

Асинхронний тахогенератор
Принцип дії. Конструкція асинхронного тахогенератора аналогічна конструкції виконавчого асинхронного двигуна з порожнистим немагнітним ротором. На статорі в пазах укладені дві обмотки, зсунуті в просторі на 90. Одна з обмоток В (збудження) постійно включена в мережу, інша обмотка Г (генераторна) приєднана до навантаження Zн, тобто є вихідною.
По обмотці В проходить змінний струм, внаслідок чого створюється магнітний потік Фd, пульсуючий з частотою мережі f1.Этот потік розподілений в просторі практично синусоїдально і його вісь співпадає з віссю обмотки збудження В (мал. 7.12,а), званою подовжньою віссю d-d . Відповідно потік, створюваний обмоткою збудження, називають
Поперечної. Розглянемо, які ЕРС і струми виникають в асинхронному тахогенераторе при нерухомому і обертається роторі.
При нерухомому роторі магнітний потік Фd пронизує обмотку збудження. В, індукція в ній ЕРС
ЕВ = 4,44F1 WB KОБ.В Фdm
Де WB, kоб.в - число витків і обмотувальний коефіцієнт обмотки збудження.
Нехтуючи активним опором обмотки збудження і індуктивним опором, обумовленим потоком розсіяння, для обмотки збудження можна записати UВ+ЕВ=0.
У ідеальному випадку в обмотці Г подовжній потік Фd не індукує ЕРС, оскільки обмотка Г зсунута щодо обмотки В на 90°. Отже, при п=0 і напруга на навантаженні рівна нулю. Проте практично точної магнітної симетрії осей вказаних обмоток досягти неможливо, тому частина потоку Фd виявляється трансформаторний пов'язаною з обмоткою Г і індукує в ній деяку ЕРС, звану залишковою.
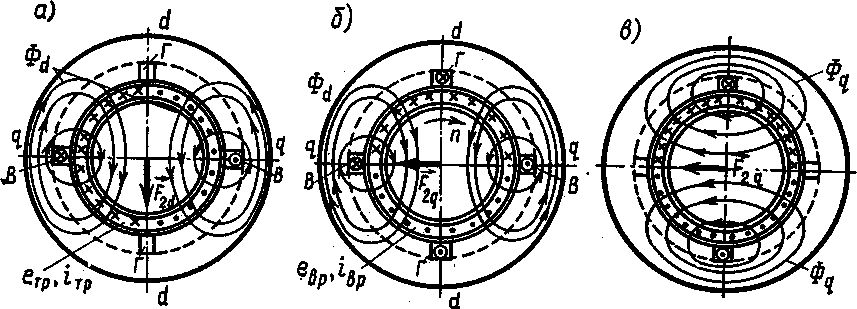
Мал. 7.12. Характер розподілу ЕРС і струмів, індукованих в порожнистому роторі
Порожнистий ротор можна представити сукупністю ряду «елементарних провідників». У кожному такому провіднику пульсуючий потік індукує ЕРС етр, звану трансформаторною. Оскільки активний опір порожнистого ротора у багато разів більше індуктивного, то ЕРС етр і що викликається нею в роторі струм iтр практично співпадають по фазі. При цій умові створювана струмом iтр МРС ротора F2d діє по подовжній осі машини при нерухомому і обертається роторі. На мал. 7.12, а показаний напрям ЕРС етр, струму iтр і МРС F2d у момент часу, коли потік Фd зменшується. Оскільки для обмотки збудження справедлива умова UВ+ЕВ=0, то при виникненні подовжньої МРС ротора F2d в обмотці збудження з'являється компенсуючий струм (аналогічно тому, як в трансформаторі), МРС Fbd якого компенсує дія МРС F2d .
При обертанні ротора яким-небудь стороннім механізмом в його елементарних провідниках крім трансформаторної ЕРС етр індукується ще і ЕРС обертання еВр=Bx l2 v2, де Bx - індукція в даній точці повітряного зазору в дану мить ; l2- довжина ротора в магнітному полі; v2- окружна швидкість ротора.
