

Двумерные изображения кинематических пар в плоской структурной схеме механизма (плоские кинематические пары)
Название |
Число степеней свободы |
Вид контакта |
Вид относительного движения |
Условное обозначение изображения или его части |
Плоская одно-подвижная пара |
1 |
Линия,точки |
Вращательное |
|
Линия,точки |
Поступательное |
|
||
Точки,точка |
Плоское |
|
||
Плоская двухподвиж-ная пара |
2 |
Точка |
Плоское |
|

















И
збыточные
связи в плоской схеме механизма
(тангенциальные) появляются тогда, когда
в кинематической цепи имеются кинематически
пассивные
звенья
или плоские одноподвижные пары,
повторяющие наложенные ранее ограничения
на относительное движение звеньев.
Кинематически
пассивные звенья
соединяют
точки, расстояние между которыми в
механизме с абсолютно жесткими звеньями
не меняется, а к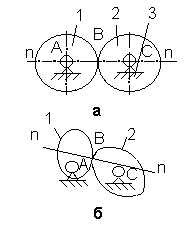 инематика
механизма сохраняется при отсутствии
этих звеньев (рис.2.4).
инематика
механизма сохраняется при отсутствии
этих звеньев (рис.2.4).
Р
Рис.
2.12. Схемы
механизмов: а
– фрикционного; б - кулачкового


Чтобы проверить, вносит ли плоская одноподвижная пара избыточную связь в замкнутый контур механизма, необходимо мысленно заменить ее плоской двухподвижной парой. Если после этого число степеней свободы механизма не изменится, то одноподвижная пара вносила избыточную связь. Например, центроидную пару В (рис 2.12,а) можно заменить плоским двухподвижным зубчатым сцеплением. При этом фрикционный механизм превратится в зубчатый.
П лоская схема не может полностью отразить работу механизма так же, как одна проекция не может полностью его изобразить. При анализе нормальных связей и степеней свободы, а также при мысленной сборке механизма плоский механизм необходимо рассматривать как трехмерный с указанием в пространственной структурной схеме действительных подвижных соединений, а не их изображений. В плоских механизмах нормальные контурные избыточные связи появляются только при сборке последней кинематической пары в замкнутом контуре механизма, когда повторяются связи подвижного звена и стойки. В плоских механизмах с низшими одноподвижными парами каждый замкнутый контур кинематической цепи содержит три нормальные избыточные связи.
В машиностроении часто применяются механизмы, отличающиеся от плоских наличием местных подвижностей, из-за которых точки отдельных звеньев имеют пространственные траектории движения (рис. 2.6, б). Такие механизмы называются квазиплоскими. Для исследования квазиплоских механизмов также применяют плоские и пространственные структурные схемы.