

Тема 9.3: «Тахогенератори постійного струму»
Служать для вимірювання частоти обертання по величині вихідної напруги, а також отримання електричних сигналів, пропорційних частоті обертання валу в схемах автоматичного регулювання.
Тахогенератор є генератором малої потужності з електромагнітним незалежним збудженням або збудженням постійними магнітами. Ввід того що при постійній величині струму збудження Iв = соnst магнітний потік Ф практично не залежить від навантаження, вихідна Е.Р.С. тахогенератора прямо пропорційна частоті обертання :
1
1 Е вих = СеФ n = Се n, (1 )
де Се = Се при Ф = соnst.
Вираз (1) справедливий і для тахогенератора із збудженням постійними магнітами, де Ф= соnst.
Для вимірювання частоти обертання тахогенератором вал останнього механічно сполучають з валом механізму, частоту якого вимагається зміряти. На виводи тахогенератора підключають вимірювальний прилад з шкалою, градуйованою в одиницях частоти обертання ( об / хв).
Вихідна характеристика практично не прямолінійна. Основні причини порушення лінійної залежності U вих= f ( n ) - це реакція якоря і падіння напруги в щітковому контакті. Відхилення складає 0,5 - 3 %.
Тема 9.4: «Елементи дистанційних передач»
Система дистанційної передачі показаників звичайно містить у собі три елементи: датчик (перетворювач); провідну лінію зв'язку; приймач.
Приймач перетворить сигнал від датчика в переміщення вказівного, що сигналізує або регулює орган.
Прикладами систем дистанційної передачі показань можуть служити:
-сельсини; -ферродинамічна система.
Сельсина система дистанційної передачі містить два однакових елементи - сельсин - датчик (СД) і сельсин -приймач (СП).
Ця система служить для передачі кутів повороту або лінійних переміщень.
Сельсин звичайно являє собою малогабаритну електричну машину з трьома роторними обмотками й одною обмоткою збудження, яка розміщується на статорі. Роторні обмотки розміщаються зі здвигом у просторі на кут 120 град. і з'єднуються в зірку, створюючи одну роторну синхронізуючу обмотку. Підвід струму до роторної обмотки здійснюється через контактні кільця.
Сельсинами називаються спеціальні електричні машини змінного струму, які залежно від того, які включені їх і роторних обмотки статорів, можуть працювати як датчики або як елементи дистанційної передачі.
Датчиками є сельсини, працюючі в трансформаторному режимі. У дистанційних передачах використовуються сельсини, працюючі в індикаторному режимі. Крім того, існують так звані диференціальні сельсини, які застосовуються як в сельсинних датчиках, так і в дистанційних передачах.
Відповідно для дистанційної передачі кутів повороту застосовуються дві схеми вмикання сельсинів: індикаторна та трансформаторна.
Сельсини, працюючі в трансформаторному або індикаторному режимі, мають по чотири обмотки.
Три обмотки з'єднуються у зірку і мають магнітні осі, зсунуті один щодо одного на 120°. Сукупність трьох розташованих таким чином обмоток звичайно називають трифазною обмоткою.
Якщо трифазна обмотка розташовується на статорі, то четверта однофазна обмотка розташовується на роторі, і навпаки.
Перший варіант застосовується в малопотужних сельсинах, другий — в сельсинах великій потужності.
По типу струму підводу до ротора сельсини діляться на контактні і безконтактні, останні розділяються на неявно - і явно полюсові.
На рис. 1 наведена схема неявно полюсного сельсина з кільцевим трансформатором.
У системах синхронної передачі сельсини збуджуються однофазним змінним струмом, тому в кожному із сельсинів незалежно від його функцій утвориться пульсуючий магнітний потік, що відображає в обмотках синхронізації трансформаторну електрорушійну силу (Е.Р.С), пропорційну косинусу кута між віссю фази обмотки синхронізації і напрямком магнітного потоку. Е. р. с. на затискачах обмотки синхронізації виходить як різниця відповідних фазних е. р. с.:
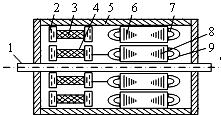
Рис.1. Безконтактний неявно полюсний сельсин з кільцевим трансформатором. 1 - вал ротора; 2 – магніто провід кільцеві трансформатори (КТ); З – первинна обмотка КТ; 4 - вторинна обмотка КТ; 5 - корпус; 6 - пакет статора; 7 - обмотка синхронізації; 8 - пакет ротора; 9 - обмотка збудження.
