

18.5. Перенесення проектної точки в натуру полярним способом та оцінка його точності
В цьому способі положення точки C находять на місцевості шляхом відкладення від напрямку АВ проектного кута і віддалі d
Спосіб полярних координат широко застосовують при перенесенні проекту в натуру і розмічуванні осей будівель, споруд і конструкцій. Основою для виконання цих робіт є пункти планової геодезичної мережі, які закріплені на місцевості і відомі їх прямокутні координати.
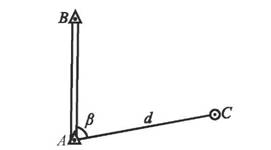
Рис.125. Схема полярного способу
(рис.125). Ці розмічувальні елементи обчислюють за відомими координатами точок А і В та проектної точки С, за методикою висвітленою в п.10.3. Кут ft обчислюють за дирекційними кутами визначених напрямків.
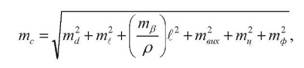
Середня квадратична похибка перенесення в натуру проектної точки С визначається за формулою
![]()
де твих - середня квадратична похибка вихідних даних;
md - середня квадратична похибка відкладення лінії d; тр - середня квадратична похибка вимірювання кута ; тф - середня квадратична похибка фіксації точки С.
18.6. Перенесення проектної точки в натуру способом перпендикулярів та оцінка його точності
Спосіб прямокутних координат застосовують в основному при наявності на майданчику або в цеху промислового підприємства будівельної сітки.
Розмічування проектної точки D (рис. 126) виконують за
допомогою обчислених віддалей d і { від найближчих пунктів сітки.
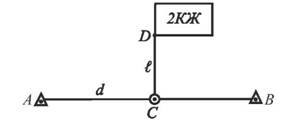
Рис.126. Схема способу перпендикулярів
Середня квадратична похибка положення точки C обчислюється за формулою:
де та і т2 - похибки відкладення віддалей відповідно d і -і ; тц - середня квадратична похибка центрування теодоліта в точці С.
18.7. Перенесення проектної точки в натуру способом кутової засічки та оцінка його точності
Спосіб кутової засічки застосовують для розмічування недоступних точок, або точок які знаходяться на значній віддалі від вихідних пунктів.
Положення на місцевості проектної точки С находять за допомогою відкладання кутів а і р на вихідних пунктах А і В (рис.127). Найкраще цей спосіб виконувати двома теодолітами одночасно, встановленими в точках А і В. Точка C буде знаходитись на перетині візирних осей теодолітів.
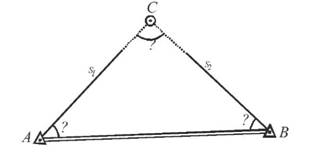
Рис.127. Схема способу кутової засічки
Середня квадратична похибка проектної точки C визначається за формулою
![]()
де т^ - середня квадратична похибка побудови кутів C і /.
18.8. Перенесення проектної точки в натуру способом лінійної засічки та оцінка його точності
Середня квадратична похибка положення точки c визначається за формулою

де тг - середня квадратична похибка вимірювання і і і і2;
![]()
Такий спосіб застосовують тоді, коли віддалі іі і І2 не перевищують довжини мірного приладу. Точка C визначається перетинами віддалей іі і І2 відкладених від точок А і В. Доцільно розмічування виконувати за допомогою двох мірних приладів (рис.128).
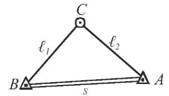
Рис. 128. Схема способу лінійної засічки
Камеральні і польові роботи при трасуванні лінійних споруд
19.1. Камеральне трасування осі лінійної споруди
Трасуванням називається комплекс інженерно-вишукувальних робіт, призначений для визначення положення лінійної смуги місцевості, яка відповідає всім технічним і економічним вимогам до побудови будь-якої лінійної споруди. Трасування поділяють на камеральне і польове.
Коли траса проектується за топографічним планом, або картою та матеріалами аерофотознімання місцевості, то трасування називають камеральним; якщо трасу визначають на місцевості, - то польовим.
Трасування розрізняють:
а) за висотними параметрами, коли головна увага приділяється забезпеченню допустимих ухилів траси (самопливні трубопроводи, канали);
б) за азимутальними параметрами, коли ухили місцевості мало впливають на проектування траси (напірні трубопроводи, лінії електропередач та зв'язку);
в) за висотно-азимутальними параметрами, (автомобільні і залізні дороги, судноплавні канали), де необхідно витримати допустимі ухили і правильне поєднання прямих і кривих ділянок тому, що вони є найбільш складними. В останньому випадку трасування виконують за змішаними параметрами.
Трасування в рівнинній місцевості. Положення траси в рівнинних районах визначається контурними перешкодами, тобто ситуацією. В цих випадках ухил місцевості менший допустимого, а тому намагаються мати пряму трасу, і виконують трасування за заданим напрямком. Проте, зустрічаються перешкоди, такі як водотоки, болота, великі яри, населені пункти, цінні сільськогосподарські угіддя і інші, які вимагають відхилення траси в той чи інший бік (рис. 129).
Кожний кут повороту дає деяке подовження траси. Для отримання найбільш короткої траси в рівнинних районах дотримуються наступних правил трасування:
1 .Трасу прокладають за прямою від одної контурної перешкоди до іншої (рис.129). Необхідність відхилення траси від прямої і призначення кута повороту повинні бути обґрунтовані.
Рис. 129. До правила трасування
Вершини кутів повороту вибирають напроти середини перешкоди з таким розрахунком, щоб траса огинала цю перешкоду.
Кути повороту прагнуть призначати по можливості не більше 200-300, щоб помітно не подовжувати трасу.
Трасування є гірській місцевості. Положення траси в гірських районах визначається висотними перешкодами, тобто рельєфом. Оскільки ухили гірської місцевості значно перевищують допустимі ухили траси, то трасування виконують "потуженим ходом", коли кожна лінія задається граничним ухилом. Щоб витримати такий ухил, штучно подовжують трасу, відхиляючи її на великі кути від прямої. Тому в гірських умовах траса в плані має складну конфігурацію.
Таким чином, при трасуванні в гірських умовах дотримуються наступних правил:
Трасу проектують з граничним ухилом, дотримуючись лінії нульових робіт. Ухил зменшують (або приймають рівним нулю) на окремих ділянках, заданих технічними умовами.
Елементи плану траси і висоти характерних точок осі лінійної споруди підбирають з урахуванням заздалегідь складеного профілю і вимог поєднання кривих і прямих.
3. Кути повороту і їх величини призначають, виходячи із умов збереження ухилу трасування; при цьому прагнуть уникнути малих радіусів кривих, на яких необхідне значне зменшення допустимого ухилу