

1. Основные сведения из теории гироскопа
1.1. Движение абсолютно твердого тела вокруг неподвижной точки
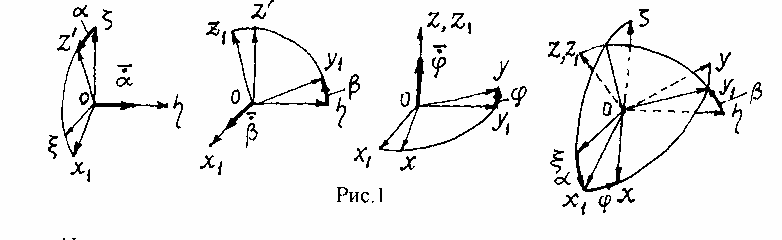
Для описания движения тела вокруг неподвижной точки О введем две ортогональные правые системы координат: систему координат Оxyz, связанную с телом и ориентирован- ную относительно него пока произвольным образом, и неподвижную, инерциальную сис- тему координат O . Тогда ориентация тела в инерциальном пространстве будет опреде- ляться взаимной ориентацией введенных систем координат. Она же характеризуется тремя эйлеровыми углами , и , вводимыми, например, так, как показано на рис.1. На этом


 рисунке
изображены
также
векторные
составляющие
a&
,
b&
,
j&
рисунке
изображены
также
векторные
составляющие
a&
,
b&
,
j&
угловой скорости разво-
 рота
тела
w
на
упомянутые
углы.
Из
астрономии
в
гироскопию
перешли
названия
вра-
щательных
движений
по
углам , , :
соответственно
прецессия,
нутация
и
ротация
(или
собственное
вращение).
Однако,
правильнее
связывать
указанные составляющие
вращательного
движения
тела
с
причинами,
их
вызывающими,
о
чем
будет
сказано
ниже.
рота
тела
w
на
упомянутые
углы.
Из
астрономии
в
гироскопию
перешли
названия
вра-
щательных
движений
по
углам , , :
соответственно
прецессия,
нутация
и
ротация
(или
собственное
вращение).
Однако,
правильнее
связывать
указанные составляющие
вращательного
движения
тела
с
причинами,
их
вызывающими,
о
чем
будет
сказано
ниже.
Используя рис.1 и обозначая индексом "о" орт соответствующий оси можно записать
связь векторов
a& , b& , j&
с их величинами
o
a& ,b& ,j&
o
a& a& cos by1
1
a& sin bz1 ,
(1)
1
Сумма векторов
a& , b&
и j&


 есть,
очевидно,
угловая
скорость
тела
w
,
т.е.
есть,
очевидно,
угловая
скорость
тела
w
,
т.е.


 w a&
w a&
b& j& .
Проектируя обе части этого равенства на оси связанной системы координат, исполь-
 зуя
при
этом
принятые
в
теоретической
механике
обозначения
для
проекций
вектора
w
зуя
при
этом
принятые
в
теоретической
механике
обозначения
для
проекций
вектора
w

 p
p
с учетом (1) получим
w x o, q
w y o, r
w z o ,
p a& cos b sin j
q a& cos b cosj
b& cosj ,
b& sin j ,
(2)
r a& sin b
j&.
 Это
-
кинематические
уравнения
Эйлера
для
вращательного
движения
тела
вокруг
неподвижной
точки.
Они
связывают
составляющие
угловой
скорости
тела
w
с
углами,
характеризующими
ориентацию
тела.
Это
-
кинематические
уравнения
Эйлера
для
вращательного
движения
тела
вокруг
неподвижной
точки.
Они
связывают
составляющие
угловой
скорости
тела
w
с
углами,
характеризующими
ориентацию
тела.
Уравнения, связывающие составляющие угловой скорости с действующими на тело
 моментами
называются
динамическими
уравнениями.
Впервые
они
были
получены
так-
же
Эйлером.
Выводятся
эти
уравнения
на
базе
фундаментальной
теоремы
теоретической
механики
об
изменении
момента
количества
движения
(кинетического
момента)
G
тела.
моментами
называются
динамическими
уравнениями.
Впервые
они
были
получены
так-
же
Эйлером.
Выводятся
эти
уравнения
на
базе
фундаментальной
теоремы
теоретической
механики
об
изменении
момента
количества
движения
(кинетического
момента)
G
тела.
Согласно этой теореме

 G& M
, (3)
G& M
, (3)

 где
M -
суммарный
момент,
действующий
на
тело.
Если
теперь,
воспользовавшись
про-
извольностью
выбора
ориентации
связанной
системы
координат,
направить
оси
x,
y,
z
по
главным
осям
инерции
тела,
то
выражение
для
G
будет
иметь
достаточно
простой
вид
где
M -
суммарный
момент,
действующий
на
тело.
Если
теперь,
воспользовавшись
про-
извольностью
выбора
ориентации
связанной
системы
координат,
направить
оси
x,
y,
z
по
главным
осям
инерции
тела,
то
выражение
для
G
будет
иметь
достаточно
простой
вид
G pJ x x o qJ y yo rJ z z o, (4)
где Jx, Jy, Jz - моменты инерции тела относительно осей x, y и z соответственно. Под- ставляя (4) в (3) и проектируя обе части векторного уравнения на оси связанной системы координат, получим требуемые динамические уравнения
J x p&
J yq&
J z r&
J z J y qr M x ,
J x J z rp M y,
J y J x pq M z .
(5)
Полную систему уравнений вращательного движения твердого тела вокруг неподвиж- ной точки составляют кинематические уравнения (2), динамические уравнения (5) и соот- ношения для определения составляющих момента, имеющие в общем случае вид
M x M x t;a, b,j ,
M y M y t;a, b,j ,
M z M z t;a, b,j .
(6)
Для получения решения этой системы, описывающего вращение тела, необходимо за- дать начальные условия: значения на начальный момент времени углов , , и состав- ляющих угловой скорости p, q, r.
Даже при условии, что на тело действует момент, обусловленный только силой тяже-
сти, приведенная система уравнений допускает получение решения в элементарных функ- циях лишь в отдельных случаях (случаи Эйлера-Пуансо, Лагранжа-Пуассона и Ковалев- ской).