

1.5. Уравнения движения гироскопа в кардановом подвесе
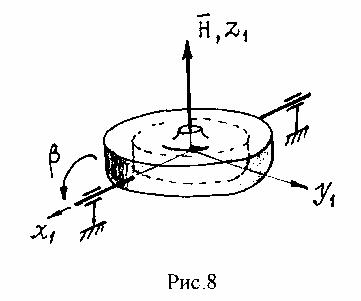
Приведенные выше результаты необходимо уточнить, для чего, в частности, необхо- димо учесть наличие подвеса гироскопа. Очевидно, что без подвеса практическое ис- пользоёвание гироскопа невозможно, а подвес участвует в движении гироскопа. В качест- ве подвеса на практике используют двух-, трехстепенной и трехстепенной с дополнитель- ной рамкой кардановы подвесы в зависимости от назначения прибора, которым определя- ется требуемое число степеней свободы гироскопа. Одна из степеней свободы, связанная с собственным вращением, реализуется конструктивно в гиромоторе (рис.2), размещаемом обычно в кожухе, играющем роль внутренней рамки подвеса. Двухстепенной подвес (рис.8) обеспечивает возможность разворота оси гироскопа относительно лишь одного из направлений, перпендикулярных его оси собственного вращения - по углу . Такие гиро- скопы называют двухстепенными.

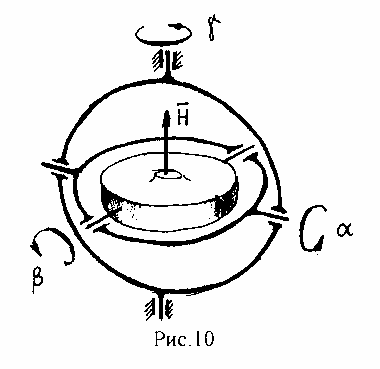
Трехстепенной подвес (рис.9) обеспечивает возможность разворота оси гироскопа относительно двух направлений - по углам и (трехстепенной гироскоп). Однако, ес- ли в этой схеме гироскоп развернется на угол , равный 90o (или кратный ему), то ось собственного вращения гироскопа совместится с наружной осью подвеса и при этом ги- роскоп потеряет возможность вращаться вокруг вертикальной оси (эффект "сложения рамок подвеса"). Поэтому, если гироскоп предназначен для использования в условиях его возможного произвольного разворота, он оснащается трехстепенным подвесом с допол- нительной рамкой. Рис.10 иллюстрирует один из возможных вариантов подобного подве- са.
Рассмотрим теперь вопрос о том, как изменятся уравнения движения гироскопа (8) с
M x1
M b , M y1
M a / cos b .
Для получения искомых уравнений следует повторить выполненные ранее выкладки, дополнительно учтя вектор кинетического момента элементов карданова подвеса. В ре- зультате будем иметь следующие уравнения, аналогичные (8):
Ja (b )a&&
2Jaba&b& sin b cos b
H b& cos b
M a ,
(29)
Здесь
J b b&&
Jaba& 2 sin b cos b
H a& cos b
M b.
Ja (b) (J э J ку ) cos2 b
J kz sin 2 b
J py ,
Jab
J b
J э J ky J kz ,
J э J kx ,
Jэ - экваториальный момент инерции гироскопа, Jkx, Jky, Jkz - моменты инерции кожуха гироскопа относительно резалевых осей x1, y1, z1 соответственно (см. рис.8), Jpy - момент инерции рамки (Р на рис.9) относительно оси вращения по углу .
Естественно, если инерционностью элементов подвеса пренебречь, то уравнения (29)
переходят в уравнения (8).
Входящие в уравнения (29) М и М в общем случае включают в себя "полезную" со- ставляющую - управляющие моменты или моменты, зависящие от измеряемых парамет- ров - и "вредную" составляющую, каковой являются моменты сухого и вязкого трения в осях подвеса, моменты, обусловливаемые деформацией жгутов, с помощью которых по- дается питание на гиромотор, и т.п.
динат