

2.2 Реальная динамика тела в среде
При малых значениях скорости сила сопротивления среды пропорциональна скорости, при больших- начинает сильнее зависеть от нее. Восстановление силы сопротивления динамической системы является сложной экспериментальной задачей и, обычно, в моделировании используется степенное разложение при условии, что изменение знака проекции скорости меняет знак проекции силы, т.е. F=Av+B|v|v+Cv3+...
При решении задач
предпочтительнее разложение в ряд по
нечетным степеням аргумента, для нечетных
функций, причем нелинейные задачи, как
правило, не имеют аналитического
решения. Заметим, что в широком диапазоне
чисел Рейнольдса ~102-
106
сила сопротивления является квадратичной
функцией скорости
![]() .
Здесь С~0.5
для шара,
.
Здесь С~0.5
для шара,
![]() -
плотность среды, S-
площадь поперечного сечения тела.
-
плотность среды, S-
площадь поперечного сечения тела.
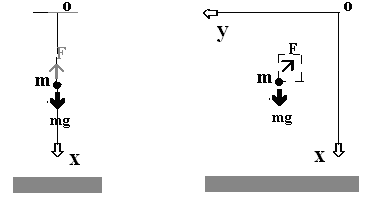
(а) (б)
Рис.2. Динамика тела с учетом сопротивления среды
Рассмотрим простой одномерный случай падения тела в вязкой среде вдоль оси X, без начальной скорости (рис. 2 а). Начало координат поместим в точку О, из которой начинается движение тела. На тело действуют две силы: сила тяжести mg и сила сопротивления воздуха F=-kv.
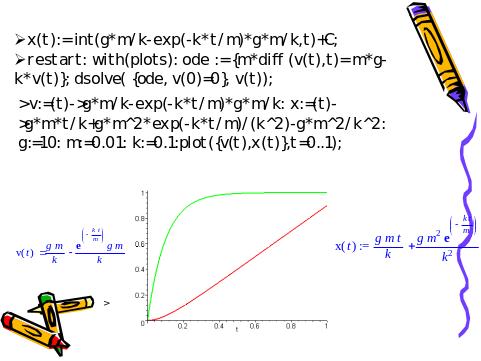
Слайд 8. Динамический метод на компьютере
По второму закону
Ньютона имеем дифференциальное
уравнение для неизвестной функции
скорости v(t):
![]() .
Разделяя переменные, находим
.
Разделяя переменные, находим
![]() ,
или
,
или
![]() .
Далее, после интегрирования получаем:
.
Далее, после интегрирования получаем:
![]() .
Произвольную постоянную С
определяем из начальных условий
v(0)=0: C =
Ln(mg/k). После
несложных преобразований находим
закон изменения скорости тела:
.
Произвольную постоянную С
определяем из начальных условий
v(0)=0: C =
Ln(mg/k). После
несложных преобразований находим
закон изменения скорости тела:
![]() .
Из полученного решения видно, с ростом
времени t
скорость
стремится к своему максимальному
значению
.
Из полученного решения видно, с ростом
времени t
скорость
стремится к своему максимальному
значению
![]() ,
т.е. установившееся движение тела в
вязкой среде является равномерным.
,
т.е. установившееся движение тела в
вязкой среде является равномерным.
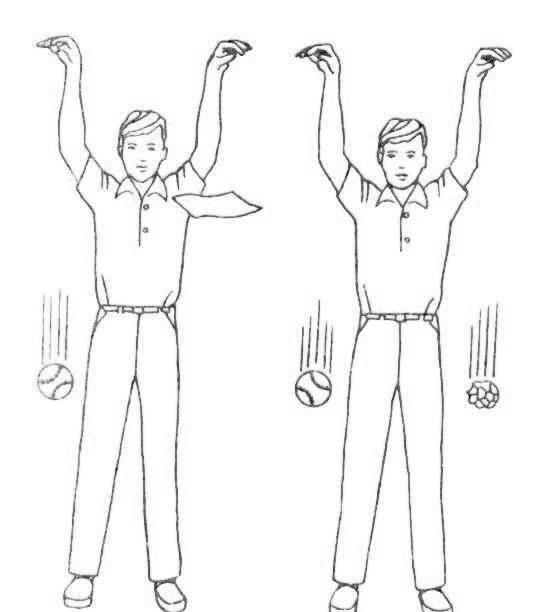
Рис.3. Демонстрационный эксперимент в физике
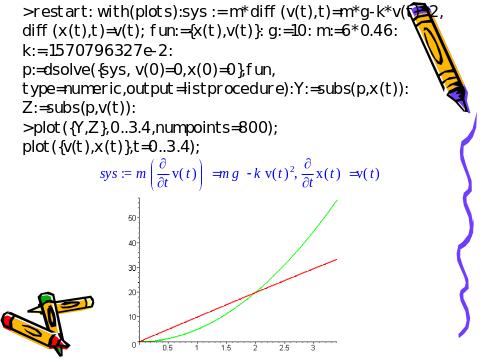
Слайд 9. Численное моделирование методом Рунге-Кутты 4-го порядка точности
Так как закон
изменения скорости известен, то, решая
обратную задачу кинематики
![]() ,
можно найти закон движения x(t)
по заданному начальному условию
x(0)=0.
,
можно найти закон движения x(t)
по заданному начальному условию
x(0)=0.
Решение задачи для квадратичной силы сопротивления приводится в учебном пособии [19]. Дифференциальное уравнение движения имеет вид:
![]() .
Решение представлено уравнениями:
.
Решение представлено уравнениями:

