

2.1.Свойства связей
В
Рис.
2.1. Схема
кинематической пары шар-плоскость
Кроме геометрических связей, в механизмах могут быть дифференциальные (кинематические) связи, уравнения которых содержат координаты точек и производные от этих координат по времени (и, может быть, время). Если эти уравнения интегрируются, то дифференциальная связь приводится к геометрической. Дифференциальные интегрируемые и геометрические связи называются голономными связями. Дифференциальные связи, уравнения которых не могут быть проинтегрированы, являются неголономными связями. Неголономные связи появляются в кинематических парах при учете трения.
О
Рис.
2.2. Схема
фрикционного механизма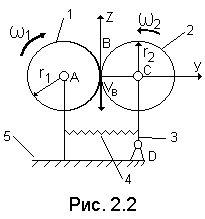
Интегрируя и принимая, что в начале φ1 = 0 и φ2 = 0, получаем
φ2 = φ1r1/r2. Полученное уравнение связи выражает зависимость между угловыми перемещениями колес и имеет вид геометрической связи. Известно, что передача движения во фрикционной передаче обусловлена упругим скольжением деформированных участков катков, поэтому приведенное уравнение связи можно рассматривать только как первое приближение к действительному. С учетом упругого скольжения φ2 = φ1r1 (1-£)/r2, где £ – коэффициент скольжения, зависящий от силы прижатия катков, материала катков и вида смазочного материала. Во втором приближении коэффициент скольжения £ считается постоянным (определяется опытным путем). Второе приближение оказывается достаточно точным в инженерных расчетах при оценке сил и прочности в передаче ('' Детали машин ''). Ввиду малости коэффициента £ (0,03…0,001) для кинематического анализа обычно достаточно и первого приближения. Связь, обусловленную трением между катками во фрикционной передаче, называют псевдокинематической 5.
Кроме голономной или неголономной связь может быть удерживающей или неудерживающей, стационарной или нестационарной. Связи, в уравнения которых время явно не входит, называют стационарными. В уравнение нестационарной связи время входит в явной форме. Удерживающими называют связи, при наличии которых для любого возможного перемещения точки механической системы противоположное ему перемещение также является возможным. Удерживающие связи описываются равенствами, а неудерживающие - неравенствами. Неудерживающие связи характерны для гибких звеньев, например, гибкие связи между звеньями 1 и 3 (рис.1.9, г) не препятствуют сближению звеньев, но делают невозможным противоположное относительное перемещение.
В курсе «Теория механизмов» рассматриваются механизмы с голономными, стационарными и удерживающими связями. В механизмах связи обычно действуют постоянно. Однако существуют механизмы переменной структуры, в которых связи, оставаясь стационарными, изменяются в какой-то момент времени. Например, в планетарной коробке скоростей из одного зубчатого механизма с несколькими степенями свободы путем включения элементов управления (муфт и тормозов) получают несколько различных по строению механизмов с одной степенью свободы. Другим примером механизма переменной структуры может служить рассмотренный ранее (рис.2.2) фрикционный механизм, в котором при недостаточной силе прижатия катков начинается буксование: входное звено вращается, а выходное - неподвижно.