

3.4. Гирогоризонт с шулеровской коррекцией
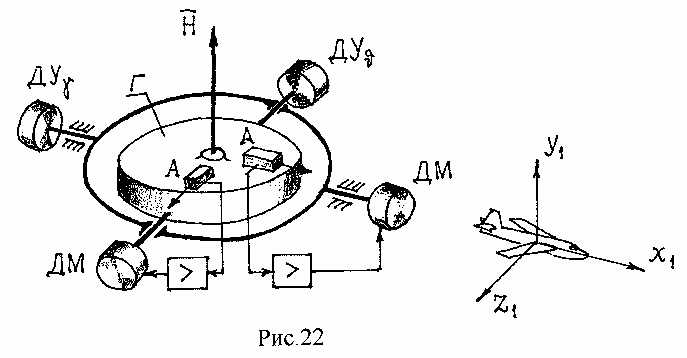
Рассмотрим гирогоризонт с коррекцией, контур коррекции которого построен с ис- пользованием акселерометра и датчика момента. Схема такого устройства изображена на рис.22; она включает гироскоп Г в трехстепенном подвесе, датчики углов ДУ и датчики моментов ДМ, установленные по осям подвеса, акселерометры А, оси чувствительности
 которых
(на
рис.22
они
показаны
стрелками)
ортогональны
вектору
H кинетического
момента
гироскопа,
и
электронные
звенья.
Задачей
устройства
является
удержание
векто-
которых
(на
рис.22
они
показаны
стрелками)
ортогональны
вектору
H кинетического
момента
гироскопа,
и
электронные
звенья.
Задачей
устройства
является
удержание
векто-
 ра
H
в
направлении
местной
вертикали.
Если
эта
задача
решается
и
гирогоризонт
ори-
ентирован
на
объекте
так,
что
его
наружная
ось
подвеса
направлена
по
продольной
оси
объекта
x1,
как
показано
на
рисунке,
то
ДУ
выдают
в
систему
управления
значения
тре-
буемых
углов
тангажа и
крена (или
дифферента
и
угла
бортовой
качки).
ра
H
в
направлении
местной
вертикали.
Если
эта
задача
решается
и
гирогоризонт
ори-
ентирован
на
объекте
так,
что
его
наружная
ось
подвеса
направлена
по
продольной
оси
объекта
x1,
как
показано
на
рисунке,
то
ДУ
выдают
в
систему
управления
значения
тре-
буемых
углов
тангажа и
крена (или
дифферента
и
угла
бортовой
качки).
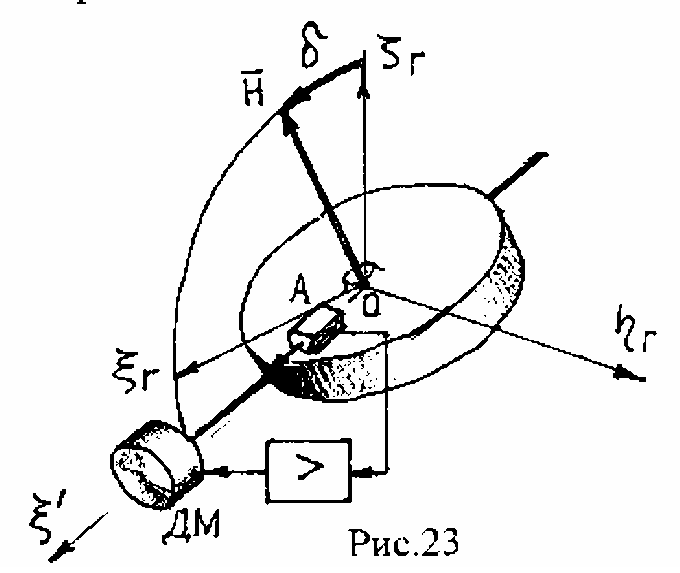
Гирогоризонт включает два идентичных контура построения вертикали. Проанализируем работу одного из них, используя рис.23 - фрагмент рис.22. На рис.23 О г г г - местная горизонтальная система координат, ориентированная в направлении движения объекта: ось О г - местная вертикаль; ось О г при =0 совпадает с продольной осью объек- та.
