

Опорные точки
В основе классификаций механизмов лежат качественные и количественные характеристики строения механизма и его движения.
Механизмы различают по виду движения звеньев, по виду траекторий точек звеньев, по различным свойствам звеньев, по виду звеньев и кинематических пар (геометрическим и конструктивным признакам), по функциональному назначению, по структуре кинематической цепи и т.д.
Контрольные вопросы
Какие механизмы называют рычажными?
В чем особенность зубчатой передачи и кулачкового механизма?
Что такое кулачок?


Основной энергетической машиной XIX в. была паровая машина. Какой передаточный механизм имел в это время наибольшее распространение на производстве? Что заменила паровая машина?
3.2. Плоские рычажные механизмы
З
Рис. 3.4. Схема шарнирного
четырехзвенника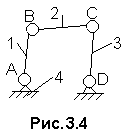
З
Рис.
3.5. Схемы
четырехзвенного рычажного механизма; а
– кривошипно-ползунного, б
– коромыслово-ползунного
Рис.
3.6. Схема
кулисного механизма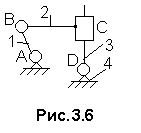
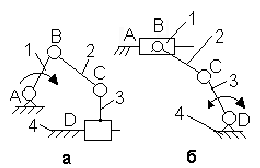 аменяя
в шарнирном четырех-звеннике одну
вращательную пару на поступательную,
можно получить механизмы двух видов.
Если поступательной сделать пару А или
D
(рис.3.5), то в механизме будет ползун,
звено образующее поступательную пару
со стойкой, а вращающееся звено в
зависимости от соотношения длин звеньев
будет кривошипом или коромыслом.
Соответственно механизм будет называться
кривошипно-ползунным
(рис. 3.5, а) или коромыслово-
ползунным (рис.3.5, б). Если
поступательной сделать пару В или С, то
в механизме будет кулиса,
звено рычажного механизма, вращающееся
вокруг неподвижной оси и образующее с
другим подвижным звеном поступательную
пару. Соответственно механизм (рис.3.6)
называется кулисным.
В зависимости от соотношения длин
звеньев кулиса может совершать полный
оборот (вращаться) или не совершать
(качаться). Звено 2, имеющее меньшую
протяженность элемента поступательной
пары, называется камнем.
Звено, имеющее большую протяженность
элемента поступательной пары, называется
направляющей.
аменяя
в шарнирном четырех-звеннике одну
вращательную пару на поступательную,
можно получить механизмы двух видов.
Если поступательной сделать пару А или
D
(рис.3.5), то в механизме будет ползун,
звено образующее поступательную пару
со стойкой, а вращающееся звено в
зависимости от соотношения длин звеньев
будет кривошипом или коромыслом.
Соответственно механизм будет называться
кривошипно-ползунным
(рис. 3.5, а) или коромыслово-
ползунным (рис.3.5, б). Если
поступательной сделать пару В или С, то
в механизме будет кулиса,
звено рычажного механизма, вращающееся
вокруг неподвижной оси и образующее с
другим подвижным звеном поступательную
пару. Соответственно механизм (рис.3.6)
называется кулисным.
В зависимости от соотношения длин
звеньев кулиса может совершать полный
оборот (вращаться) или не совершать
(качаться). Звено 2, имеющее меньшую
протяженность элемента поступательной
пары, называется камнем.
Звено, имеющее большую протяженность
элемента поступательной пары, называется
направляющей.
Особое место занимают клиновые механизмы, звенья которых образуют только поступательные пары.

Шарнирные механизмы впервые появляются в Европе в составе машин около XII века[12]. Исключительное значение для теории и практики применения шарнирных механизмов имело изобретение механизма для приближенного воспроизведения прямой линии. Это изобретение было совершенно необходимо для техники построения паровых машин конца XVIII века. Дело в том, что общепринятым приводом* пароатмосферных машин Ньюкомена (а затем и паровых машин Уатта) была передача через коромысло, качавшееся около некоторой точки закрепления. Один конец коромысла жестко соединялся с рабочим органом (шахтный насос для машин Ньюкомена), а второй – со штоком поршня. Шток теоретически должен был двигаться по прямой линии, конец коромысла – по дуге окружности. До тех пор, пока в зазор между поршнем и цилиндром машины легко проходил большой палец руки (известный инженер конца XVIII века Смитон сообщил один раз, что ему удалось добиться при изготовлении паровых машин высокой точности: большой палец руки проходил в зазор между цилиндром и поршнем с трудом), особого неудобства это не доставляло. Повысившаяся точность изготовления создала трудности с передачей движения. Изобретение Уаттом четырехзвенника, одна из шатунных точек которого приближенно описывала прямую линию, явилось удачным выходом из создавшегося положения. Недаром Уатт считал это изобретение одним из своих шедевров: «Хотя я и не особенно интересуюсь славой, но все же я горжусь своим прямилом больше, чем каким-либо другим своим изобретением по механической части».