Звичайно сельсини застосовуються попарно. Один називається сельсином-датчиком (СД), а інший — сельсином - приймачем (СП).
На рис. 2 показані сельсини, працюючі в трансформаторному режимі.
При роботі сельсинної дистанційної системи в трансформаторному режимі ротор СП фіксується в довільному положенні жорстко. До статорної обмотки СД підводиться живлююча перемінна напруга, а статорна обмотка СП є вихідною. Кут повороту ротора СД є вхідною величиною системи, а вихідний - напруга U вих, що знімається зі статорной обмотки СП. Воно залежить від різниці кутів повороту роторів СД і СП таким чином:
U вих =Um cos ( -) ,
де Um- максимальне значення U вих;
- кут повороту ротора СД;
- кут повороту ротора СД;
Статорами є однофазні обмотки. Роторні обмотки СД сполучені з відповідними обмотками ротора СП. На обмотку статора СД подається змінний струм. Кінці обмотки статора СП виведені до вихідних клем. Пара включених таким чином сельсинів є датчиком, що перетворює кутове переміщення ротора СД в електричний сигнал, що знімається з обмотки статора СП. Вхідним сигналом датчика є кут повороту ротора СД щодо ротора СП, тобто різниця в кутових положеннях роторів. Вихідним сигналом є напруга, що наводиться в обмотці статора СП.
Для висновку наближеної формули для вихідної напруги СП нехтуватимемо активними опорами обмоток, враховуючи, що вони малі в порівнянні з їх реактивними опорами. Крім того, нехтуватимемо Е.Р.С самоіндукції і Е.Р.С взаємо індукції обмоток, оскільки сума цих Е.Р.С мала в порівнянні з Е.Р.С, наведеної в обмотці потоком збудження. Тоді ефективні значення Е.Р.С у обмотках ротора визначаться формулами
![]() (1.1)
(1.1)
де
![]() —
ефективне значення
Е.Р.С,
що наводиться в обмотці 1
потоком
збудження при
—
ефективне значення
Е.Р.С,
що наводиться в обмотці 1
потоком
збудження при
![]() .
Позначимо через Z
опір
кожної фазової обмотки ротора, вважаючи,
що вони однакові. Тоді,
якщо нехтувати опором сполучних дротів
і
врахувати, що взаємний вплив обмоток
роторів, розташованих на великому
віддаленні один від одного, відсутній,
а магніто проводи сельсинів
працюють в ненасиченому режимі, то
ефективні значення
струмів у фазових обмотках виразяться
формулами
.
Позначимо через Z
опір
кожної фазової обмотки ротора, вважаючи,
що вони однакові. Тоді,
якщо нехтувати опором сполучних дротів
і
врахувати, що взаємний вплив обмоток
роторів, розташованих на великому
віддаленні один від одного, відсутній,
а магніто проводи сельсинів
працюють в ненасиченому режимі, то
ефективні значення
струмів у фазових обмотках виразяться
формулами
![]() (1.2)
(1.2)
Ці струми створюють змінні магнітні потоки, які в однофазній обмотці статора СП індукуватимуть електрорушійні сили, ефективні значення яких відповідно рівні
![]() (1.3)
де
(1.3)
де
![]() — коефіцієнт пропорційності. Ефективне
значення вихідної
напруги сельсина приймача буде рівне
— коефіцієнт пропорційності. Ефективне
значення вихідної
напруги сельсина приймача буде рівне
![]() (1.4)
(1.4)
Підставляючи сюди вирази (1.3) і враховуючи (1.2) і (1.1), одержимо
![]()
або, після тригонометричних перетворень,
![]() (1.5)
(1.5)
де
![]() —
амплітудне значення напруги при нульовому
роз узгодженні
—
амплітудне значення напруги при нульовому
роз узгодженні
![]() .