 Обозначим,
как
и
ранее, -
отклонение
H
от
вертикали;
этот
угол
будем
считать
малым.
Составим
уравнение
движения
гироскопа
в
проекции
на
ось
О
,
ограничиваясь
рамками
прецессионной
теории
и
используя
принцип
Д’Аламбера
Обозначим,
как
и
ранее, -
отклонение
H
от
вертикали;
этот
угол
будем
считать
малым.
Составим
уравнение
движения
гироскопа
в
проекции
на
ось
О
,
ограничиваясь
рамками
прецессионной
теории
и
используя
принцип
Д’Аламбера
KW& M 0.
Первое слагаемое в этом ра- венстве есть гироскопический момент, включая момент, обу- словленный переносным движени- ем - движением объекта относи- тельно Земли и вращением Земли; второе слагаемое - момент внеш-
них сил. При этом
W& - кажущее-
ся ускорение, измеренное акселе- рометром, К - коэффициент пере- дачи от входа по ускорению до выхода по моменту (т.е. произве- дение коэффициентов передачи акселерометра, электронного зве-
на и датчика момента), М - прочие моменты, включая вредный. Важно отметить, что
под К понимается в общем случае не константа, а некоторый оператор, который надле-
жит выбрать.
Как следует из рис.23,
W& W&x dW&z .
W
z
предыдущее равенство, после преобразований получим
g , и подставляя W& в
& K gH 1
u KW& H 1
MH 1 .
(42)
Стоящие в правой части уравнения (42) члены определяют ошибки гирогоризонта. Следует отметить, что ошибки гироскопических устройств, обусловленные скоростными членами (в данном случае u , ) принято называть скоростными, а обусловленные ус- корениями (перегрузками) - баллистическими (в данном случае они обусловливаются
членом
W&x ). Чтобы исключить ошибки гирогоризонта вследствие движения объекта,
используем шулеровскую настройку контура построения вертикали. Сопоставляя ле- вую часть уравнения (42) с левой частью уравнения (38) для невозмущаемого маятника (т.е. при l = R), обнаружим, что шулеровская настройка гирогоризонта обеспечивает- ся, если передаточная функция, соответствующая оператору К, имеет вид
K ( H / R ) p 1 ,
т.е. контур коррекции является интегрирующим. При указанном К уравнение (42) прини-
мает вид
&& 2
щ
( u&
W& R 1 ) &
M& H 1 .
(43)
Но, как вытекает из раздела 3.2, выражение в скобках обращается в нуль, а & h дос- таточно мало. Впрочем, и малое & h в прецизионных системах компенсируется путем подачи на ДМ вычисляемого в системе управления сигнала, соответствующего моменту
M H h .
Таким образом построенный гирогоризонт невозмущаем, и основной источник его оши- бок - вредный момент по оси подвеса, причем переменная составляющая этого момента. Влияние этой ошибки уменьшается с ростом кинетического момента гироскопа.
Процедура интегрирования осуществляется электронным звеном; при этом в конту- ре коррекции второго канала электронным звеном должно также учитываться (соответст- вующим изменением коэффициента усиления) отклонение направления момента, разви- ваемого ДМ, от плоскости горизонта при 0.
В заключение отметим не вполне строгое, но прозрачное объяснение эффекта шуле-
ровской настройки гирогоризонта.
При движении объекта со скоростью V местная вертикаль поворачивается с угловой скоростью V/R, которую надо сообщить гироскопу. А для этого надо приложить к нему момент, равный по величине M = (H/R)V. Отсюда, с учетом того, что V определяется ин- тегрированием сигнала акселерометра, сразу вытекает приведенный выше вид оператора К.