системы Ax = 0 . Из
этих рассуждений вытекает следующее: если некоторое множество в заданном базисе описывается однородной системой линейных уравнений (иными словами, совокупность всех столбцов координат векторов множества совпадает с множеством решений системы), то и в любом другом базисе это множество описывается некоторой системой линейных уравнений.
Так как линейное подпространство L в базисе a1, a2 , ..., an описывается
однородной системой линейных уравнений, то это подпространство в соответствии с только что доказанным и в базисе e1, e2 , ..., en описывается
системой линейных уравнений.
Однородную систему линейных уравнений, описывающую данное линейное подпространство L, называют общими уравнениями этого подпространства.
Например, составим общие уравнения линейного подпространства L = a1, a2 в четырехмерном линейном пространстве V , если векторы a1 и a2
заданы своими координатами в некотором базисе e :
[a |
] |
= (1, 1, 2, 0)T , |
[a |
2 |
] |
= (1, −1, 0, 2)T . |
1 |
e |
|
|
e |
|
Решение. Нетрудно убедиться в том, что система векторов a1 и a2 линейно
независима и потому составляет базис в линейном подпространстве L. Дополним эту систему до базиса в линейном пространстве V векторами a3 и a4 , в качестве
которых; можно взять пару векторов из базиса e :
[a3 ]e = (0, 0, 1, 0)T , |
|
[a4 ]e = (0, 0, 0, 1)T . |
Матрицей |
перехода |
от базиса e к базису a = (a1 , a2 , a3 , a4 ) является |
матрица |
|
|
1 |
1 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
−1 |
0 |
0 |
|
|
|
|
T = |
|
|
, |
|
|
|
2 |
0 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
2 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
обратной к которой является матрица |
|
|
|
1 2 |
1 2 |
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
T |
−1 |
|
1 2 |
−1 2 0 0 |
|
|
= |
−1 |
−1 |
|
1 |
0 |
. |
|
|
|
|
|
|
|
|
|
|
−1 |
1 |
|
|
0 |
1 |
|
|
|
|
|
|
|
|