Интегрирование гиперболических функций в формулах представляет трудности для компьютера, поэтому воспользуемся численными методами (слайд 9).
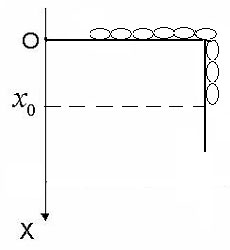
2.3 Цепная линия и метод кратных скобок Пуассона
Рассмотрим задачу. Однородная цепочка длиной l свисает на величину x0 c края горизонтального стола, по которому она может скользить без трения. Найти зависимость x(t), если v0=0.
Эта
задача имеет точное решение. Уравнение
движения цепочки записывается в виде:
![]()
Решение уравнения при x>l соответствует равноускоренному дви-жению:
![]() ,
,
где
t![]()
момент времени, в который вся цепочка
принимает вертикальное положение, а v1
ее скорость в этот момент времени.
момент времени, в который вся цепочка
принимает вертикальное положение, а v1
ее скорость в этот момент времени.
Далее
удобно ввести
![]() .
Общее решение уравнения движения при
.
Общее решение уравнения движения при
![]() записывается в виде:
записывается в виде:
![]() .
.
При
заданном начальном условии
![]() решение принимает вид:
решение принимает вид:
![]()
![]() где момент времени t1
определяется соотношением
где момент времени t1
определяется соотношением
![]() ,
а значение v1
определяется
следующим образом:
,
а значение v1
определяется
следующим образом:
![]() .
.
Интересно сопоставить это решение с решением, получаемым методом кратных скобок Пуассона в теоретической физике [7].
Записав функцию Гамильтона в виде:
![]()

 и
т. д.
и
т. д.
Рис.4. К определению гиперболических функций
В результате получим разложение:
![]() ,
,
которое
соответствует общему выражению при
произвольных начальных условиях:
![]()
![]() .
.
Тогда
![]()
![]() .
.
В
частности, при заданных в условии задачи
начальных условиях данное разложение
сводится к известному выражению для
гиперболического косинуса (цепной
линии)
![]() .
.
Данная задача особенно ценна для студентов, ибо подобная задача в более простой постановке, когда требуется определить скорость цепочки как функцию длины ее свисающего конца, традиционно предлагается на занятиях по физике в средней школе. Заметим, что процедура вычисления и суммирования кратных скобок Пуассона может быть автоматизирована в среде символьной математики [7].