

Лекція 9
Тема 9.1: «Датчики швидкості»
Для контролю швидкості обертання частіше усього використовують тахогенератори, що безпосередньо перетворюють швидкість механічного обертання в електричний сигнал ( напруга).
Тахогенератор являє собою малогабаритну електричну машину, яка працює в режимі генератора.
При обертанні ротора тахогенератора його постійний магнітний потік перетинає обмотку статора і индуктирує у ній Е.Р.С. (Е), значення якої визначається таким чином:
Е= 4,44 KwfnФmax=4,44w pvnФмах/60,
де f-частота Е.Р.С.;
p-число пар полюсів обмотки статора;
n- число витків обмотки статора;
Ф мах -амплітудне значення магнітного потоку;
v- швидкість обертання ротора.
У залежності від виду вихідного сигналу тахогенератори діляться на два класи :
- тахогенератори постійного струму;
- тахогенератори перемінного струму.
Перевагою тахогенераторів перемінного струму є відсутність рухливих електричних контактів (щіток ).
Основні типи тахогенераторов показані схематично на мал.
Ротор синхронного універсального тахогенератора (мал.а), являє собою постійний магніт, поле якого перетинає вихідну обмотку, розміщену на статорі на магнітомагнітного матеріалі.
При обертанні ротора в обмотці индуктируєтся Е.Р.С., амплітуда і частота якої пропорційні швидкості його обертання.
синхроний тахогенератор.
На ( мал. б) показана схема тахогенератора постійного струму.

б)
У магнітному полі, утворюваною обмоткою збудження ОЗ, обертається якір з обмоткою, сполученої з колектором.
Напруга між щітками пропорційна швидкості обертання якоря. Щоб послабити залежність вихідного сигналу від розміру струму збудження система такого тахогенератора виконується насиченою. Магнітне поле може також створюватися за допомогою постійних магнітів. При цьому температурна похибка тахогенератора утворюється меншою.
Загальним недоліком тахогенераторів постійного струму є високий рівень шумів, а також пульсації вихідної напруги.
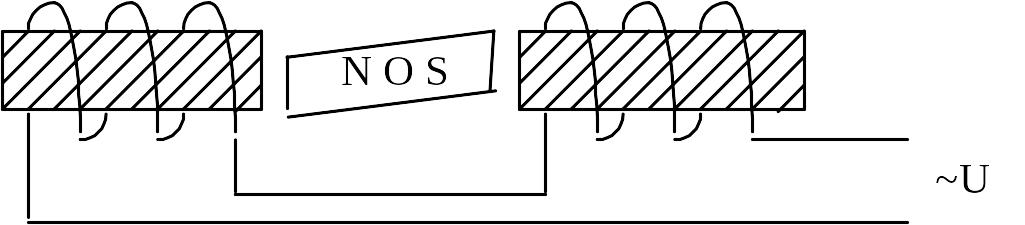
Ротор асинхронного тахогенератора, показаного на (мал.в), виконаний у виді полого провідного циліндра. До обмотки статора W1
в) асинхроний тахогенератор.
підведена змінна напруга живлення U1, а вихідна обмотка W2 розташована під кутом 90 град. до обмотки W1. При обертанні ротора в полі, утворюваного обмоткою W1, у ньому индуктуються вихрові струми у свою чергу що индуктирують е.д.с. в обмотці W2.
У асинхронних тахогенераторів частота вихідного сигналу, на відміну від синхронного тахогенератора, не залежать від швидкості обертання ротора і дорівнює частоті живленої напруги U1.
Амплітуда вихідного сигналу при постійній частоті й амплітуді живленої напруги, пропорційна швидкості обертання ротора.
При зміні напрямку обертання ротора фаза вихідного сигналу змінюється на 180 град. Точність і чутливість асинхронних тахогенераторів ростуть з підвищенням частоти живленої напруги. Недоліками їх є мала потужність вихідного сигналу і залежність його від якості живлення мережі.