Ця
формула показує, що напруга на вихідних
клемах
сельсинного датчика не
залежить
від
абсолютного кутового
положення
роторів,
а залежить
тільки
від
їх
відносного
кутового
положення. Якщо положення ротора
сельсина-приймача зафіксувати, то по
величині
.
Ця
формула показує, що напруга на вихідних
клемах
сельсинного датчика не
залежить
від
абсолютного кутового
положення
роторів,
а залежить
тільки
від
їх
відносного
кутового
положення. Якщо положення ротора
сельсина-приймача зафіксувати, то по
величині
![]() можна
судити про кут повороту ротора
сельсина-датчика.
При фіксованому
значенні
можна
судити про кут повороту ротора
сельсина-датчика.
При фіксованому
значенні
![]() вихідна
напруга
сельсинного датчика буде пропорційна
вихідна
напруга
сельсинного датчика буде пропорційна
![]() .
При малих
кутах
.
При малих
кутах
![]() можна
вважати
пропорційним
.
можна
вважати
пропорційним
.
На рис. 3 показані сельсини СД і СП, працюючі в індикаторному режимі. На відміну від сельсинів, працюючих в трансформаторному режимі, тут однофазна обмотка статора СП, так само як і обмотка статора СД, підключена до джерела змінного струму. Положення ротора СП не фіксується, він може вільно обертатися на своїй осі.
Змінна
напруга живлення створює в однофазних
обмотках статорів обох сельсинів
магнітні потоки,
напрямки
яких співпадають з напрямками осей
обмоток статорів.
Ці
магнітні потоки відображають
у
фазових обмотках роторів електрорушійні
сили. При однаковому положенні роторів
СД
і
СП
по
відношенню до обмоток
![]() статорів ці
Е.Р.С
у відповідних фазових обмотках рівні
між собою і протилежні по
напряму. Отже, результуючі Е.Р.С
у кожній парі сполучених між собою
фазових обмоток рівні нулю і струм в
ланцюгах роторів відсутній
статорів ці
Е.Р.С
у відповідних фазових обмотках рівні
між собою і протилежні по
напряму. Отже, результуючі Е.Р.С
у кожній парі сполучених між собою
фазових обмоток рівні нулю і струм в
ланцюгах роторів відсутній
![]() .
Якщо
ж ротор СД
повернений
на деякий кут щодо ротора
СП,
то
Е.Р.С.
у відповідних фазових обмотках роторів
опиняться
різними по величині. Результуючі Е.Р.С
у
фазових обмотках роторів не будуть
рівні нулю, і в ланцюзі роторів виникнуть
струми
.
Якщо
ж ротор СД
повернений
на деякий кут щодо ротора
СП,
то
Е.Р.С.
у відповідних фазових обмотках роторів
опиняться
різними по величині. Результуючі Е.Р.С
у
фазових обмотках роторів не будуть
рівні нулю, і в ланцюзі роторів виникнуть
струми
![]() .
Взаємодія результуючих магнітних
потоків роторів з магнітними потоками
обмоток статорів
створює обертаючі моменти. Тому, якщо
ротор СД
після
розвороту на заданий кут
зупинити, то ротор СП
під
дією обертаючого моменту обертатиметься
до тих пір, поки не стане
в положення
.
Взаємодія результуючих магнітних
потоків роторів з магнітними потоками
обмоток статорів
створює обертаючі моменти. Тому, якщо
ротор СД
після
розвороту на заданий кут
зупинити, то ротор СП
під
дією обертаючого моменту обертатиметься
до тих пір, поки не стане
в положення
![]() .
При безперервному обертанні ротора СД
з
певною швидкістю ротор СП
обертатиметься
з тією ж швидкістю
і стежитиме за ротором СД.
Обертаючий
момент забезпечує синхронність
руху роторів, тому його називають
синхронізуючим
моментом.
