

8.4. Вимірювання горизонтальних кутів способом кругових прийомів
Цей спосіб застосовується тоді, коли на точці потрібно спостерігати три і більше напрямків (рис.59). У вершині кутів встановлюють теодоліт і приводять його в робоче положення. На горизонтальному крузі установлюють відлік приблизно рівний 0°02' чи 0°01'. Відкріплюють лімб і наводять зорову трубу при КЛ на початкову точку, наприклад В. Закріплюють лімб і беруть відлік з горизонтального круга ав. Відкріплюють закріпний гвинт алідади горизонтального круга і зорову трубу наводять на точку C та знімають відлік ас. Аналогічно по черзі наводять трубу на решту точок за ходом годинникової стрілки і беруть відповідно відліки ad, ае, af і знову знімають відлік ag на точку В. Цей відлік називають замиканням горизонту.

Рис.59. Схема вимірювання горизонтальних кутів способом прийомів
Результати спостережень записують в журнал вимірювання горизонтальних кутів способом кругових прийомів (табл.6).
Журнал
вимірювання горизонтальних кутів способом кругових прийомів
Станція |
Точки візування |
Відліки по ГК |
C = (КЛ - КП +180)/2 (колімація) |
Середнє значення відліків при КЛ |
Приведений напрямок при КЛ |
О Г
КЛ
о ,
КП
° ,
А
В
0°01.0'
180°00'
+ 0,5'
0°00,75' 0°00,5'
0°00 . 0'
C
64°54,5'
244°55,5'
- 0,5'
64°55,0'
54°54,25'
D
126°18,0'
306°19,0'
- 0,5'
126°18,5'
126°17,75'
Е
192°39,5'
12°40,5'
- 0,5'
192°40,0'
192°39,25'
F
297°22,0'
117°21,0'
+ 0,5'
297°21 ,5'
297°20,75'
В
0°01 , 5 '
180°00,5'
+ 0,5'
0°01 ,0'
0°00 , 0'
Переводять трубу через зеніт і при КП наводять на точку В, беруть відлік і записують його в журнал. Після цього спостерігають по черзі точки проти годинникової стрілки, тобто, F, Е, D, C і В. Обчислюють колімаційну похибку. Якщо значення колімаційних похибок на даній станції відрізняються не більше ±1', то вираховують середнє значення із відліків КЛ і КП, але градуси залишають ті які є при КЛ. Середнє значення беруть тільки із мінут і їх десятих.
Для того щоб одержати приведені напрямки, то вираховують постійне число як середнє значення відліків на початкову точку В і відліку при замиканні горизонту на цю саму точку В. В нашому випадку це середнє число рівне 0,75', яке записують вище відліку на точку В і підкреслюють його. Від кожного середнього відліку віднімають це постійне число і отримують приведенні напрямки. По цих приведених напрямках обчислюють будь-які горизонтальні кути, тобто, від правого напрямку віднімають відлік лівого напрямку.
Будова і перевірки нівелірів
9.1. Будова нівеліра н-3
В розробці конструкції нівелірів за останній час відбулися значні зміни. Нівеліри позначають буквою H і цифрою поряд яка вказує на відповідний клас нівелювання даним нівеліром. Технічна характеристика нівелірів приведена в табл.7.
Н-3 - точний нівелір з циліндричним рівнем і елеваційним гвинтом. Середня квадратична похибка визначення висоти точки на 1 км ходу складає не більше 4 мм;
НС-3 - точний нівелір з самовстановлюючою лінією візування. Середня квадратична похибка визначення висоти точки на 1 км ходу становить не більше 4 мм.
Нівелір Н-3 (рис. 60, а) складається із двох основних частин: підставки (тригера), в якій повертається циліндрична вісь, і горизонтальної опорної площадки із зоровою трубою 1 з внутрішнім фокусуванням і збільшенням 30 х. Фокусування труби виконується при допомозі кремальєри 2. До труби прикріплений контактний циліндричний рівень і закритий металевою кришкою. Елеваційний гвинт 6, служить для приведення кінців бульбашки циліндричного рівня в контакт. Зображення кінців бульбашки через систему призм 1, 1' , 2 і лінзи 3 та передається в поле зору труби. Завдяки лінзі в полі зору труби нівеліра видно одночасно обидва кінці рівня, розрізаного за вертикальною віссю (рис. 61).
Перед тим, як зняти відлік з рейки повертають в ту чи іншу сторону елеваційний гвинт і добиваються суміщення його кінців (приводять в контакт). Завдяки цьому візирна вісь зорової труби приводиться в горизонтальне положення. Після цього спостерігач знімає відліки з рейки. Нівелір Н-3 є малогабаритним і вагою 2 кг без футляра. Він має закріпний гвинт 3 і мікрометричний гвинт 4 та круглий рівень 5 для приведення його в робоче положення.

Технічні характеристики нівелірів
На рис.60, а приведено поле зору труби де чітко видно рейку з поділками. Кожний дециметр підписаний. Відліки з рейки знімають за середньою ниткою сітки ниток труби. Відлік з рейки - це кількість ділень рейки які відлічені від нуля рейки до середньої нитки сітки ниток труби. Оскільки труба нівеліра показує обернене зображення предмету, то та кількість ділень, яка є в полі зору труби зверху до середньої нитки називається відліком з рейки. В нашому випадку відлік становить1250 мм. Кожна поділка на рейці дорівнює 10 мм, а людина здатна визначати на око десяту її частини.

Рис.60. Нівеліри: а) - Н-3 і поле зору його труби; б) - Н-3К; в) - Н - 10КЛ: 1 -окуляр; 2 -дзеркало; 3 - корпус; 4 - навідний гвинт; 5 - горизонтальний круг
Нівелір Н-3К (рис. 60, б) має пристрій для автоматичного приведення візирної осі в горизонтальне положення при нахиленому приладі в границях 15' . Підставка 1 зорової труби не має закріпного гвинта, точне наведення труби на рейку виконують мікрометерним гвинтом 2. Вісь обертання приладу приводиться в прямовисне положення за допомогою круглого рівня 3.

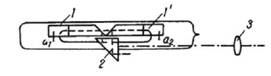
Рис.61. Контактний рівень з призмовою системою: а) поділ рівня на дві частини ; б) приведення половинок рівня в контакт.
Нівелір Н-10КЛ (рис. 60, в) має оптико-механічний компенсатор. Зорова труба показує пряме зображення. Навідний гвинт труби відсутній. В нижній частині нівеліра розташований лімб із нанесеною шкалою і оцифрованою через 1о , що збільшує можливості застосування нівеліра при рішенні різноманітних інженерних задач на будівництві.