Оскільки потік Фd пульсує в часі з частотою мережі f1, то і Індуковані їм ЕРС евр також пульсують з цією ж частотою. При синусоїдальному розподілі індукції Вх уздовж кола ротора максимальне значення ЕРС евр у будь-який момент часу досягається в елементарному провіднику, розташованому по продольній осі машини.
На мал. 7.12,6 показані миттєві напрями ЕРС обертання евр і створюваних нею торсів iвр в елементарних провідниках порожнистого ротора.
Слідує підкреслити, що при будь-якій частоті обертання напрям цієї ЕРС в елементах ротора, розташованих по обидві сторони поперечної осі,
протилежне. Якщо нехтувати індуктивним опором порожнистого ротора, то напрям струму iвр в кожному елементі співпадає з напрямом ЕРС евр. При цій умові струми ротора iвр співпадають МРС F2q і пульсуючий магнітний потік Фq, які направлені по поперечній осі q-q(мал. 7.12, в). Потік Фq не зчеплений безпосередньо з обмоткою збудження; у вихідний
обмотці Г він індукує
ЕГ = 4,44f1 WГ kОБ.Г Фdm
Где WГ , kОБ.Г —число витків і обмотувальний коефіцієнт вихідної обмотки.
Частота зміни ЕРС у вихідній обмотці не залежить від частоти обертання ротора і за будь-яких умов рівна частоті зміни ЕДС евр в роторі, тобто частоті мережі f1 живлячої обмотку збудження. Незмінність частоти вихідної напруги є цінною властивістю асинхронного тахогенератора.
Розглянемо, як зв'язана ЕРС ЕГ у вихідній обмотці з частотою обертання ротора. Згідно (7.7), вона пропорційна поперечному потоку
Фdm= F2q/Rmq,
де F2q- максимальне значення МРС ротора по поперечній осі;
Rmq - магнітний опір машини по цій осі.
У асинхронній машині з порожнистим немагнітним ротором ефективний повітряний зазор дуже великий, тому магнітний опір Rmq є практично незмінним (магнітний опір сталевих ділянок нехтує мало). Отже, магнітний потік по поперечній осі практично пропорційний МРС Fmq, яка, у свою чергу, пропорційна струму iвр і ЕРС обертання евр ротора. Проте ЕРС обертання прямо пропорційна потоку Фd і частоті обертання ротора п2 тому за відсутності насичення магнітної системи
Uвих =ЕГ=c1f1Фqm v2=c3n2 ,
Де с1…с3 - постійні.
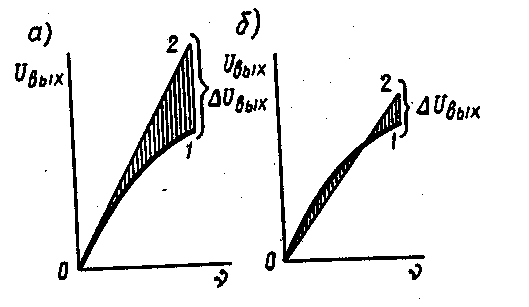
Таким чином, в тому, що ідеалізується тахогенераторе (при прийнятих допущеннях) ЕРС у вихідній обмотці прямо пропорційна частоті обертання ротора. Іншими словами, його вихідна характеристика Uвих= f (v) є лінійною (мал. 7.13,а,кривая 2). У реальних умовах роботи тахогенератора вказана характеристика відхиляється від лінійної залежності (крива 1), тобто з'являється амплітудна погрішність UВиХ .
Амплітудну погрішність можна зменшити шляхом відповідного калібрування тахогенератора. Під калібруванням розуміється встановлення такого нахилу ідеальної характеристики тахогенератора (мал. 7.13,б, крива 2), при якому відхилення в середньому від реальної характеристики 1 мінімальне.