.
При безперервному обертанні ротора СД
з
певною швидкістю ротор СП
обертатиметься
з тією ж швидкістю
і стежитиме за ротором СД.
Обертаючий
момент забезпечує синхронність
руху роторів, тому його називають
синхронізуючим
моментом.
По аналогії з (1.1) для фазових обмоток ротора сельсина-приймача, що працює в індикаторному режимі, можна записати
![]() (1.6)
(1.6)
Ефективні значення результуючих Е.Р.С у обмотках роторів будуть рівні
![]() (1.7)
(1.7)
Після підстановки сюди виразів (1.1) і (1.6) і тригонометричних перетворень одержимо
![]() (1.8)
(1.8)
Звідси витікає, що результуючі Е.Р.С одночасно звертаються в нуль лише у випадку, тобто при однаковому положенні роторів СД і СП.
Результуючий
магнітний потік має складову,
направлену по осі обмотки (подовжня
складова) статора, і складову,
перпендикулярну осі обмотки статора
(поперечна
складова). Подовжня складова ослабляє
магнітний
потік обмотки статора, але не створює
обертаючого моменту.
При малих
кутах роз узгодження
![]() вплив
подовжньої
складової незначний. Поперечна складова
створює
синхронізуючий момент. Величина
синхронізуючого моменту
визначається формулою
вплив
подовжньої
складової незначний. Поперечна складова
створює
синхронізуючий момент. Величина
синхронізуючого моменту
визначається формулою
![]() (1.9)
(1.9)
де
![]() ,
,
![]() —
момент, діючий на ротор СП
при
роз
узгодженні
—
момент, діючий на ротор СП
при
роз
узгодженні
![]() ,
рівному
,
рівному
![]() .
.
На
ротор СД
діятиме
момент, також рівний
![]() оскільки
обмотки роторів однакові і величини
струмів, поточних по відповідних
обмотках роторів, однакові; але знак
цього моменту
буде протилежним, оскільки напрями
струмів у
відповідних обмотках протилежні.
оскільки
обмотки роторів однакові і величини
струмів, поточних по відповідних
обмотках роторів, однакові; але знак
цього моменту
буде протилежним, оскільки напрями
струмів у
відповідних обмотках протилежні.
Формула
(1.9) показує, що синхронізуючий момент
рівний нулю при
= 0° і
= 180°, тобто в межах зміни
від
0° до 360° в системі можливі два стани
рівноваги. Проте при
=
180° положень ротора СП нестійкі,
оскільки при будь-якому
![]() момент,
діючий на ротор приймача, збільшує
момент,
діючий на ротор приймача, збільшує
![]() і
зменшує
при
і
зменшує
при
![]() і
навпаки при
і
навпаки при
![]() .
.
Практично
унаслідок наявності моментів тертя в
підшипниках і
контактних кільцях, моменту навантаження,
неточного балансування роторів,
неоднаковості конструктивних і
електричних параметрів
СД
і
СП
і
інших чинників рівноважний стан
сельсинної
системи наступає при
![]() ,
тобто стеження ротора СП
за
ротором
СД
відбувається
з
деякою помилкою. Помилка стеження
звичайно
визначається експериментально і для
сельсинів першого і
другого класів точності не перевершує
1,5°. Помилка може бути
значно зменшена, якщо вхідний сигнал
подається в сельсину
систему через редуктор, а вихідний
сигнал знімається за
допомогою такого ж редуктора.
,
тобто стеження ротора СП
за
ротором
СД
відбувається
з
деякою помилкою. Помилка стеження
звичайно
визначається експериментально і для
сельсинів першого і
другого класів точності не перевершує
1,5°. Помилка може бути
значно зменшена, якщо вхідний сигнал
подається в сельсину
систему через редуктор, а вихідний
сигнал знімається за
допомогою такого ж редуктора.
Помітимо, що висновки, одержані для випадку, коли однофазні обмотки розташовані на статорах СП і СД, залишаються у силі і для випадку, коли однофазні обмотки розташовані на роторах.